МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Белорусский национальный технический университет
Филиал БНТУ «Жодинский государственный политехнический колледж»
СОГЛАСОВАНО УТВЕРЖДАЮ
Заместитель директора по УР Директор колледжа
____________Л.А. Алексеенко ____________ Т.Н. Лойко
«____»_________________2015 г. «____»_________________2015 г.
ЭЛЕКТРОПРИВОД И ЭЛЕКТРОАВТОМАТИКА
Методические указания по выполнению контрольной работы и экзаменационные вопросы для учащихся специальности
Технология машиностроения»
Курса заочной формы обучения
Составил: Потапенко Руслан Александрович, преподаватель спецдисциплин Жодинского государственного политехнического колледжа
Методические рекомендации составлены в соответствии с типовой учебной программой по специальности 2-36.01.01 «Технология машиностроения» утверждённой Министерством образования РБ 05.06.2009 г.
Обсуждены и одобрены цикловой комиссией комиссии Специальных дисциплин, протокол №___________ от «___» ______________2015 г.
Председатель цикловой комиссии
______________ /Семёнова О.П./
Электропривод и электроавтоматика. Методические указания по выполнению контрольной работы и экзаменационные вопросы для учащихся специальности 2-36.01.01 «Технология машиностроения» 2 курса заочной формы обучения. – 2-я редакция. – Филиал БНТУ ЖГПК, 2015. - 26 с.
Пояснительная записка
Программой дисциплины «Электропривод и электроавтоматика» предусматривается изучение свойств, характеристик и возможностей регулирования координат электроприводов постоянного и переменного тока, сведений о системах автоматики и элементах систем автоматики, основных принципах построения замкнутых и разомкнутых систем управления электроприводами с различными типами двигателей.
Изучение дисциплины «Электропривод и электроавтоматика» основывается на знаниях учащихся, полученных при изучении дисциплин «Физика», «Техническая механика», «Электротехника с основами электроники».
Основная цель преподавания дисциплины - формирование у учащихся знаний по электрическим приводам и устройствам электроавтоматики.
При выполнении практических и лабораторных работ учащиеся
должны приобрести навыки снятия и проведения анализа электромеханических и механических характеристик электрического привода, делать заключение о свойствах электропривода.
В результате изучения дисциплины учащиеся должны:
знать на уровне представления
устройство и принцип действия различных видов электроприводов;
системы автоматики и их элементную базу.
знать на уровне понимания:
методику расчёта основных характеристик отдельных видов приводов технологического оборудования;
технологическое назначение элементов систем автоматики и систем управления оборудованием.
уметь:
самостоятельно разбираться в несложных принципиальных схемах различных приводов технологического оборудования;
выбирать вид и рассчитывать основные характеристики приводов технологического оборудования;
выбирать наиболее экономически целесообразный вид привода для станочного оборудования.
По дисциплине предусматривается выполнение одной домашней контрольной работы. По окончании изучения дисциплины проводится экзамен.
Для облегчения работы студентов заочного отделения организованы обзорные лекции, семинарские занятия и консультации.
Обзорные лекции организуются во время установочной и лабораторно-экзаменационной сессии.
Консультации проводятся непрерывно в течение всего учебного года в межсессионный период по заранее установленному графику.
Если студент-заочник не имеет возможности личного общения с преподавателями, то он может пользоваться письменной консультацией, адресуя письма в учреждение образования.
Теоретический курс необходимо прорабатывать последовательно по отдельным темам в соответствии с прилагаемой программой.
Работа с учебником должна сопровождаться решением задач по изучаемому разделу курса. В ходе решения задач лучше усваивается и закрепляется теоретический материал, а также лучше выясняется суть данного материала.
По дисциплине «Электропривод и электроавтоматика» студент-заочник должен выполнить домашнюю контрольную работу, которая содержит три теоретических вопроса и задачу.
Выполненные контрольные работы студент-заочник направляет методисту учреждения образования, где они регистрируются и проверяются.
Если все вопросы и задача контрольной работы решены правильно, то она засчитывается и возвращается студенту. Если студентом допущены грубые и существенные ошибки, то работа возвращается ему для исправления. Исправленную контрольную работу студент заочник должен повторно выслать методисту, обязательно прилагая первый вариант своего решения задач с замечаниями преподавателя.
Контрольные работы студент должен отправить в учебное заведение не позже чем за 20 дней до начала экзаменационной сессии. Работы, отправленные позже, проверяются после сессии.
Лабораторные и практические работы обычно проводятся во время сессии, в специально отведённое для этого время. Выполненные работы студент должен оформить и защитить.
При сдаче экзамена студент-заочник обязан предъявить преподавателю домашнюю контрольную работу и отчёты оформленных лабораторных и практических работ.
К сдаче экзамена по дисциплине «Электропривод и электроавтоматика» студент допускается преподавателем после успешной защиты домашней контрольной работы, а также лабораторных и практических работ. Во всех случаях экзамен сдаётся очно, явка студента-заочника на экзамен строго обязательна!
Порядок выполнения домашней контрольной работы, практических и лабораторных работ, сдачи экзамена определяются программой по дисциплине и графиком учебного процесса.
В настоящие методические указания и домашнее контрольное задание могут быть внесены изменения и дополнения в соответствии с требованиями специализации студента.
Раздел 1. Электропривод.
Тема 2.2 Датчики.
1. Назначение и область применения датчиков.
2. Классификация датчиков.
3. Датчики времени, их назначение, конструкция и принцип работы.
4. Датчики скорости, их назначение, конструкция и принцип работы.
5. Датчики положения, их назначение, конструкция и принцип работы.
6. Датчики тока, их назначение, конструкция и принцип работы.
Литература [ 4 ], с.255…263.
Рекомендации по выполнению домашней контрольной работы.
Домашняя контрольная работа должна выполняется в ученической тетради с пронумерованными страницами или на листах бумаги формата А4.
Домашняя контрольная работа должна быть написана разборчивым почерком или выполнена с использованием компьютерной техники, при этом шрифт должен быть Times New Roman 14.
Для замечаний и поправок преподавателя оставляются поля 20 мм.
При оформлении работы на компьютере границы страниц должны быть следующие: сверху 15 мм, снизу 20 мм, слева 30 мм, справа 20 мм.
Работа должна содержать в себе:
1 страница – Титульный лист;
2 страница – Содержание;
3 страница – Введение;
4 и последующие страницы – Выполнение домашней контрольной работы в соответствии с заданием;
Предпоследняя страница – Заключение;
Последняя страница – Перечень использованной литературы.
На последней странице домашней контрольной работы должна стоять дата выполнения контрольной работы и подпись учащегося.
В конце домашней контрольной работы должен быть вставлен чистый лист бумаги для выполнения рецензии преподавателем.
Домашняя контрольная работа не должна превышать 24 страницы печатного текста (включая все вышеуказанные страницы).
На проверку домашней контрольной работы преподавателю отводится время – 7 дней с момента поступления и регистрации работы в методическом кабинете заочного отделения.
Работу можно зарегистрировать в методическом кабинете заочного отделения (в соответствии с графиком работы). Также работу можно выслать почтой на адрес учебного заведения (222160, Минская обл., г. Жодино,
ул. 50 лет Октября, 1, Жодинский государственный политехнический колледж, Заочное отделение) или зарегистрировать и оставить в ящике для контрольных работ на вахте учебного заведения.
Работа должна быть зачтена за 20 дней до начала сессии, так как за 20 дней до сессии высылается вызов на сессию только тем учащимся, которые получили зачёт по домашним контрольным работам. Всем остальным учащимся, не соблюдающим учебный график, высылается извещение о начале сессии.
Варианты вопросов и задач контрольной работы студент-заочник находит в соответствии с номером зачётной книжки по таблице 1.
Домашняя контрольная работа содержит три теоретических вопроса и задачу.
Предпоследняя цифра номера зачётной книжки 
|
|
|
|
|
|
|
|
|
|
|
Последняя цифра номера зачётной книжки

| Пример выбора номеров заданий и задач:
Номер зачётки учащегося № 328
Значит, учащийся должен рассмотреть вопросы № 17; 59; 51 и решить задачи № 1 и №2
|
|
| 56; 18; 40
Задача 1
Задача 2
| 57; 19; 41
Задача 1
Задача 2
| 58; 20; 42
Задача 1
Задача 2
| 1; 32; 51
Задача 1
Задача 2
| 2; 33; 52
Задача 1
Задача 2
| 3; 34; 53
Задача 1
Задача 2
| 4; 35; 54
Задача 1
Задача 2
| 17; 58; 45
Задача 1
Задача 2
| 18; 59; 46
Задача 1
Задача 2
| 19; 60; 47
Задача 1
Задача 2
|
|
| 60; 22; 44
Задача 1
Задача 2
| 29; 51; 3
Задача 1
Задача 2
| 27; 58; 47
Задача 1
Задача 2
| 28; 59; 48
Задача 1
Задача 2
| 29; 60; 49
Задача 1
Задача 2
| 5; 37; 59
Задача 1
Задача 2
| 31; 3; 15
Задача 1
Задача 2
| 32; 4; 16
Задача 1
Задача 2
| 33; 5; 17
Задача 1
Задача 2
| 55; 17; 39
Задача 1
Задача 2
|
|
| 14; 41; 54
Задача 1
Задача 2
| 39; 11; 53
Задача 1
Задача 2
| 26; 57; 36
Задача 1
Задача 2
| 25; 47; 59
Задача 1
Задача 2
| 5; 32; 55
Задача 1
Задача 2
| 6; 33; 56
Задача 1
Задача 2
| 7; 34; 57
Задача 1
Задача 2
| 20; 45; 4
Задача 1
Задача 2
| 45; 27; 59
Задача 1
Задача 2
| 9; 36; 59
Задача 1
Задача 2
|
|
| 10; 42; 54
Задача 1
Задача 2
| 49; 30; 13
Задача 1
Задача 2
| 25; 56; 15
Задача 1
Задача 2
| 11; 52; 35
Задача 1
Задача 2
| 12; 53; 36
Задача 1
Задача 2
| 13; 54; 37
Задача 1
Задача 2
| 17; 44; 7
Задача 1
Задача 2
| 18; 45; 8
Задача 1
Задача 2
| 19; 46; 9
Задача 1
Задача 2
| 15; 56; 39
Задача 1
Задача 2
|
|
| 20; 2; 54
Задача 1
Задача 2
| 59; 21; 43
Задача 1
Задача 2
| 1; 33; 55
Задача 1
Задача 2
| 2; 34; 56
Задача 1
Задача 2
| 3; 35; 57
Задача 1
Задача 2
| 4; 36; 58
Задача 1
Задача 2
| 24; 51; 14
Задача 1
Задача 2
| 35; 7; 59
Задача 1
Задача 2
| 10; 37; 50
Задача 1
Задача 2
| 24; 46; 58
Задача 1
Задача 2
|
|
| 30; 52; 4
Задача 1
Задача 2
| 15; 42; 5
Задача 1
Задача 2
| 16; 43; 6
Задача 1
Задача 2
| 11; 38; 51
Задача 1
Задача 2
| 12; 39; 52
Задача 1
Задача 2
| 27; 49; 1
Задача 1
Задача 2
| 16; 58; 50
Задача 1
Задача 2
| 28; 50; 2
Задача 1
Задача 2
| 16; 57; 40
Задача 1
Задача 2
| 34; 6; 48
Задача 1
Задача 2
|
|
| 40; 12; 54
Задача 1
Задача 2
| 37; 8; 19
Задача 1
Задача 2
| 41; 23; 55
Задача 1
Задача 2
| 42; 24; 56
Задача 1
Задача 2
| 43; 25; 57
Задача 1
Задача 2
| 37; 9; 41
Задача 1
Задача 2
| 26; 48; 60
Задача 1
Задача 2
| 38; 10; 52
Задача 1
Задача 2
| 20; 47; 10
Задача 1
Задача 2
| 44; 26; 58
Задача 1
Задача 2
|
|
| 50; 31; 14
Задача 1
Задача 2
| 17; 59; 51
Задача 1
Задача 2
| 18; 60; 21
Задача 1
Задача 2
| 19; 1; 53
Задача 1
Задача 2
| 15; 58; 33
Задача 1
Задача 2
| 47; 28; 11
Задача 1
Задача 2
| 36; 8; 60
Задача 1
Задача 2
| 48; 29; 12
Задача 1
Задача 2
| 30; 1; 50
Задача 1
Задача 2
| 54; 16; 38
Задача 1
Задача 2
|
|
| 21; 48; 11
Задача 1
Задача 2
| 22; 49; 12
Задача 1
Задача 2
| 23; 50; 13
Задача 1
Задача 2
| 21; 43; 55
Задача 1
Задача 2
| 22; 44; 56
Задача 1
Задача 2
| 23; 45; 57
Задача 1
Задача 2
| 51; 13; 35
Задача 1
Задача 2
| 52; 14; 36
Задача 1
Задача 2
| 53; 15; 37
Задача 1
Задача 2
| 8; 35; 58
Задача 1
Задача 2
|
|
| 7; 39; 48
Задача 1
Задача 2
| 8; 40; 51
Задача 1
Задача 2
| 9; 41; 53
Задача 1
Задача 2
| 6; 38; 60
Задача 1
Задача 2
| 11; 53; 45
Задача 1
Задача 2
| 12; 54; 46
Задача 1
Задача 2
| 13; 55; 47
Задача 1
Задача 2
| 14; 56; 48
Задача 1
Задача 2
| 15; 57; 49
Задача 1
Задача 2
| 14; 55; 38
Задача 1
Задача 2
|
Таблица 1
Вопросы для выполнения домашней контрольной работы:
1. Понятие электрического привода (ЭП).
2. Классификация электрических приводов по назначению, по характеру движения, по виду силового преобразователя, по роду тока, по числу используемых двигателей.
3. Механические звенья электропривода.
4. Расчётные схемы механической части ЭП.
5. Статические моменты сопротивления.
6. Приведение статических моментов, сил, моментов инерции и поступательно движущихся масс к одному валу.
7. Механические характеристики электродвигателя и исполнительного органа рабочей машины.
8. Уравнение движения электропривода.
9. Неустановившееся движение при постоянных моментах двигателя и нагрузки.
10. Неустановившееся движение при линейных механических характеристиках двигателя и исполнительного органа.
11. Схема включения двигателя постоянного тока независимого возбуждения (ДПТ НВ) и режимы его работы.
12. Электромеханические и механические характеристики двигателя постоянного тока независимого возбуждения в двигательном режиме.
13. Пуск и торможение двигателя постоянного тока независимого возбуждения.
14. Регулирование координат с помощью резисторов в цепи якоря, изменением магнитного потока и подводимого к якорю напряжения.
15. Схемы регулирования координат в системе «преобразователь напряжения – двигатель».
16. Схемы включения, статические характеристики и режимы работы двигателей постоянного тока последовательного и смешанного возбуждения.
17. Способы пуска и торможения двигателей постоянного тока последовательного и смешанного возбуждения.
18. Схемы включения и режимы работы асинхронного двигателя (АД) с короткозамкнутым и фазным ротором.
19. Электромеханические и механические характеристики асинхронного двигателя (АД).
20. Способы торможения асинхронного двигателя (АД).
21. Регулирование координат с помощью сопротивлений.
22. Регулирование координат изменением числа пар полюсов.
23. Регулирование координат изменением величины и частоты подводимого напряжения.
24. Схемы включения синхронного двигателя (СД).
25. Статические характеристики синхронного двигателя (СД).
26. Способы пуска и торможения синхронного двигателя (СД).
27. Режимы работы синхронного двигателя (СД).
28. Классификация систем автоматического регулирования.
29. Элементы автоматики, их общая характеристика.
30. Общие сведения о системах автоматического управления электроприводами (САУ ЭП) и их классификация.
31. Назначение и область применения датчиков.
32. Классификация датчиков.
33. Датчики времени, их назначение, конструкция и принцип работы.
34. Датчики скорости, их назначение, конструкция и принцип работы.
35. Датчики положения, их назначение, конструкция и принцип работы.
36. Датчики тока, их назначение, конструкция и принцип работы.
37. Классификация электрических аппаратов управления и защиты, их условное графическое и буквенное обозначения на электрических принципиальных схемах.
38. Электрические аппараты ручного управления: кнопки и ключи управления, рубильники, пакетные выключатели, контроллеры: устройство, маркировка, область применения.
39. Электрические аппараты дистанционного управления: электромагнитные контакторы и пускатели. Их устройство, принцип действия, маркировка, область применения.
40. Автоматические выключатели, их функциональное назначение, устройство и принцип действия.
41. Разъединители, их назначение.
42. Аппараты защиты – предохранители и тепловые реле: устройство, принцип действия, основные типы.
43. Расчёт и выбор аппаратов управления и защиты для схем автоматизированных электроприводов.
44. Назначение и область применения электромагнитных муфт и тормозных устройств, включающих и отключающих электромагнитов.
45. Основные конструктивные типы электромагнитных муфт: индукционные, порошковые, с механической связью: устройство, принцип действия, механические характеристики.
46. Электромагнитные тормозные устройства: основные конструктивные типы, принцип действия.
47. Включающие и отключающие электромагниты: основные конструктивные типы, принцип действия.
48. Типовая схема пуска двигателя постоянного тока с независимым возбуждением в функции времени.
49. Типовая схема пуска двигателя постоянного тока в две ступени в функции ЭДС и динамического торможения в функции времени.
50. Схема управления асинхронным двигателем переменного тока с использованием магнитного пускателя.
51. Реверсивная схема управления асинхронным двигателем переменного тока.
52. Типовая схема управления возбуждением синхронного двигателя в функции скорости.
53. Типовая схема управления возбуждением синхронного двигателя в функции тока.
54. Классификация элементов и устройств замкнутых систем автоматизированного управления электрического привода.
55. Принципы построения замкнутых структур электрического привода.
56. Построение систем подчинённого регулирования в замкнутых системах управления электрическими приводами.
57. Виды систем программного управления.
58. Числовое программное управление.
59. Кодирование информации. Цифровые коды.
60. Цикловое программное управление оборудованием. Функциональный состав цикловых систем программного управления.
Задача№1 для выполнения домашней контрольной работы:
По исходным данным (Таблица 2, в соответствии с номером шифра) рассчитать и построить графики естественных электромеханических и механических характеристик для двигателя постоянного тока независимого возбуждения.
Таблица 2 Исходные паспортные данные ДПТ НВ
| Номер шифра учащегося
| Номинальная мощность двигателя
Рном, кВт
| Номинальное напряжение двигателя
Uном, В
| Номинальная частота вращения ротора двигателя
nном, об/мин
| Номинальная сила тока двигателя
Iном, А
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример выполнения:
Дано:
Для ДПТ НВ рассчитать и построить естественные характеристики, используя следующие его паспортные (номинальные) данные: Рном= 300 кВт; Uном=440 В; nном=1250 об/мин; Iном=750 А.
Решение:
Для построения характеристик, представляющих собой прямые линии, достаточно рассчитать координаты двух точек: номинального режима и холостого хода.
Номинальная скорость двигателя определяется по формуле:
ωном= 2 • π • nном / 60 = 2 • 3,14 • 1250 / 60 = 131 рад/с;
Определяем номинальный момент двигателя по формуле:
Мном= Рном/ ωном = 300000/131 = 2306 Н•м.
Для определения скорости холостого хода определяем:
kФном= Мном/ Iном = 2306 / 750 = 3,08 В•с
Тогда скорость идеального холостого хода определяем по формуле:
ω0 = Uном/ (kФном) = 440 / 3,08 = 144 рад/с
По координатам точек холостого хода А (ω = ω0, I = М = 0) и номинального режима В (ω = ωном, I = Iном, М = Мном) строим естественные электромеханическую ω(I) и механическую ω(М) характеристики.
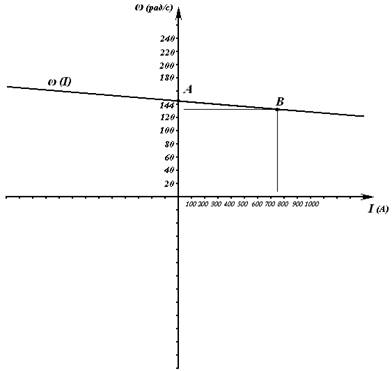
Рисунок 1 Электромеханическая характеристика ω(I)
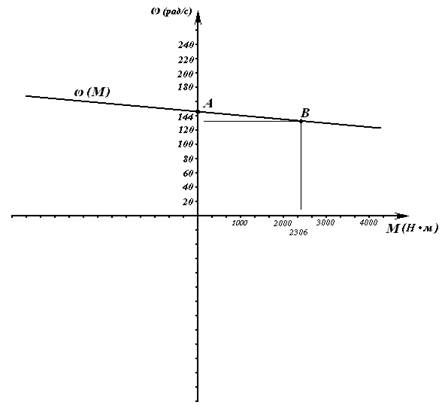
Рисунок 2 Механическая характеристика ω(М)
Задача№2 для выполнения домашней контрольной работы:
По исходным данным (Таблица 3, в соответствии с номером шифра) рассчитать естественную механическую характеристику асинхронного электродвигателя и по полученным данным построить зависимости M(S) и M(ω).
Таблица 3 Исходные паспортные данные АД с короткозамкнутым ротором
| Номер вари-анта
| Номи-наль-
ная мощ-ность двига-теля
Рном, кВт
| Номи-наль-
ная частота враще-ния ротора двига-теля
nном, об/мин
| Номи-наль-
ная
сила
тока двига-теля
I1ном, А
| λм
| λ1
| р
| Номи-наль-ная час-тота тока АД
ƒ1ном, Гц
| Номи-наль-ное нап-ряже-ние АД
U1ном, В
|
|
|
|
| 29,3
| 2,3
|
|
|
|
|
|
| 15,5
|
| 30,2
| 1,9
|
| 1,8
|
|
|
|
| 14,1
|
| 27,6
| 2,0
|
| 1,9
|
|
|
|
| 14,3
|
| 27,9
| 2,4
|
| 2,1
|
|
|
|
| 15,2
|
| 29,6
| 2,5
|
| 2,2
|
|
|
|
| 15,1
|
| 29,5
| 2,1
|
| 2,4
|
|
|
|
| 14,5
|
| 28,2
| 2,3
|
| 2,3
|
|
|
|
| 14,7
|
| 28,4
| 1,8
|
|
|
|
|
|
| 15,3
|
| 29,9
| 1,7
|
| 1,7
|
|
|
|
| 14,9
|
| 28,7
| 2,2
|
| 1,95
|
|
|
|
|
|
| 29,3
| 2,3
|
|
|
|
|
|
| 15,5
|
| 30,2
| 1,9
|
| 1,8
|
|
|
|
| 14,1
|
| 27,6
| 2,0
|
| 1,9
|
|
|
|
| 14,3
|
| 27,9
| 2,4
|
| 2,1
|
|
|
|
| 15,2
|
| 29,6
| 2,5
|
| 2,2
|
|
|
|
| 15,1
|
| 29,5
| 2,1
|
| 2,4
|
|
|
|
| 14,5
|
| 28,2
| 2,3
|
| 2,3
|
|
|
|
| 14,7
|
| 28,4
| 1,8
|
|
|
|
|
|
| 15,3
|
| 29,9
| 1,7
|
| 1,7
|
|
|
|
| 14,9
|
| 28,7
| 2,2
|
| 1,95
|
|
|
Пример выполнения:
Дано:
Асинхронный двигатель с короткозамкнутым ротором имеет следующие паспортные данные: Рном= 15 кВт; nном=1465 об/мин; I1ном= 29,3 А; λм=Мк/Мном = 2,3; λI= I1н/ I1ном = 7; р = 2; ƒ1ном = 50Гц; U1ном = 380В. Рассчитать естественную механическую характеристику и по полученным данным построить графики зависимости М(S) и М(ω).
Решение:
Определяем номинальную угловую скорость:
ωном = (2 · π · nном)/60 = (2 · 3,14 · 1465)/60 = 153,34 рад/с.
Определяем скорость идеального холостого хода, номинальные момент и скольжение:
ωо = (2 · π · ƒ1ном)/р = (2 · 3,14 · 50)/2 = 157 рад/с;
Мном = Рном / ωном = 15000/153,34 = 98 Н·м;
Sном = (ωо - ωном)/ ωо = (157 – 153,34)/ 157 = 0,025.
Полученных данных достаточно для приближённого построения рабочего участка механической характеристики АД по двум точкам – номинальной (ωном, Мном) и холостого хода (ωо, 0).
Для получения полной механической характеристики продолжаем расчёт.
Определяем критический момент асинхронного двигателя:
Мк = λм · Мном = 2,3 · 98 = 225 Н·м;
Критическое скольжение асинхронного двигателя определяем по формуле:
______ _______
Sк = Sном · (λм + √ λм2 – 1) = 0,025 · (2,3 + √ 2,32 – 1) = 0,11.
Подставляем найденные значения Мк и Sк в формулу:
М = 2·Мк/(S/Sк + Sк/S) = 2·225/(S/0,11 + 0,11/S).
Задаваясь рядом значений S от 1 до 0, определяем по этой формуле соответствующие значения момента.
Угловую скорость для различных значений S определяем по формуле:
ω = ωо · (1 – S) = 157 · (1 – S).
Полученные результаты сносим в таблицу:
| S
|
| 0,8
| 0,6
| 0,4
| 0,2
| 0,11
|
|
| ω, рад/с
|
| 31,4
| 62,8
| 94,2
| 125,6
| 139,7
|
|
| М, Н·м
| 48,9
| 60,7
| 79,8
|
|
|
|
|
По полученным данным построим графики зависимости М (S) и М (ω), представленные на рисунках 3 и 4.
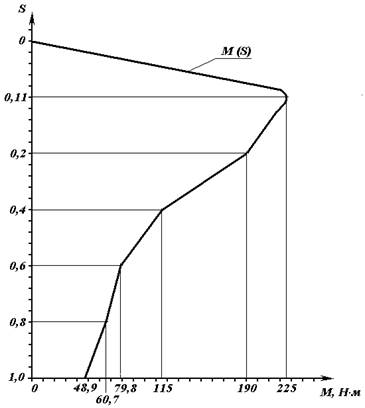
Рисунок 3 График зависимости М(S)
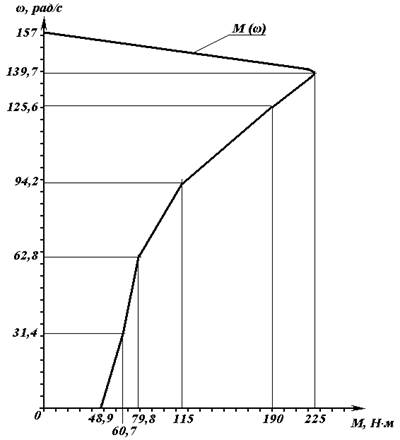
Рисунок 4 График зависимости М(ω)
Приложение 1
Вопросы к экзамену
по дисциплине «Электропривод и электроавтоматика»
1. Понятие электрического привода (ЭП).
2. Классификация электрических приводов по назначению, по характеру движения, по виду силового преобразователя, по роду тока, по числу используемых двигателей.
3. Механические звенья электропривода.
4. Расчётные схемы механической части ЭП.
5. Статические моменты сопротивления.
6. Приведение статических моментов, сил, моментов инерции и поступательно движущихся масс к одному валу.
7. Механические характеристики электродвигателя и исполнительного органа рабочей машины.
8. Уравнение движения электропривода.
9. Неустановившееся движение при постоянных моментах двигателя и нагрузки.
10. Неустановившееся движение при линейных механических характеристиках двигателя и исполнительного органа.
11. Схема включения двигателя постоянного тока независимого возбуждения (ДПТ НВ) и режимы его работы.
12. Электромеханические и механические характеристики двигателя постоянного тока независимого возбуждения в двигательном режиме.
13. Пуск и торможение двигателя постоянного тока независимого возбуждения.
14. Регулирование координат с помощью резисторов в цепи якоря, изменением магнитного потока и подводимого к якорю напряжения.
15. Схемы регулирования координат в системе «преобразователь напряжения – двигатель».
16. Схемы включения, статические характеристики и режимы работы двигателей постоянного тока последовательного и смешанного возбуждения.
17. Способы пуска и торможения двигателей постоянного тока последовательного и смешанного возбуждения.
18. Схемы включения и режимы работы асинхронного двигателя (АД) с короткозамкнутым и фазным ротором.
19. Электромеханические и механические характеристики асинхронного двигателя (АД).
20. Способы торможения асинхронного двигателя (АД).
21. Регулирование координат с помощью сопротивлений.
22. Регулирование координат изменением числа пар полюсов.
23. Регулирование координат изменением величины и частоты подводимого напряжения.
24. Схемы включения синхронного двигателя (СД).
25. Статические характеристики синхронного двигателя (СД).
26. Способы пуска и торможения синхронного двигателя (СД).
27. Режимы работы синхронного двигателя (СД).
28. Классификация систем автоматического регулирования.
29. Элементы автоматики, их общая характеристика.
30. Общие сведения о системах автоматического управления электроприводами (САУ ЭП) и их классификация.
31. Назначение и область применения датчиков.
32. Классификация датчиков.
33. Датчики времени, их назначение, конструкция и принцип работы.
34. Датчики скорости, их назначение, конструкция и принцип работы.
35. Датчики положения, их назначение, конструкция и принцип работы.
36. Датчики тока, их назначение, конструкция и принцип работы.
37. Классификация электрических аппаратов управления и защиты, их условное графическое и буквенное обозначения на электрических принципиальных схемах.
38. Электрические аппараты ручного управления: кнопки и ключи управления, рубильники, пакетные выключатели, контроллеры: устройство, маркировка, область применения.
39. Электрические аппараты дистанционного управления: электромагнитные контакторы и пускатели. Их устройство, принцип действия, маркировка, область применения.
40. Автоматические выключатели, их функциональное назначение, устройство и принцип действия.
41. Разъединители, их назначение.
42. Аппараты защиты – предохранители и тепловые реле: устройство, принцип действия, основные типы.
43. Расчёт и выбор аппаратов управления и защиты для схем автоматизированных электроприводов.
44. Назначение и область применения электромагнитных муфт и тормозных устройств, включающих и отключающих электромагнитов.
45. Основные конструктивные типы электромагнитных муфт: индукционные, порошковые, с механической связью: устройство, принцип действия, механические характеристики.
46. Электромагнитные тормозные устройства: основные конструктивные типы, принцип действия.
47. Включающие и отключающие электромагниты: основные конструктивные типы, принцип действия.
48. Типовая схема пуска двигателя постоянного тока с независимым возбуждением в функции времени.
49. Типовая схема пуска двигателя постоянного тока в две ступени в функции ЭДС и динамического торможения в функции времени.
50. Схема управления асинхронным двигателем переменного тока с использованием магнитного пускателя.
51. Реверсивная схема управления асинхронным двигателем переменного тока.
52. Типовая схема управления возбуждением синхронного двигателя в функции скорости.
53. Типовая схема управления возбуждением синхронного двигателя в функции тока.
54. Классификация элементов и устройств замкнутых систем автоматизированного управления электрического привода.
55. Принципы построения замкнутых структур электрического привода.
56. Построение систем подчинённого регулирования в замкнутых системах управления электрическими приводами.
57. Виды систем программного управления.
58. Числовое программное управление.
59. Кодирование информации. Цифровые коды.
60. Цикловое программное управление оборудованием. Функциональный состав цикловых систем программного управления.
Приложение 2
Задание к экзамену
по дисциплине «Электропривод и электроавтоматика»
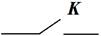
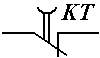
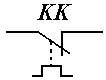
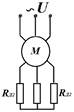
Расшифруйте условные графические изображения, показанные на рисунке:
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Белорусский национальный технический университет
Филиал БНТУ «Жодинский государственный политехнический колледж»
СОГЛАСОВАНО УТВЕРЖДАЮ
Заместитель директора по УР Директор колледжа
____________Л.А. Алексеенко ____________ Т.Н. Лойко
«____»_________________2015 г. «____»_________________2015 г.
ЭЛЕКТРОПРИВОД И ЭЛЕКТРОАВТОМАТИКА
Методические указания по выполнению контрольной работы и экзаменационные вопросы для учащихся специальности
Технология машиностроения»