

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
После того как мы выбрали структуру модели и у каждой модели есть свой набор параметров, который мы не знаем(которые надо измерить). Это связано с тем, что происходит внешние изменения среды (нестационарность). В случае применения кибернетической модели для географически удаленных, но физически подобных объектов требует «подстройки» параметров модели. Т.е. встает задача, на основе экспериментов над нашим объектом управления и над нашей кибернетической моделью вычислить или оценить конкретные значения параметров, которыми мы и будем описывать нашу модель.
Суть процесса (рис. 4.16): подаем некое входное воздействие Xi на объект и на модель и смотрим отклики. Варьируем параметры модели, чтобы отклики a,b были близки и тем самым модель Y* будет «похожа» на реальный объект Y (Y было похоже на Y*).
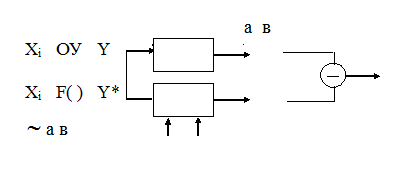
Рисунок 4.16
Если Y похоже на Y*, то параметры а и в принимаем за параметры модели объекта управления. Этот процесс называется процессом идентификации.
Процесс идентификации требует проведения огромного количества экспериментов, поэтому встает задача минимизации их количества – это связано с тем, что объект управления является сложной системой.
Такой процесс уменьшения числа экспериментов и называется планированием экспериментов над кибернетическими моделями в процессе идентификации. Иногда такие кибернетические модели трактуют как имитационные модели объекта управления.
В результате всех предыдущих шагов нам удалось получить структурное описание ОУ. В виде модели объекта управления могут выступать кибернетические модели:
1. дифференциальные, интегро-дифференциальные, алгебраические уравнения;
2. уравнения регрессионного или факторного анализа (стохастические модели);
|
|
3. семантические модели.
Иногда под математическим моделированием понимается программные компьютерные реализации любой из этих моделей. Здесь удобно употреблять терминологию – машинное, комьютерное моделирование.
В настоящее время модель является неотемлемой частью контура управления. Сначала управление происходит на модели, затем смотрится, насколько успешно оно осуществляется, только после этого осуществляется реальное управление объектом.
Этот вывод был получен строго математически и получил название – «принцип дуального управления Фельдбаума».
Еще раз подчеркнем что суть идентификации (в отличии от оценивания) заключается в том, что идентификации мы имеем реальный объект, над которым проводим эксперименты, по параллельно имеем имитационную модель, на которой проводим те же эксперименты, измеряем ее реакцию на те же воздействия, но мы можем изменить значения параметров имитационной модели. Сопоставим результаты откликов модели и реального объекта, и, если цель недостигнута, то меняем параметры имитационной модели, до тех пор, пока не получим полное совпадение откликов Y и Y1(Рисунок 4.)
Тогда полученное значение параметра и будем считать оценкой параметра объекта.
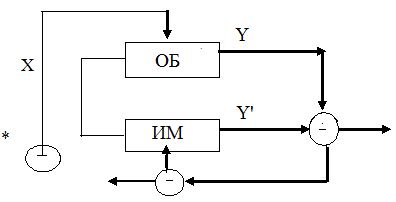
Рисунок 4.17
Здесь ИМ – имитационная модель, ОБ – натуральный объект управления.
Как видно их предыдущего в идентификации эксперимент является ключевой фигурой – это плата за точность и адекватность построения модели. Учитывая, что ОУ полной и большой системой, число циклов эксперимента может быть неоправданно велико. Поставленная задача планирования эксперимента с целью сокращения испытаний является ключевой для инженеров и экономистов.
Разработаны радикальные методы сокращения числа экспериментов в математической теории эксперимента, которые являются приложением математической статистики. Число экспериментов можно сократить в 106 раз, при сохранении качества эксперимента. Рассмотрим обобщенную схему идентификации St в которой используются введенные выше модельные представления и формализуется идея адаптации, как разностной схемы:
|
|
Пусть задана идентификация St(F- оператор модели известен). Нужноопределить неизвестные параметры модели:
 – состояние модели
– состояние модели 
Х – состояние природы
U – управление воздействием

Рисунок 4.18

Для идентификации необходимо иметь информацию об изменении параметров входа и выхода модели
Y = F1(x, c)
В процессе идентификации (рис.4.18) используется данные априорного и апостериорного типа. Они образуют набор данных, который условно называем информацией.
I = <X, Y>
Таким образом, имеем: <St, I>
Процесс идентификации сводится к определению параметров с помощью статистики j, которая называется алгоритм идентификации.
Процесс носит явно адаптационный характер

Рисунок 4.19
Ci+1 = Ci + j [F (xi+1, Ci), Ii+1]
Эта система работает для случайных стационарных (стохастические имитационные модели) и для динамических систем.
В простейшем случае процедуру адаптации можно заменить классической схемой системы из n функций с к неизвестными, (n>k)

Такая система уравнений решается методом наименьших квадратов. Минимизируемая функция суммарной невязки.

Опыт идентификация моделей объектов управления в современном призводстве дает надежду успешности идентификации объектов управления в экономике и техносферной безопасности.
Синтез алгоритма управления
Это выбор способов, алгоритмов и методов формирования алгоритма управляющего воздействия. Для реализации этого этапа необходимо иметь модель объекта F (x, u).
Состояние среды <x>
целей управления Z*
Процедуру получения U* называют алгоритмом управления.
<X, Y, Z*>
С помощью управления требуется изменить состояние объекта Y = F (x, u)
Цель математически формулируется следующим образом, сводится к выполнению целевых отношений:
Yi (x, y) = ai
Z*: Yj (x, y) ³ bj (функции ограничения)
Ye (x, y) ® min (функция качества)
Функции Yi, Yj, Ye, ai, bj должны быть заданы на стадии формирования целей управления.
H (x,y) ³ 0
Z*: G (x, y) = 0
Q (x,y) ® min
G – функция ограничивающего типа равенств
H – – “– неравенств
Q – функция качества
Реализовать поставленные условия можно только за счет соответствующего изменения Y. Это означает, что их выполнение возможно только при соответствующем выборе управления. Состояние среды X изменяется независимо от нас.
|
|
С точки зрения математическая задача управления сводится к решению следующей экстремальной задачи:
Q (x, y) ® min

H (x,y) ³ 0
W: G (x, y) =0
Y (x,y) ® min
Это означает, что мы хотим min Q, путем подбора соответствующего U, но при этом должно быть выполнено условие W.
Вся суть инженерной творческой работы сводится в любом случае к решению этой задачи.
В современной теории делаются попытки с помощью выше названного формализма с учетом предыдущих этапов описать алгоритмы управления сложными техническими, экономическими, медицинскими и экологическими системами. Полный формализм был с успехом применен во всех отраслях инженерии и управления производством.
Теория управления разбивается на 2 раздела: управление статическим объектом Y=F (x, y); управление динамическим объектом Y=F (x, y, t)
Введем классификацию задач теории управления.
1.Статическая задача называется задачей математического программирования.
Если F – линейное, то имеем задачу линейного математического программирования.
Задача линейного программирования успешно решается в случае транспортных задач, некоторых задач экономики.
Если F – нелинейное, то имеем задачу нелинейного программирования. К ним относятся многие задачи строительства и задачи теории связи и радиолокации, дистанционного зондирования.
2.Динамическое программирование.
Три раздела:
1. Пошаговое динамическое программирование, метод Беллмана.
2. Метод Потрягина.
Метод 1 и 2 предполагает определенное ужесточение на систему неравенств и на вид модели, поэтому встает проблема сведения реальных физических объектов и их математических моделей к моделям 1 и 2. Это осуществляется с помощью теории дифференциальных, интегральных уравнений и ряда современных разделов математики включающих теорию категорий, алгебраическую топологию.
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!