

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Оптимизация контура регулирования тока возбуждения в системе двухзонного подчиненного регулирования скорости
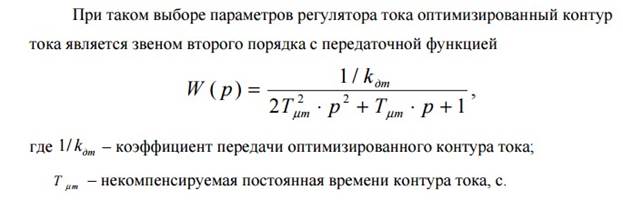
Оптимизация контура регулирования тока Для обеспечения форсировки в прямом канале управления контура системы подчиненного управления обязательно присутствие интегрирующего звена. Поэтому регулятор тока выбирается интегро-пропорциональным (ИП) с передаточной функцией,
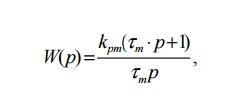
где рт k – коэффициент передачи; т τ - постоянная времени регулятора тока, с. При наиболее часто применяющей настройке контура тока по модульному оптимуму постоянную времени регулятора тока т τ принимают равной «большой» постоянной времени
Оптимизация контура регулирования ЭДС в системе двухзонного подчиненного регулирования скорости

Изменение потоковзбуждения влияет на измеение эдс и изменение Мдв Uдв и т.д. т.е.реально по изменению эдс учавствует весь прямой канал. Учесть это влияние не представляет возможным. Однако можно выделить цепь прохождения сигнала наиболеее быстрореагирующему на изменение магнитного потока иисходит из того что Δl=KΔФwn
Такое пренебрежение остальными составляющими Δl будет достаточно обоснованным если момент инерции двигателя достаточно большой. В полученном контуре регулиования эдс кроме малоц инериоанальности содержит передаточную функцию ОУ: Коб=Wв/rв*kWном
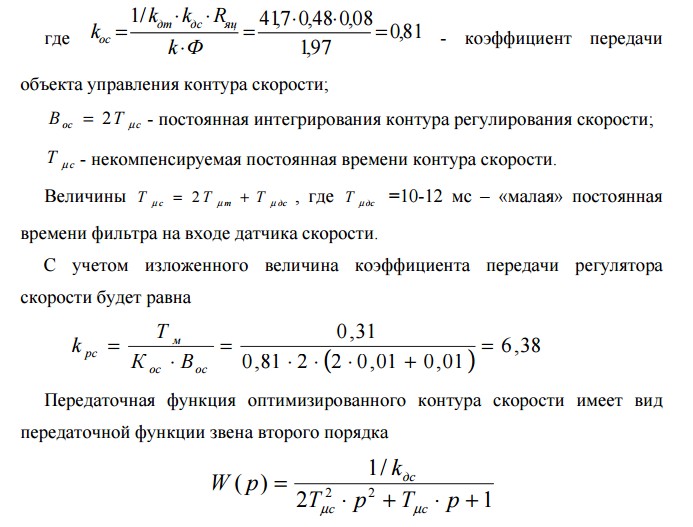
4.Особенности оптимизации контура регулирования скорости в системе двухзонного подчиненного регулирования скорости 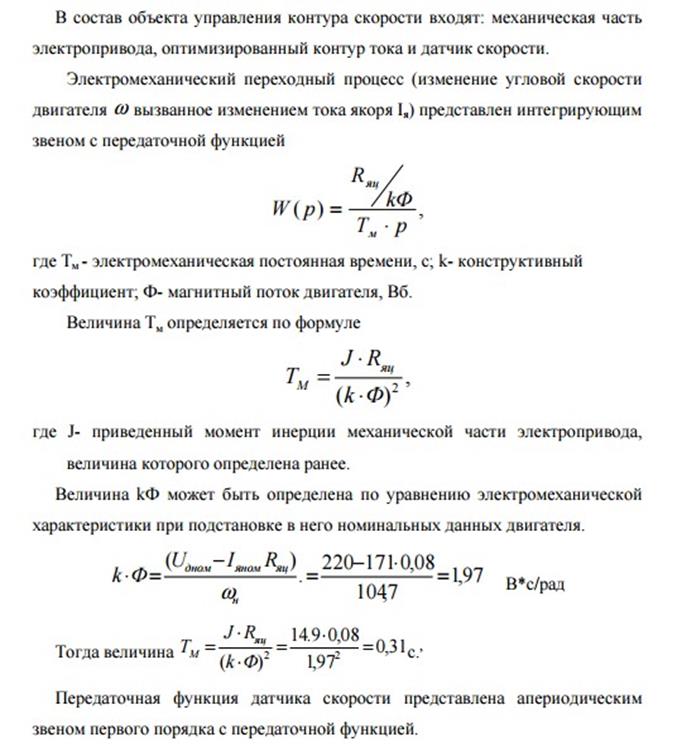
Восстановление координат электропривода с помощью наблюдателя.
|
|
Наибольшее распространение получили наблюдатели, в основу структуры которых положена модель объекта. В то время как в объекте измерение переменных состояния не всегда возможно, модель может быть построена таким образом, что допускает непосредственное измерение всех переменных состояния. Если на модель подать такой же сигнал, что поступает на вход объекта, значения переменных состояния объекта и модели должны в каждый момент времени совпадать, если на объект не действуют возмущения. При наличии внешних или внутренних возмущений имеет место ошибка наблюдения, для уменьшения которой используется информация о выходной величине.
Наблюдатель, восстанавливающий все переменные состояния, называется наблюдателем полного порядка. Он описывается системой дифференциальных уравнений того же порядка, что и объект. Редуцированным называется наблюдатель, восстанавливающий лишь часть переменных состояния на основании доступных для измерения переменных.
Система управления положением в режиме точного позиционирования. Требования к статической точности и динамике
Основная задача такой системы перемещения РО из одной тачки в другую за минимальное время, при этом траектория значения не имеет. При этом следует учитывать ограничения накладываемые на промежуточные величины (ток напряжение скорость). Для того чтобы система обеспечивала точное позиционирование в заданной точке необходимо настроить управление устройством таким образом, чтобы все промежуточные координаты в точке позиционирования стали равны нулю. Оптимальная по быстродействию отработка перемещений должна осуществляться при максимально возможном ускорении и скорости т. Е. систем должна работать с ограничением. Задача управления определить точку, в которой следует начать торможение с максимальным замедлением. Различают 3 режима работы системы перемещения 1 Отработка малого перемещения. За время перемещения ни скорость ни ток не достигают максимального значения.2 отработка средних перемещений. Ток и момент успевают достигнуть максимального значения а скорость нет. 3 отработка больших перемещения. При таком перемещении и скорость и ток достигают своего максимума.
|
|
Главное требование к САУ ЭП - обеспечение заданных статических и динамических характеристик, при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП.
Оптимизация контура регулирования тока возбуждения в системе двухзонного подчиненного регулирования скорости
Оптимизация контура регулирования тока Для обеспечения форсировки в прямом канале управления контура системы подчиненного управления обязательно присутствие интегрирующего звена. Поэтому регулятор тока выбирается интегро-пропорциональным (ИП) с передаточной функцией,
где рт k – коэффициент передачи; т τ - постоянная времени регулятора тока, с. При наиболее часто применяющей настройке контура тока по модульному оптимуму постоянную времени регулятора тока т τ принимают равной «большой» постоянной времени
|
|
|

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!