

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТЫ РЫЧАЖНЫХ МЕХАНИЗМОВ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к контрольной работе
по дисциплине «Теория механизмов и машин»
для студентов всех специальностей и направлений заочной формы обучения
Тюмень
ТИУ
Утверждено редакционно-издательским советом
Тюменского индустриального университета
Составители: доцент, к.т.н. Никитина Любовь Ивановна
© Федеральное государственное бюджетное образовательное учреждение высшего образования
«Тюменский индустриальный университет», 2016 г.
Содержание
| Введение | ............................................................................4 |
| Задания для контрольной работы | ............................................................................4 |
| Задача №1 | ............................................................................4 |
| Структурные схемы рычажных механизмов | ............................................................................5 |
| Указания к выполнению задачи №1 | ............................................................................7 |
| Структурный анализ рычажных механизмов | ............................................................................7 |
| Алгоритм проведения структурного анализа | ............................................................................8 |
| Пример решения задачи №1 | ............................................................................8 |
| Задача №2 | ............................................................................11 |
| Схемы кривошипно-ползунных механизмов | ............................................................................12 |
| Числовые данные для задачи №2 | ............................................................................15 |
| Указания к выполнению задачи №2 | ............................................................................15 |
| Пример решения задачи №2 | ............................................................................16 |
| Правила оформления контрольной работы | ............................................................................27 |
| Список литературы | ............................................................................28 |
| Приложение 1 | ............................................................................29 |
| Приложение 2 | ............................................................................30 |
ВВЕДЕНИЕ
|
|
Теория механизмов и машин является одной из важнейших дисциплин в подготовке инженеров. При изучении в вузах данной дисциплины ставятся следующие основные задачи:
· Научить студентов общим методам метрического, кинематического и силового расчета механизмов и машин;
· Научить студентов решать задачи синтеза механизмов, т. е. проектирования механизмов, удовлетворяющих заранее поставленным требованиям, и нахождению оптимальных параметров механизмов по заданным условиям работы.
Студенты при изучении дисциплины «Теория механизмов и машин» сталкиваются с трудностями при освоении материала в связи с высокой насыщенностью его формулами, чертежами, графиками. При этом студенты должны уметь использовать ранее изученные дисциплины: высшую математику, физику, теоретическую механику, инженерную графику, информатику. Это необходимо, чтобы осуществлять переход от рассмотрения абстрактного, общего - к конкретному. Например, от материальной точки и абсолютно твердого тела - к звену механизма, от системы твердых тел - к механизму в целом, от дифференциальных уравнений движения материальной точки - к движению механической системы.
Методические указания предназначены для студентов заочной формы обучения для самостоятельной работы при изучением дисциплины «Теория механизмов и машин».
В методических указаниях приведены задания для контрольной работы, рекомендации по выполнению контрольной работы, примеры решения задач и требования к оформлению контрольной работы.
ЗАДАНИЯ ДЛЯ КОНТРОЛЬНОЙ РАБОТЫ
ЗАДАЧА №1
Задание
1.Выполнить структурный анализ рычажного шестизвенника.
Предлагается
· 10 вариантов структурных схем рычажных шестизвенников (таблица 1).
Студент выбирает структурную схему по последней цифре зачетной книжки.
|
|
УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЗАДАЧИ №1
СТРУКТУРНЫЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Задачей структурного анализа рычажных механизмов является определение параметров структуры заданного механизма:
· числа и вида звеньев,
· числа и вида кинематических пар,
· определение степени подвижности механизма,
· разбиение механизма на группы Ассура и их анализ,
· выделение начального механизма, его анализ,
· определение класса всего механизма.
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ №1
Выполнить структурный анализ механизма
Решение
Структурная схема механизма качающегося конвейера

Рис.1 Структурная схема механизма качающегося конвейера
Звенья механизма
Таблица 2
| Звено | Наименование | Подвижность | Число подвижных звеньев |
| Кривошип | Подвижное | n=5 | |
| Шатун | Подвижное | ||
| Коромысло | Подвижное | ||
| Шатун | Подвижное | ||
| Ползун | Подвижное | ||
| Стойка | Неподвижное |
Кинематические пары
Таблица 3
| Обозначение на структурной схеме | Соединяемые звенья | Вид | Тип кинематической пары | Индекс | |
| Характер соприкосновения | Степень подвижности | ||||
| О1 | 1,6 | Вращат. | Низшая | Одноподвижная | 
|
| А | 1,2 | Вращат. | Низшая | Одноподвижная | ВA(1,2) |
| В | 2,3 | Вращат. | Низшая | Одноподвижная | ВB(2,3) |
| В | 3,4 | Вращат. | Низшая | Одноподвижная | ВВ(3,4) |
| С | 4,5 | Вращат. | Низшая | Одноподвижная | ВC(4,5) |
| С | 5,6 | Поступат. | Низшая | Одноподвижная | ПС(5,6) |
| О2 | 3,6 | Вращат. | Низшая | Одноподвижная | 
|
Число одноподвижных кинематических пар  , число двухподвижных кинематических пар
, число двухподвижных кинематических пар  .
.
Строение групп Ассура
Последняя группа Асcура
 В состав последней группы Ассура входит две вращательные кинематические пары В и одна поступательная – П. Следовательно, группа Ассура имеет вид ВВП.
В состав последней группы Ассура входит две вращательные кинематические пары В и одна поступательная – П. Следовательно, группа Ассура имеет вид ВВП.
Рис.2.Последняя группа Асcура
В группу Ассура входит два подвижных звена и три кинематические пары. Следовательно, группа Ассура имеет II класс.
Число внешних пар, которыми группа присоединяется к не относящимся к ней звеньям механизма или стойке, называют порядком группы. Все группы Ассура П класса являются группами второго порядка. Следовательно, последняя группа Ассура имеет 2 порядок.
Степень подвижности группы Ассура:
 .
.
Структурная формула:
|
|

Предпоследняя группа Ассура
 В состав предпоследней группы Ассура входит три вращательные кинематические пары В. Следовательно, группа Ассура имеет вид ВВВ.
В состав предпоследней группы Ассура входит три вращательные кинематические пары В. Следовательно, группа Ассура имеет вид ВВВ.
II класс, 2 порядок (определяются, как для последней группы Ассура).
Степень подвижности группы Ассура
.
Рис.3.Предпоследняя группа Асcура
Структурная формула:

ЗАДАЧА №2
Задание
1.По заданным размерам построить кинематическую схему механизма в расчетном положении, которое определяется углом φ (см. табл.5).Угол φ откладывается в направлении угловой скорости ω1 от линии О-О (см. схему механизма в табл.4).
2.Определить скорости точек А, В и С. Для этого построить план скоростей.
3.Определить угловую скорость ω2 звена 2. Указать на схеме направление ω2 круговой стрелкой.
4.Определить ускорения точек А, В, С, S1, S2, S3. Для этого построить план ускорений.
(Точки S1, S2, S3 - центры масс звеньев. Находятся на серединах полных длин соответствующих звеньев. Для ползуна 3 точки В и S3 совпадают).
5.Определить угловое ускорение ε2 звена 2. Указать на схеме направление ε2 круговой стрелкой.
6.Определить реакции в кинематических парах от действия сил тяжести и инерционных нагрузок без учета рабочей нагрузки.
7.Определить уравновешивающий момент.
Предлагается:
· 10 вариантов схем кривошипно-ползунных механизмов (табл.4);
· каждая схема содержит 10 вариантов числовых данных (табл.5).
Студент выбирает задачу по двум последним цифрам зачетной книжки:
· номер схемы – по последней цифре зачетной книжки;
· числовые данные из таблицы — по предпоследней цифре зачетной книжки.
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ №2
Дано:
Угловая скорость кривошипа является постоянной и равна  .
.
Размеры звеньев:
ОА = 20 мм, АВ = 76 мм, AС = 26 мм.
Для расчета используются формулы, приведенные в приложении 1.
Решение
Определение масс звеньев.
 кг
кг

Определение силы инерции
 =
=  Н,
Н,  =
=  Н.
Н.
Силы инерции направлены в противоположную сторону соответствующим ускорениям центров масс звеньев.
Определение момента инерции
 =
=  Н·м;
Н·м;
Момент инерции направлен в противоположную сторону угловому ускорению  , т.е. по часовой стрелке.
, т.е. по часовой стрелке.
|
|
Построим группу Ассура в масштабе  м/мм. (рис.4). Покажем все действующие на нее силы и неизвестные реакции
м/мм. (рис.4). Покажем все действующие на нее силы и неизвестные реакции  ,
,  ,
,  ,
,  .
.
3.6. Определение реакции .
Составим уравнение моментов всех сил, действующих на звено 2, относительно точки В.
 ;
;  .
.
Найдем реакцию  :
:

Длины плеч h1 и h2 измерены на расчетной схеме и умножены на масштабный коэффициент м/мм.
 м,.
м,.  м.
м.
3.7. Определение реакций  и
и  .
.
Составим векторное уравнение равновесия всех сил, действующих на всю группу Ассура.
 .
.
 .
.
Выберем масштаб плана сил  Н/мм.
Н/мм.
Вычислим величины отрезков, соответствующих векторам сил (разделим величины сил на масштаб  ). Данные занесем в таблицу 8.
). Данные занесем в таблицу 8.
Строим план сил (рис.4). В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам  . Векторы можно откладывать в любом порядке, но обязательно начать построение с вектора
. Векторы можно откладывать в любом порядке, но обязательно начать построение с вектора  . Отложив все известные векторы, из начала вектора проводим направление вектора
. Отложив все известные векторы, из начала вектора проводим направление вектора  , а из конца последнего вектора
, а из конца последнего вектора  проводим направление вектора
проводим направление вектора  . Пересекаясь, эти направления замыкают многоугольник сил.
. Пересекаясь, эти направления замыкают многоугольник сил.
Измеряя на плане сил отрезки, соответствующие векторам  , , и умножая их на масштаб
, , и умножая их на масштаб  , получим значение этих реакций. Данные занесены в таблицу 8.
, получим значение этих реакций. Данные занесены в таблицу 8.
3.8. Определим реакцию  .
.
Составим векторное уравнение равновесия всех сил, действующих звено 2.
 ,
, 
Выберем масштаб плана сил mF=0,03  .
.
Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам  . Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 8. Реакция
. Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 8. Реакция  .
.
Таблица 8
| Обозначение силы | 
| 
| 
| 
|
| 
| 
|
|
|
| Величина силы, Н | 0,799 | 1,599 | 1,27 | 2,2 | 0,27 | 3,33 | 3,36 | 1,14 | 2,22 |
| Отрезок на плане, мм |
Определение массы кривошипа
 кг.
кг.
Определение силы инерции
 =
=  Н.
Н.
Сила инерции направлена в противоположную сторону ускорению  .
.
Построим начальный механизм в масштабе м/мм.
Покажем все действующие на него силы, неизвестную реакцию  и уравновешивающий момент
и уравновешивающий момент  .
.
Группа Ассура вида ВВП м/мм

План сил для группы Ассура вида ВВП Н/мм
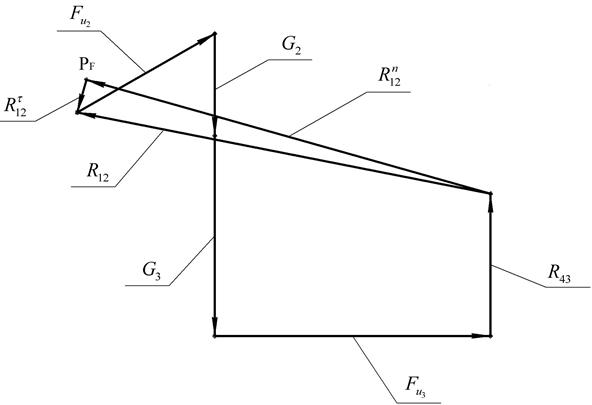
Рис.4. Построение плана сил для группы Ассура
План сил для звена 2 Н/мм

Рис.5. Построение плана сил для звена 2
4.4. Определение уравновешивающего момента Мур
Запишем уравнение моментов всех сил относительно точки О.


Уравновешивающий момент равен:

Здесь  .
.
Длины плеч h3 и h4 измерены на расчетной схеме и умножены на масштабный коэффициент м/мм.
 м,
м,  м.
м.
4.5. Определение реакцию R41
Составим векторное уравнение равновесия всех сил, действующих на начальный механизм.
|
|
 .
.
 .
.
Выберем масштаб плана сил  Н/мм.
Н/мм.
Вычислим величины отрезков, соответствующих векторам сил. Данные занесем в таблицу 9.
Строим план сил (рис.5). В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам  . Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию
. Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию  . Измеряя его длину и умножая на масштаб
. Измеряя его длину и умножая на масштаб  , получим величину реакции . Данные занесены в таблицу 9.
, получим величину реакции . Данные занесены в таблицу 9.
Таблица 9
| Обозначение силы | 
| 
| 
| 
|
| Величина силы, Н | 0,157 | 0,144 | 3,36 | 2,1 |
| Отрезок на плане, мм |
Начальный механизм  м/мм.
м/мм.

План сил для начального механизма Н/мм.
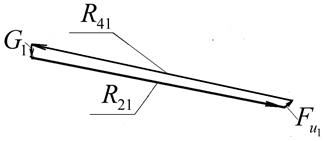
Рис.5. Построение плана сил для начального механизма
5. Правила оформления контрольной работы
Пояснительная записка
Пояснительная записка – документ, содержащий, все виды расчетов, схемы, таблицы, поясняющие расчеты и принятые решения.
Пояснительная записка контрольной работы должна содержать:
1. Титульный лист (приложение 2);
2. Задание на контрольную работу;
3. Содержание;
4. Структурный анализ механизма;
5. Кинематический анализ механизма:
5.1. Определение скоростей точек звеньев и угловых скоростей звеньев;
5.2. Определение ускорений точек звеньев и угловых ускорений звеньев;
6. Силовой расчет механизма.
5.2. Общие требования к оформлению пояснительной записки
Текстовые документы контрольной работы должны быть сброшюрованы по ГОСТ 2.301-68. Титульный лист выполняется на бумаге формата А4 по ГОСТ 2.301-68 и должен соответствовать указанному ниже образцу. Текст записки должен быть набран в текстовом редакторе Microsoft Word. Шрифт пояснительной записки – Times New Roman, размер шрифта 12 с одинарным межстрочным интервалом. Выравнивание – по ширине. Ориентация страницы –книжная.
Текст записки пишется в рамку, образованную полями: левое – 20 мм, правое – 5 мм, верхнее – 5 мм, нижнее – 5 мм.
Заголовки всех разделов выделяют в отдельную строку и выполняют прописными буквами.
Очередной раздел необходимо начинать с новой страницы.
Раздел «Содержание» должен содержать названия разделов и подразделов с указанием страниц.
5.3. Правила оформления графических построений
1. Графические построения следует выполнять карандашом в соответствии с ГОСТ 2.105-95 и ГОСТ 2.106-96 на масштабно-координатной бумаге («миллиметровке»).
2. Все построения необходимо снабжать соответствующей им надписью и масштабным коэффициентом.
3. Масштабные коэффициенты построений следует выбирать так, чтобы площадь листа была максимально заполненной.
4. Кинематическая схема механизма:
4.1. В расчетном положении кинематическую схему механизма надо выполнять основными линиями, указать масштаб;
4.2. Кинематические пары следует обозначать заглавными буквами латинского алфавита, центры масс звеньев буквами «S» с индексами, соответствующими номеру звена;
4.3. Для расчетного положения механизма указывать номера звеньев и направления угловых скоростей и ускорений, полученные на основании расчетов.
5. Планы скоростей и ускорений:
5.1. Концы векторов скоростей (ускорений) точек механизма следует обозначать малыми буквами латинского алфавита в соответствии с буквами на плане механизма;
5.2. Направления абсолютных и относительных скоростей (ускорений) надо показывать стрелками.
6. Планы сил:
6.1. Группы Ассура следует выполнять в масштабе;
6.2. Векторы сил необходимо изображать в истинном направлении;
6.3. Каждый вектор надо снабжать соответствующим обозначением;
6.4. Планы сил необходимо строить в масштабе.
Список литературы
1. Артоболевский И.И. Теория механизмов и машин [Текст]: учебник для студентов втузов / И. И. Артоболевский. - 6-е изд., перераб. и доп. –
М.: Альянс, 2014. - 640 с.
2. Теория механизмов и машин [Текст]: учебное пособие для студентов вузов, обучающихся по машиностроительным специальностям / М.З. Коловский [и др.]. - М.: ИЦ Академия, 2013. - 559 с.
3. Тимофеев, Г.А. Теория механизмов и машин [Текст]: учебное пособие для бакалавров / Г.А. Тимофеев. - М.: Юрайт, 2013. - 351 c
4. Фролов, К.В. Теория механизмов и механика машин.Т.5.Механика в техническом университете. [Текст]: 7-е изд. / К.В. Фролов. - М.: МГТУ, 2012. – 686 с.
Дополнительная литература
5. Марголин Ш.Ф. Теория механизмов и машин (Теория, примеры, графические работы) [Текст]: учебное пособие для студентов-заочников механических специальностей технологических вузов / Ш. Ф. Марголин. - М.: Высшая школа, 1968. - 357 с.
Приложение 1
Основные формулы для определения скоростей и ускорений точек звеньев
| № | Вид движения | Скорость | Ускорение |
Поступательное движение
(ползун по стойке)

| Все точки звена имеют одинаковую скорость  , вектор который направлен вдоль траектории движения точки В. , вектор который направлен вдоль траектории движения точки В.
 IIХ-Х IIХ-Х
| Все точки звена имеют одинаковые ускорения  . Если вектор ускорения . Если вектор ускорения  направлен в сторону направлен в сторону  , то движение ускоренное, если вектор ускорения , то движение ускоренное, если вектор ускорения  направлен в противоположнyю сторону , то движение замедленное. направлен в противоположнyю сторону , то движение замедленное.
 II Х -Х II Х -Х
| |
Вращательное движение вокруг неподвижной оси
(кривошип или коромысло относительно стойки)

| Скорость точки А
 Вектор
Вектор  направлен перпендикулярно ОА, в сторону угловой скорости направлен перпендикулярно ОА, в сторону угловой скорости  . .

| Полное ускорение точки А
 Нормальное ускорение
Нормальное ускорение  = =  Вектор
Вектор  направлен по радиусу АО к центру вращения О. направлен по радиусу АО к центру вращения О.
 II OA.
Касательное ускорение II OA.
Касательное ускорение  Вектор
Вектор  направлен перпендикулярно АО направлен перпендикулярно АО 
| |
Плоскопараллельное движение
(шатун)

| Скорость точки В
 Относительная скорость точки В относительно точки А
Относительная скорость точки В относительно точки А
 Вектор
Вектор  направлен перпендикулярно к ВА в сторону угловой скорости направлен перпендикулярно к ВА в сторону угловой скорости  . .

| Ускорение точки В
 Относительное ускорение
точки В относительно точки А
Относительное ускорение
точки В относительно точки А
 Нормальное ускорение
Нормальное ускорение
 = =  Вектор
Вектор  направлен параллельно АВ (от точки В к точке А) направлен параллельно АВ (от точки В к точке А)
 II АВ
Касательное ускорение II АВ
Касательное ускорение
 Вектор
Вектор  направлен перпендикулярно АВ направлен перпендикулярно АВ
  ВА ВА
|
 Приложение 2
Приложение 2
 |
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Тюменский индустриальный университет»
Институт транспорта
Кафедра прикладной механики
КОНТРОЛЬНАЯ РАБОТА
по дисциплине «Теория механизмов и машин»
Варианты: задача №1 - 5
задача №2 - 5-3
задача №3 - 5-3
Выполнил: студент группы ЭОТбзу-15-1
Иванов А.С.
Проверил: к.т.н., доцент Никитина Л.И.
Тюмень, 2016 г.
Рычажных механизмов
Методические указания к контрольной работе
по дисциплине «Теория механизмов и машин»
для студентов всех специальностей и направлений заочной формы обучения
Составители: доцент, к.т.н. Никитина Любовь Ивановна
Подписано в печать __________ Формат 60/90 1/16 Усл. печ. л. ______ _
Тираж 45 экз. Заказ № _________ _
Библиотечно издательский комплекс
федерального государственного бюджетного образовательного учреждения высшего образования
«Тюменский индустриальный университет
625000, г.Тюмень, ул.Володарского, 38.
Типография библиотечно издательского комплекса
625039, г.Тюмень, ул. Киевская, 52
СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТЫ РЫЧАЖНЫХ МЕХАНИЗМОВ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к контрольной работе
по дисциплине «Теория механизмов и машин»
для студентов всех специальностей и направлений заочной формы обучения
Тюмень
ТИУ
Утверждено редакционно-издательским советом
Тюменского индустриального университета
Составители: доцент, к.т.н. Никитина Любовь Ивановна
© Федеральное государственное бюджетное образовательное учреждение высшего образования
«Тюменский индустриальный университет», 2016 г.
Содержание
| Введение | ............................................................................4 |
| Задания для контрольной работы | ............................................................................4 |
| Задача №1 | ............................................................................4 |
| Структурные схемы рычажных механизмов | ............................................................................5 |
| Указания к выполнению задачи №1 | ............................................................................7 |
| Структурный анализ рычажных механизмов | ............................................................................7 |
| Алгоритм проведения структурного анализа | ............................................................................8 |
| Пример решения задачи №1 | ............................................................................8 |
| Задача №2 | ............................................................................11 |
| Схемы кривошипно-ползунных механизмов | ............................................................................12 |
| Числовые данные для задачи №2 | ............................................................................15 |
| Указания к выполнению задачи №2 | ............................................................................15 |
| Пример решения задачи №2 | ............................................................................16 |
| Правила оформления контрольной работы | ............................................................................27 |
| Список литературы | ............................................................................28 |
| Приложение 1 | ............................................................................29 |
| Приложение 2 | ............................................................................30 |
ВВЕДЕНИЕ
Теория механизмов и машин является одной из важнейших дисциплин в подготовке инженеров. При изучении в вузах данной дисциплины ставятся следующие основные задачи:
· Научить студентов общим методам метрического, кинематического и силового расчета механизмов и машин;
· Научить студентов решать задачи синтеза механизмов, т. е. проектирования механизмов, удовлетворяющих заранее поставленным требованиям, и нахождению оптимальных параметров механизмов по заданным условиям работы.
Студенты при изучении дисциплины «Теория механизмов и машин» сталкиваются с трудностями при освоении материала в связи с высокой насыщенностью его формулами, чертежами, графиками. При этом студенты должны уметь использовать ранее изученные дисциплины: высшую математику, физику, теоретическую механику, инженерную графику, информатику. Это необходимо, чтобы осуществлять переход от рассмотрения абстрактного, общего - к конкретному. Например, от материальной точки и абсолютно твердого тела - к звену механизма, от системы твердых тел - к механизму в целом, от дифференциальных уравнений движения материальной точки - к движению механической системы.
Методические указания предназначены для студентов заочной формы обучения для самостоятельной работы при изучением дисциплины «Теория механизмов и машин».
В методических указаниях приведены задания для контрольной работы, рекомендации по выполнению контрольной работы, примеры решения задач и требования к оформлению контрольной работы.
ЗАДАНИЯ ДЛЯ КОНТРОЛЬНОЙ РАБОТЫ
ЗАДАЧА №1
Задание
1.Выполнить структурный анализ рычажного шестизвенника.
Предлагается
· 10 вариантов структурных схем рычажных шестизвенников (таблица 1).
Студент выбирает структурную схему по последней цифре зачетной книжки.
|
|
|

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!