Задание рекомендуется выполнять в следующей последовательности:
- составляется формализованное описание (алгоритм) функционирования объекта автоматизации на основании задания и принятой схемы компоновки элементов объекта (в схеме должно быть учтено не менее пяти элементов);
- составляется циклограмма работы объекта автоматизации в соответствии с формализованным описанием функционирования и строится таблица включений, которая проверяется на повторяемость тактов, т.е. на ее реализуемость;
- в случае повторяемости тактов строится новая таблица включений, в которую вводится необходимое количество элементов памяти (как правило, не более двух) для устранения повторяемости тактов и, соответственно, обеспечения ее реализуемости;
- по реализуемой таблице включений осуществляется минимизация логических функций управления для всех тактов по методу логического подбора и проверка минимизации по методу карт Карно (минимальные выражения логических функций, полученных при минимизации разными методами должны полностью совпадать);
- по минимизированным логическим функциям строится структурная схема управления, совмещенная с принятой схемой компоновки элементов объекта автоматизации.
Рассмотрим метод синтеза цикловых цифровых САУ на примере.
Задание: синтезировать цифровую САУ промышленным манипулятором, который осуществляет загрузку деталей из магазина в станок и их разгрузку в накопитель после обработки. Учесть, что манипулятор имеет две степени подвижности (поворот колонны и перемещение руки) и захватное устройство клещевого типа с пневмоприводом. В САУ предусмотреть блокировку на наличие деталей в магазине и блокировку, фиксирующую завершение обработки детали и остановку станка. Схема компоновки приводов промышленного манипулятора, для которого необходимо синтезировать цифровую САУ, приведена на рисунке 1.
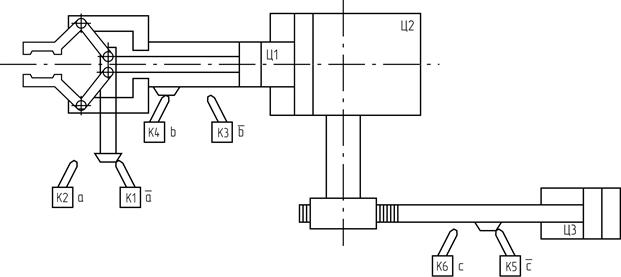
Рисунок 1
Исполнительными устройствами манипулятора служат пневматические цилиндры (Ц1, Ц2, Ц3). Цилиндр Ц1 при вдвижении штока производит зажим детали посредством захвата, что контролируется конечным выключателем К1, выходной сигнал которого  . Разжим захвата контролируется К2 – сигнал
. Разжим захвата контролируется К2 – сигнал  . Цилиндр Ц2 перемещает руку манипулятора. Исходное положение его штока контролируется К3 с выходным сигналом
. Цилиндр Ц2 перемещает руку манипулятора. Исходное положение его штока контролируется К3 с выходным сигналом  , конечное, выдвинутое – К4 с выходным сигналом
, конечное, выдвинутое – К4 с выходным сигналом  . Цилиндр Ц3 при выдвижении штока посредством реечно-зубчатой передачи осуществляет поворот руки к станку, что контролируется К6 с выходным сигналом
. Цилиндр Ц3 при выдвижении штока посредством реечно-зубчатой передачи осуществляет поворот руки к станку, что контролируется К6 с выходным сигналом  и обратный ход – К5, сигнал
и обратный ход – К5, сигнал  .
.
Цикл работы манипулятора осуществляется следующим образом. При получении сигнала о начале цикла происходит захват и зажим детали, находящейся в магазине-накопителе, для чего шток цилиндра Ц1 должен вдвинуться и нажать на конечный выключатель К1. После этого шток цилиндра Ц2 вдвигается, осуществляя отвод руки манипулятора, при этом включается К3. Далее происходит поворот руки к станку, для чего шток цилиндра Ц3 выдвигается, включая К6. После завершения поворота выдвигается шток цилиндра Ц2, осуществляя перемещение руки в сторону станка, при этом срабатывает К4. Затем происходит выдвижение штока цилиндра Ц1, в конце которого включается К2, при этом осуществляется разжим детали и ее загрузка в станок. На время обработки детали происходит отвод руки, что осуществляется вдвижением штока цилиндра Ц2, одновременно включающим К3, а после обработки – ее подвод посредством выдвижения штока цилиндра Ц2, что контролируется блокировкой  и К4. Обработанная деталь зажимается захватом, при этом вдвигается шток цилиндра Ц1 и включает К1. Рука с зажатой обработанной деталью отводится от станка, для этого вдвигается шток цилиндра Ц2 и включает К3. Далее происходит поворот руки в исходное положение посредством вдвижения штока цилиндра Ц3, который в конце хода включает К5. Затем происходит выдвижение штока цилиндра Ц1, при этом происходит разжим детали и ее разгрузка в тару для готовых изделий, что контролируется К2. После этого выдвигается шток цилиндра Ц2, включает К4 и перемещает руку манипулятора к магазину-накопителю за новой деталью.
и К4. Обработанная деталь зажимается захватом, при этом вдвигается шток цилиндра Ц1 и включает К1. Рука с зажатой обработанной деталью отводится от станка, для этого вдвигается шток цилиндра Ц2 и включает К3. Далее происходит поворот руки в исходное положение посредством вдвижения штока цилиндра Ц3, который в конце хода включает К5. Затем происходит выдвижение штока цилиндра Ц1, при этом происходит разжим детали и ее разгрузка в тару для готовых изделий, что контролируется К2. После этого выдвигается шток цилиндра Ц2, включает К4 и перемещает руку манипулятора к магазину-накопителю за новой деталью.
Далее цикл повторяется.
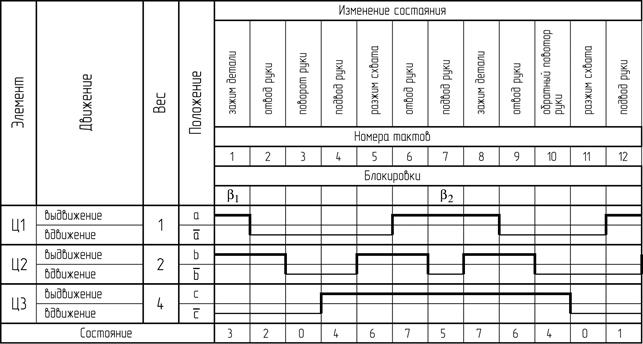
Циклограмма работы манипулятора показана на рисунке 2. Каждому элементарному приводу на циклограмме соответствует строка, в которой проводятся горизонтальные линии по числу положений привода, фиксируемых конечными выключателями. Положению, когда шток выдвинут из цилиндра, в рассматриваемом примере соответствует верхняя линия, когда вдвинута - нижняя. Перемещение рабочего органа отмечается вертикальными переходными линиями. Неподвижное положение рабочего органа в одном из положений, фиксируемых конечным выключателем, изображается сплошной горизонтальной линией на соответствующем уровне: тонкой, когда шток вдвинут; толстой, когда шток выдвинут. Цикл условно разбивается на такты. За границы тактов принимают моменты, в которых происходят какие-либо изменения в состоянии приводов: начало движения рабочих органов, их переключение и т.п.
Рисунок 2
Основной особенностью циклограммы является последовательное выполнение тактов: движение в очередном такте начинается лишь после того, как закончатся все перемещения в предыдущем такте, что контролируется с помощью конечных выключателей.
Реализация циклограммы связана также с введением в некоторые моменты цикла блокировок, причем при выполнении условий блокировки сигнал  , при невыполнении –
, при невыполнении –  . Блокировки, которые проверяются в начальные моменты такта, называются разрешающими, остальные – подтверждающими. Если разрешающая блокировка выполняется, то наступает следующий такт, если нет, то такт не наступает и рабочие органы остаются неподвижными.
. Блокировки, которые проверяются в начальные моменты такта, называются разрешающими, остальные – подтверждающими. Если разрешающая блокировка выполняется, то наступает следующий такт, если нет, то такт не наступает и рабочие органы остаются неподвижными.
В рассматриваемом примере блокировка  является разрешающей для начала второго такта, блокировка - для восьмого такта. Проверка блокировки не позволяет начать цикл, если отсутствуют детали в магазине, т.е. предотвращает холостую работу манипулятора. Проверка блокировки позволяет избежать аварии из-за возможности захвата детали в станке во время ее обработки. Эта блокировка выполняется, если деталь уже обработана и неподвижна.
является разрешающей для начала второго такта, блокировка - для восьмого такта. Проверка блокировки не позволяет начать цикл, если отсутствуют детали в магазине, т.е. предотвращает холостую работу манипулятора. Проверка блокировки позволяет избежать аварии из-за возможности захвата детали в станке во время ее обработки. Эта блокировка выполняется, если деталь уже обработана и неподвижна.
Для каждой блокировки предусматривается специальная схема (датчик, реле времени и т.п.), которая выдает единичный сигнал при выполнении условия и нулевой – при его невыполнении.
При синтезе цифровой САУ по таблице включений (рисунок 2) рекомендуется пользоваться следующей методикой:
1. Определяются независимые входные каналы синтезируемого устройства:  соответствующие рабочим органам привода. Задаются значения сигналов. В рассматриваемом примере сигнал принимает значение «1», если шток цилиндра выдвинут и включен дальний конечный выключатель, и значение «0», когда шток вдвинут и включен ближний конечный выключатель.
соответствующие рабочим органам привода. Задаются значения сигналов. В рассматриваемом примере сигнал принимает значение «1», если шток цилиндра выдвинут и включен дальний конечный выключатель, и значение «0», когда шток вдвинут и включен ближний конечный выключатель.
2. В таблице включений проводятся толстые линии в тех интервалах циклограммы, где сигнал принимает единичное значение и тонкие где сигнал имеет нулевое значение.
3. Входным каналом в порядке следования строк сверху вниз присваиваются веса  .
.
4. Проверяется реализуемость таблицы включений. Для каждого такта определяется значение основного входа (сумма произведений весов каналов  на значение сигналов в них: 1 или 0), т.е. состояние входа. В рассматриваемом примере значение основного входа (состояния) в пятом такте равно
на значение сигналов в них: 1 или 0), т.е. состояние входа. В рассматриваемом примере значение основного входа (состояния) в пятом такте равно  , в шестом
, в шестом  и т.д.
и т.д.
Условием реализуемости таблицы служит различие значений основного входа (состояния) для всех тактов.
В данной таблице (рисунок 2) значения состояний в третьем и одиннадцатом, четвертом и десятом, пятом и девятом, шестом и восьмом тактах совпадают. Следовательно, таблица не реализуема.
5. Если таблица не реализуема, то последовательно вводятся элементы памяти  так, чтобы такты, совпадение которых не допустимо, различались за счет значения
так, чтобы такты, совпадение которых не допустимо, различались за счет значения  . Причем, для включения и выключения каждого элемента памяти в таблицу включений добавляются два такта. Каждому элементу памяти
. Причем, для включения и выключения каждого элемента памяти в таблицу включений добавляются два такта. Каждому элементу памяти  в таблице включений добавляется строка с двумя горизонтальными линиями, которые выполняются толстыми там, где
в таблице включений добавляется строка с двумя горизонтальными линиями, которые выполняются толстыми там, где  (память включена), и тонкими где
(память включена), и тонкими где  (память выключена).
(память выключена).
Первому элементу памяти присваивается вес  , после чего для всех тактов таблицы определяют новые значения весов (полное состояние). Если при этом в таблице все же остаются недопустимые совпадения, то вводят второй элемент памяти с весом
, после чего для всех тактов таблицы определяют новые значения весов (полное состояние). Если при этом в таблице все же остаются недопустимые совпадения, то вводят второй элемент памяти с весом  и повторяют описанную процедуру. Введение элементов памяти продолжают до тех пор, пока таблица не станет реализуемой. Как правило, достаточно не более двух элементов памяти (см. примечание).
и повторяют описанную процедуру. Введение элементов памяти продолжают до тех пор, пока таблица не станет реализуемой. Как правило, достаточно не более двух элементов памяти (см. примечание).
В рассматриваемом примере вводится элемент памяти П с весом 8. Для того, чтобы исключить возможность состязания сигналов, добавляются два такта. При этом таблица включений становится реализуемой (рисунок 3).
6. Определяются моменты переключения для всех триггеров, установленных на выходе логического элемента (устройства) и триггеров, выполняющих функции элементов памяти. Каждому триггеру отводится горизонтальная графа с двумя строками, верхняя из которых соответствует включающему (прямому) входу триггера, а нижняя – выключающему (инверсному) входу. Моменты включения триггера в строке включающего входа и моменты выключения в строке выключающего входа в соответствующем такте таблицы отмечаются крестиками (рисунок 3). В рассматриваемом примере в начале второго такта должен выключиться второй триггер, а в начале третьего такта должен включиться третий триггер, поэтому крестики проставляются в строках  и
и  , и т.д.
, и т.д.
Правильная работа триггеров в течении цикла обеспечивается, если выполняются два условия:
I – сигнал на выключающем входе каждого триггера  должен отсутствовать, т.е. значение соответствующего входа должно быть равно нулю, если на включающем входе каждого триггера имеется сигнал равный единице;
должен отсутствовать, т.е. значение соответствующего входа должно быть равно нулю, если на включающем входе каждого триггера имеется сигнал равный единице;
II – сигнал на включающем входе каждого триггера  должен отсутствовать, т.е. должен быть равным нулю, если на выключающем входе этого триггера имеется сигнал равный единице.
должен отсутствовать, т.е. должен быть равным нулю, если на выключающем входе этого триггера имеется сигнал равный единице.
Таким образом, одновременная подача логического сигнала «1» на оба входа недопустима, т.к. приводит к неопределенному состоянию и, как следствие, ложным срабатываниям триггера. При отсутствии логического сигнала «1» на обоих входах триггера, на одном из его выходов имеется единичный сигнал, который установился от ранее поданного на этот вход логического сигнала «1» и сохранился (запомнился) после снятия входного сигнала.
7. Для каждого триггера составляются логические функции включения и выключения. С этой целью для каждого крестика в соответствующей строке вначале определяют обязательный сигнал, который появляется в этом такте. Рядом в скобках записывают обозначения этого сигнала. Далее для выключающего входа проверяют условие I, для включающего – условие II п.6. Если условие не выполняется, то к обязательному сигналу с помощью логической операции И добавляют какой-либо из остальных сигналов и для полученного логического выражения снова проверяют это условие. Этот процесс продолжается до тех пор, пока условие не будет выполнено. Предельным случаем является выражение, в которое войдут все сигналы данного такта, при этом условие заведомо выполняется. Окончательное выражение выписывается в таблице рядом с соответствующим крестиком.
Длительность сигнала, соответствующего этому выражению, показывают в данной строке горизонтальной линией от крестика. Сигналы, которые дописаны к обязательному, входят в него без скобок.
Если в данной строке только один крестик, то логическая функция включения или выключения определяется полученным выражением. Если в строке несколько крестиков, которым соответствуют различные выражения, то для записи функций эти выражения следует соединить с помощью логической операции ИЛИ.
Для примера рассмотрим составление логических функций включения  и выключения
и выключения  для триггера
для триггера  (рисунок 3).
(рисунок 3).
В строке крестиком отмечено начало такта 1 и обязательным является сигнал  , который и в единичном интервале в тактах 5, 6, т.е. условие I не выполняется. добавляем к с помощью операции И сигнал и снова проверяем условие I. Интервал, в котором одновременно имеются
, который и в единичном интервале в тактах 5, 6, т.е. условие I не выполняется. добавляем к с помощью операции И сигнал и снова проверяем условие I. Интервал, в котором одновременно имеются  , соответствует только тактам 1 и 2, т.е. условие I выполняется. В этой же строке крестиком отмечено начало девятого такта, где обязательным также является сигнал . По тем же причинам необходимо добавить сигнал
, соответствует только тактам 1 и 2, т.е. условие I выполняется. В этой же строке крестиком отмечено начало девятого такта, где обязательным также является сигнал . По тем же причинам необходимо добавить сигнал  . Для сигнала
. Для сигнала  также выполняется условие I, т.к. он соответствует только тактам 9 и 10.
также выполняется условие I, т.к. он соответствует только тактам 9 и 10.
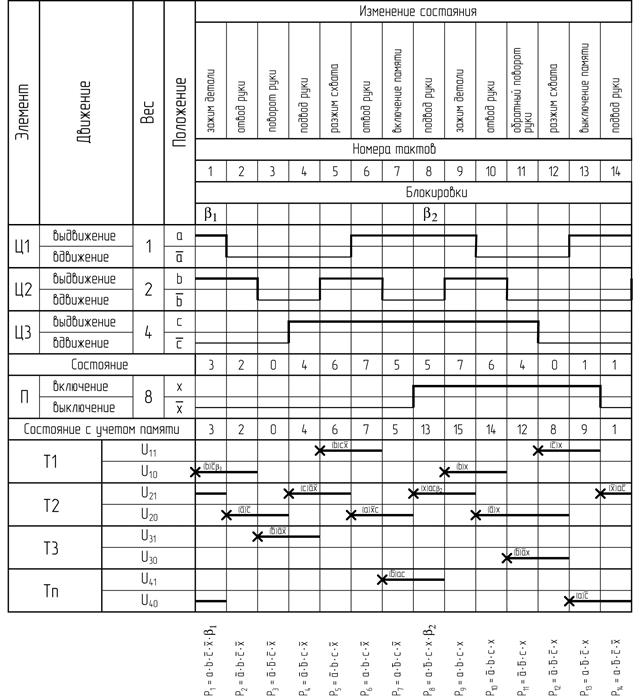
Рисунок 3
В строке крестиком отмечено начало пятого такта и обязательным является сигнал . Условие II при этом не выполняется. Добавляем с помощью операции И сигнал и проверяем условие II. Сигнал  имеется в 5, 6 и 9, 10 тактах. В соответствии с условием II в 9 и 10 тактах это недопустимо. Добавляем сигнал
имеется в 5, 6 и 9, 10 тактах. В соответствии с условием II в 9 и 10 тактах это недопустимо. Добавляем сигнал  , которым различаются эти такты. Сигнал
, которым различаются эти такты. Сигнал  имеется только в 5 и 6 тактах, следовательно, условие II выполняется. В этой же строке крестиком отмечено начало двенадцатого такта. Обязательным сигналом в этом случае является . Однако этот сигнал кроме 12, 13 и 14 тактов имеется в 1, 2 и 3 тактах, что по условию II недопустимо, поэтому добавляем сигнал . Интервал, в котором одновременно имеется
имеется только в 5 и 6 тактах, следовательно, условие II выполняется. В этой же строке крестиком отмечено начало двенадцатого такта. Обязательным сигналом в этом случае является . Однако этот сигнал кроме 12, 13 и 14 тактов имеется в 1, 2 и 3 тактах, что по условию II недопустимо, поэтому добавляем сигнал . Интервал, в котором одновременно имеется  , соответствует только тактам 12 и 13, т.е. условие II выполняется. Аналогично определяются логические функции включения и выключения для остальных триггеров.
, соответствует только тактам 12 и 13, т.е. условие II выполняется. Аналогично определяются логические функции включения и выключения для остальных триггеров.
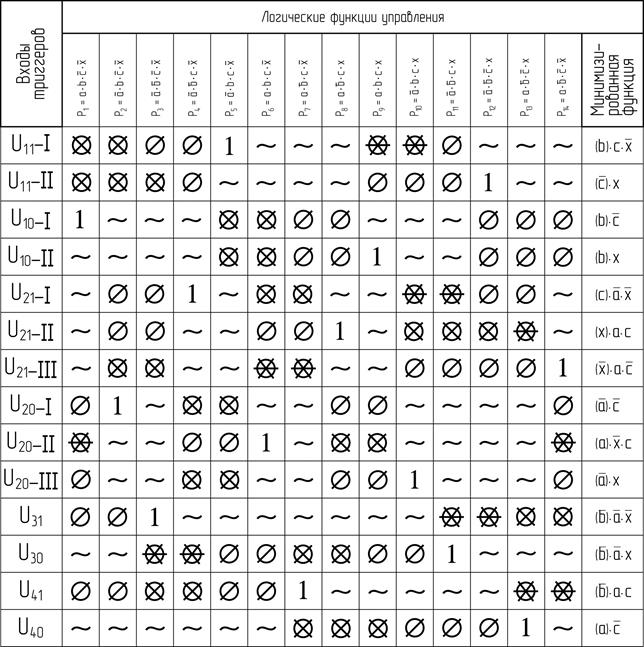
Таблица минимизации по методу логического подбора
При минимизации логических функций включения и выключения триггеров по методу логического подбора рекомендуется пользоваться таблицей, где «1» обозначается обязательное состояние, т.е. такт, в котором триггер включается или выключается. Тильдой (~) обозначаются безразличные состояния, т.е. такты, в которых сигнал на включение (выключение) триггера может подаваться или не подаваться. «0» обозначаются запрещенные состояния, т.е. такты, в которых на триггер не должен подаваться включающий сигнал на соответствующий вход.
Назначение упрощения – получить минимальную функцию включения и выключения триггеров.
Из условия работа триггеров следует, что минимизированная функция, соответствующая обязательному состоянию (обозначенному «1»), должна отличаться только от соответствующих запрещенных состояний (обозначенных «0»).
Первоначально для каждой строки таблицы определяется обязательный сигнал и выписывается в скобках (в правой части таблицы) его обозначение. Далее одной чертой вычеркиваются нули в тех тактах, в которых функции отличаются по выписанной переменной от функции в такте, обозначенном «1».
Например, для  - это такты
- это такты  ; они отличаются от
; они отличаются от  по переменной (сигналу) .
по переменной (сигналу) .
Если в строке, для которой производится минимизация, остаются такты, обозначенные «0» и не вычеркнутые, то к обязательному сигналу с помощью логической операции И добавляется следующий по порядку сигнал и производится зачеркивание нулей (двумя черточками) в тех тактах, в которых функция отличается по этой добавленной переменной от функции такта, обозначенного «1». (Для - это такты  и
и  ). Если же и после этого имеются такты, обозначенные не зачеркнутым «0», то к первым двум сигналам добавляется третий и производится зачеркивание (тремя черточками) нулей в оставшихся тактах, отличающихся от обязательного состояния (такт, обозначенный «1») по добавленной переменной. (Для - это такты
). Если же и после этого имеются такты, обозначенные не зачеркнутым «0», то к первым двум сигналам добавляется третий и производится зачеркивание (тремя черточками) нулей в оставшихся тактах, отличающихся от обязательного состояния (такт, обозначенный «1») по добавленной переменной. (Для - это такты  и
и  ).
).
Эта операция производится до тех пор, пока не будут зачеркнуты «0» во всех запрещающих тактах рассматриваемой строки. Полученную таким образом минимизированную функцию следует проверить на выполнение условий I и II правильности работы триггера.
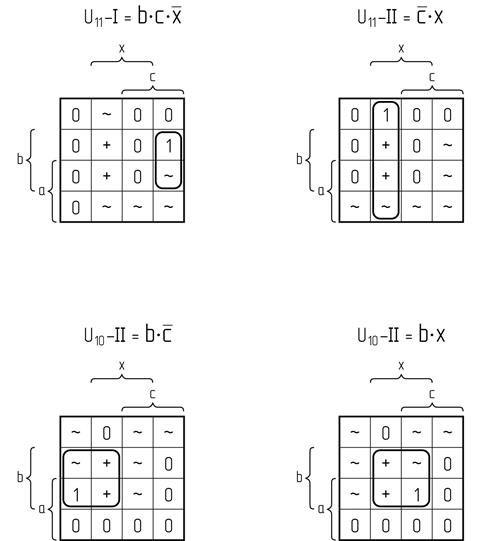
Рекомендуется минимизацию функций по методу логического подбора проверять упрощением этих же функций посредством карт Карно.
При минимизации по картам Карно необходимо:
- правильно определить обязательное состояние (как правило оно одно), безразличные состояния и неиспользованные (см. примечание **) состояния и обозначить их соответственно 1; ~; +;
- правильно группировать контуры из клеток карты Карно, учитывая обязательное наличие в контуре «1», т.е. обязательного состояния, при этом стремиться к максимально возможному (но допустимому правилом) числу клеток в контуре;
- учитывать, что клетки с безразличными и неиспользованными состояниями входят в выделенный контур на правах «условных» единиц и не могут самостоятельно группироваться в контур;
- учитывать, что если в минимизируемой строке таблицы включений имеется несколько обязательных состояний (несколько включений или выключений триггера), то минимизация проводится для каждого обязательного состояния отдельно, при этом остальные обязательные состояния считаются безразличными.
В рассматриваемом примере карты Карно для включающей строки и выключающей будут иметь вид, представленный на рисунке 4.
Рисунок 4
8. В функции включения и выключения триггеров вводятся разрешающие или подтверждающие блокировки. Для этого в составленные на предыдущем этапе логические выражения для тех тактов, в которых должны выполняться проверки блокировок, с помощью логической операции И дописывается соответствующий сигнал  . В рассматриваемом примере добавляется сигнал в первом такте и - в восьмом. При этом триггеры
. В рассматриваемом примере добавляется сигнал в первом такте и - в восьмом. При этом триггеры  и
и  в этих тактах переключаются лишь при выполнении условий блокировок.
в этих тактах переключаются лишь при выполнении условий блокировок.
9. Проводится проверочный анализ состояний по тактам реализуемой таблицы включений (рисунок 3), чтобы предотвратить ложное срабатывание триггеров, например, из-за состязания сигналов. В рассматриваемом примере состязание сигналов отсутствует.
10. Общие функции включения и выключения триггеров для синтезируемой СУ составляются путем объединения с помощью логической операции ИЛИ соответствующих функций для каждого их входа по тактам из реализуемой таблицы включений (рисунок 3).
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
11. По полученным логическим функциям составляется структурная схема синтезируемой цифровой САУ. Для рассматриваемого примера эта схема показана на рисунке 5.
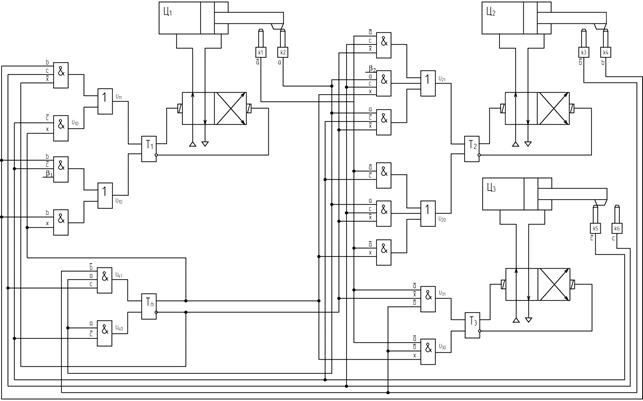
Рисунок 5
Примечания:
* В случае, когда в таблице включений имеется несколько попарно одинаковых числовых состояний (в различных тактах) и совпадают между собой по этому показателю не более двух тактов, то достаточно ввести только одну память, при этом допускается повторное включение триггера памяти.
** Неиспользованные – это такие состояния, которые не встречаются ни в одном такте таблицы включений, но могут быть составлены из набора переменных, используемых при синтезе данной цифровой САУ. Например, в рассматриваемом примере из четырех переменных можно получить 24 = 16 состояний, а использовано при синтезе цифровой САУ только 14 состояний. Неиспользованные состояния -  ;
;  . Эти состояния могут быть задействованы при минимизации логических функций любых тактов.
. Эти состояния могут быть задействованы при минимизации логических функций любых тактов.
Список литературы
1. Карпов Ю.Г. Теория автоматов: Учеб. для вузов. – СПб: Питер, 2003. – 208 с.
2. Рабинович А.Н. Системы управления автоматических машин. – Киев: Технiка, 1973. – 437с.
3. Теория автоматического управления: Учеб. для машиностроит. спец. вузов / В.Н. Брюханов, М.Г. Косов, С.П. Протопопов и др.; под ред. Ю.М. Соломенцева. – 3-е изд., стер. – М.: Высш. шк.; 2000. – 268с.
4. Усатенко С.Т., Каченюк Т.К., Терехова М.В. Выполнение электрических схем по ЕСКД: Справочник. – М.: Издат. Стандартов, 1992. – 316с.
Приложение 1
Варианты заданий для самостоятельной работы.