Математическое моделирование. Основные этапы математического моделирования
Математическое моделирование – предмет исследования объектов и явлений окружающего наш мир с помощью их приближенного описания на языке математики – математических моделей.
Процессы математического моделирования:
1. Построение модели
2. Постановка, исследование, решение математической задачи
3. Проверка модели на графике
Аппроксимация производных в крайних точках. Аппроксимация частных производных
Аппроксимацию производных конечными разностями в общем случае можно рассматривать как замену производной от функции y¢=f¢(x) производной от аппроксимирующей функции j¢(x), j(x)»f(x), где в качестве аппроксимирующей функции используется интерполяционный многочлен:  . Поэтому увеличивая степень интерполяционного многочлена n мы будем увеличивать порядок точности аппроксимации производной.
. Поэтому увеличивая степень интерполяционного многочлена n мы будем увеличивать порядок точности аппроксимации производной.
С помощью интерполяционного многочлена Лагранжа при равномерном распределении узлов были получены следующие формулы для аппроксимации производной с помощью центральных разностей второго и четвертого порядка точности:
 (2.8)
(2.8)
где, y(k)(x) - значение “к”-той производной в некоторой точке на отрезке [xi-2,xi+2].
В крайних точках таблицы или в крайних узлах нельзя использовать соотношения для центральных разностей (2.8). В этих точках используются односторонние формулы численного дифференцирования:

Метод оптимального пассивного поиска минимума функции
На отрезке [a,b] задается последовательность точек x0,x1,...,xn, таких, что xk=x0+kh, k=1,...,n; x0=a, xn=b. В этих точках вычисляется значение функции f(xk). За точку минимума  принимается та точка xk, для которой выполняется соотношение:
принимается та точка xk, для которой выполняется соотношение:  .
.
Следовательно:  Отсюда
Отсюда 
Экзаменационный билет № 2
Погрешности арифметических операций. Правила оценки погрешности.
Погрешности функций
Погрешности арифметических операций:
а) при сложении и вычитании двух величин их абсолютные предельные погрешности складываются:
 .
.
б) при умножении и делении двух величин друг на друга их относительные предельные погрешности складываются:
 ,
,
 .
.
в) при возведении в степень приближенной величины ее относительная предельная погрешность умножается на показатель степени:
 .
.
Погрешности функций:
Пусть а- приближенное значение аргумента x функции y=f(x), а Dа- абсолютная погрешность аргумента, т.е.  При Dа<<1 для оценки абсолютной погрешности и относительной погрешностей функции используются следующие определение/
При Dа<<1 для оценки абсолютной погрешности и относительной погрешностей функции используются следующие определение/
Абсолютной погрешностью функции Dy называется произведение модуля производной функции на абсолютную погрешность аргумента, а относительной погрешностью функции dy называется отношение абсолютной погрешности функции к ее абсолютному значению, т.е.

Аналогичные соотношения можно записать для функции нескольких переменных, например, если U=f(x,y,z), то при:

имеет:

где  частные производные, по соответствующим аргументам.
частные производные, по соответствующим аргументам.
Полиномы Лежандра
Экзаменационный билет № 7
Требования, предъявляемые к вычислительным алгоритмам. Требования к программным реализациям вычислительной задачи
Требования к вычислительным алгоритмам
1. Экономичность(число элементарных операций)
2. Надлежащая точность(решение задачи с заданной или приемлемой точностью)
3. Экономия памяти(-)
4. Простота
Требования к программным реализациям алгоритмов
1. Надежность(без ошибок)
2. Работоспособность
3. Переносимость
4. Поддерживаемость
5. Простота
Версия
Аппроксимация состоит в том, что данную функцию f(x) приближенно заменяют (аппроксимируют) некоторой другой функцией, так, чтобы отклонение (x) от f(x) в заданной области [a,b] было минимально возможным, при этом функцию f(x) называют аппроксимируемой, а функцию (x) аппроксимирующей.
При приближении на непрерывном множестве точек отрезка [a,b] аппроксимацию называют непрерывной (или интегральной). Если приближение строится на заданном дискретном множестве точек {xi} i=0,1,... отрезка [a,b], то аппроксимацию называют точечной.
Если аппроксимирующая функция (x) строится для всего отрезка [a,b] на котором задана функция f(x), то говорят о глобальной аппроксимации, если же весь отрезок [a,b] разбит на частичные отрезки и на каждом используется своя аппроксимирующая функция, то говорят о локальной аппроксимации.
Равномерное и среднеквадратичное приближения. Если приближение строится таким образом, что величина отклонения (модуль разности двух функций f(x) и (x)) удовлетворяет условию
 (2.2)
(2.2)
то такое приближение (2.2) называют равномерным приближением.
Часто используется среднеквадратичное приближение функции f(x) функцией (x). Здесь стараются получить минимальную величину среднеквадратичного значения модуля разности аппроксимируемой и аппроксимирующей функций на всем отрезке [a,b]:
 (2.3)
(2.3)
Первая формула используется при непрерывной аппроксимации, а вторая при дискретной аппроксимации.
Версия


Метод Гаусса
Этот метод основан на приведении методом исключения системы к треугольному виду (прямой ход):
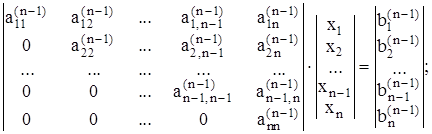 (2.4)
(2.4)
а затем решение этой системы начиная с xn, далее xn-1 и т.д. до x1 (обратный ход).
Если система сразу сводится к диагональному виду, то такой метод называется методом Жордана-Гаусса.
Для уменьшения погрешности округления при сведении матрицы А к треугольному виду выбирается максимальный элемент в столбце или в строке и с помощью перестановок он делает главным (схема частичного выбора). Если главный элемент выбирается во всей матрице, то схема носит название глобального выбора.
Алгоритм решения системы из n уравнений методом Гаусса с выбором главного элемента по столбцам выглядит следующим образом.
Прямой ход. На k шаге выбирается главный элемент в k столбце. Пусть это будет элемент в j -ой строке  , k£j£n. Верхний индекс в скобках указывает, что коэффициенты уравнения получены после (k-1) шага исключения.
, k£j£n. Верхний индекс в скобках указывает, что коэффициенты уравнения получены после (k-1) шага исключения.
Перестановкой j и k строк делает этот элемент диагональным.

Далее производим исключение xk из уравнений с номерами k+1,...,n с помощью соотношения:
 (2.5)
(2.5)
После n-1 шагов приходим к системе уравнений (2.4) с треугольной матрицей.
Обратный ход
Из последнего уравнения находим  . Далее определяем
. Далее определяем  , а затем
, а затем  и т.д. до x1 c помощью соотношения:
и т.д. до x1 c помощью соотношения:
 (2.6)
(2.6)
Метод прогонки
г) метод прогонки. Данный метод применяется для решения трех диагональных систем:

 (2.9)
(2.9)
Метод состоит из двух этапов прямой прогонки - и обратной прогонки.
Прямая прогонка: Величина xi выразим через xi+1 с помощью коэффициентов Ai, Bi
 . (2.10)
. (2.10)
Из первого уравнения находим значения A1 и B1:
 ,
,  . (2.11)
. (2.11)
Подставляя x1=A1·x2+B1 во второе уравнение (2.9) имеем:
a2(A1x2+B1)+b2x2+c2x3=d2,
или

Отсюда согласно (2.10) находим A2 и B2
 , (2.12)
, (2.12)
т.е. зная A1 и B1 по этой формуле мы можем вычислить A2 и B2. Аналогично подставляя значение xi-1=Ai-1xi+Bi-1 в i уравнение имеем:
ai(Ai-1xi+Bi-1)+bixi+cixi+1=di, i=1,2,...n.
Если в формуле (2.12) индекс 1 заменить на индекс i-1, а индекс 2 - на индекс i, то получим общую формулу для прямой прогонки:
 , i=2,...,n; (2.13)
, i=2,...,n; (2.13)
которая позволяет определить последующие значения Ai, Bi через предыдущие Ai-1, Bi-1.
После n шагов получим значения An и Bn. Так как cn=0, то An=0. Следовательно на основание (2.10) имеем: xn=Bn.
Обратная прогонка состоит в последовательных вычислениях по формуле (2.10) значений xn-1, xn-2 и т.д. до x1.
Если для трех диагональной системы выполнены условия çbiç³çaiç+çciç, ½bi½>½ai½, i=1,...,n, то эта система имеет единственное решение.
Интерполяция сплайнами
Сплайн (от англ. слова “splane” - гибкий) это функция, которая на всем отрезке интерполяции непрерывна вместе со своими k первыми производными (k£m-1) и на каждом частичном отрезке представляет алгебраический многочлен (полином) степени m.
См. стр 55 (Турчак)
Точность интерполяции
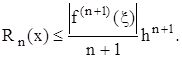
Погрешность интерполяции Rn(x) зависит от числа узлов n и равна:
 (2.11)
(2.11)
В узлах интерполяции погрешность равна нулю. Ее величина зависит от вида аппроксимирующей функции и вычисляется по следующей формуле:
 (2.12)
(2.12)
где x неизвестная точка на отрезке [x0,xn].
Для равномерного распределения узлов, когда xi-xi-1=h, для всех i=1,2,...,n (равномерная сетка с шагом h) можем записать:
Требования к вычислительным программам
Требования к программным реализациям алгоритмов
1. Надежность(без ошибок)
2. Работоспособность
3. Переносимость
4. Поддерживаемость
5. Простота
Метод ячеек
Пусть требуется вычислить двукратный интеграл в области G(a£x£b, c£y£d):

С помощью узлов xi (i=0,1,..n) и yj (j=0,1,...,m) и прямых, проходящих через эти узлы: x=xi и y=yj, разобьем область G на (n×m) прямоугольных ячеек, имеющих площадь:

Выбираем в этой ячейке центральную точку:

Будем считать, что интеграл для каждой ячейке приближенно равен:
 (2.12)
(2.12)
Суммируя по всем ячейкам имеем:
 (2.13)
(2.13)
при этом погрешность, когда все ячейки имеют одинаковую площадь  будет равна
будет равна
 ; (2.14)
; (2.14)
где S - площадь области G, m и n - количество узлов по координатам x,y;  ,
,  - максимальное значение вторых частных производных по соответствующим координатам.
- максимальное значение вторых частных производных по соответствующим координатам.
Версия
Метод простой итерации. Уравнение f(x)=0 преобразуют к виду удобному для организации итерации: x=j(x), при этом функция j(x) называется итерационной функцией. На отрезке локализации [a,b] выбирается начальное приближение x=x0 и вычисляется x1=j(x0). Продолжая этот процесс имеем:
 .
.
Если существует  , то получаем равенство:
, то получаем равенство:  где
где  - корень. Метод сходится при
- корень. Метод сходится при  , а при
, а при  - расходится.
- расходится.
Критерий окончания:

Метод касательных (метод Ньютона). Выбирается точка x0Î[a,b] и в ней проводится касательная к графику функции y=f(x) и за новое приближение x1 принимается точка, в которой касательная пересекает ось OX и т.д. В итоге получаем итерационную формулу Ньютона:
 (2.6)
(2.6)
Необходимым и достаточным условием сходимости метода Ньютона на отрезке локализации xÎ[a,b] являются:
f¢(x)¹0, - (необходимое условие); (2.7)
f¢¢(x)¹0 - (достаточное условие);
т.е. знакопостоянство первой и второй производной на отрезке локализации.
Версия
Пусть имеется следующая система нелинейных уравнений:
 (6.5)
(6.5)
Как уже отмечалось выше, для одной переменной метод Ньютона использует замену искомого уравнения уравнением прямой или, как еще говорят, производит линеаризацию исходного уравнения. Пусть имеется k - ое приближение:  . Разложим левые части системы уравнений в ряд Тейлора и учтем только линейные члены:
. Разложим левые части системы уравнений в ряд Тейлора и учтем только линейные члены:
 (6.6)
(6.6)
где  , i=1,2,...,n; а частные производные вычисляются в точке k-го приближения: x1=x1(k), x2=x2(k),...,xn=xn(k).
, i=1,2,...,n; а частные производные вычисляются в точке k-го приближения: x1=x1(k), x2=x2(k),...,xn=xn(k).
Заменим в исходной системе нелинейные функции fi(x1,x2,...,xn) на правые части этих приближенных равенств, которые являются линейными функциями относительно переменных xi, i=1,2,...,n. В итоге получим следующую систему линейных уравнений относительно переменных xi, i=1,2,...,n:
 (6.7)
(6.7)
Из этой системы можно определить значения xi, i=1,2,...,n и вычислить значения k+1-приближения:  . Данная система уравнений представляют собой метод Ньютона для системы нелинейных уравнений.
. Данная система уравнений представляют собой метод Ньютона для системы нелинейных уравнений.
Определитель этой системы называется якобианом.
 . (6.8)
. (6.8)
Для существования решения якобиан должен быть отличен от нуля для каждого шага итерации.
Критерий окончания. Итерационный процесс продолжается до тех пор, пока не выполнятся условия:  , для всех i=1,2,...,n.
, для всех i=1,2,...,n.
Погрешность интерполяции
См. «Точность интерполяции»
Погрешность интерполяции Rn(x) зависит от числа узлов n и равна:
 (2.11)
(2.11)
В узлах интерполяции погрешность равна нулю. Ее величина зависит от вида аппроксимирующей функции и вычисляется по следующей формуле:
 (2.12)
(2.12)
где x неизвестная точка на отрезке [x0,xn].
Для равномерного распределения узлов, когда xi-xi-1=h, для всех i=1,2,...,n (равномерная сетка с шагом h) можем записать:

Экзаменационный билет № 28
Математическое моделирование. Основные этапы математического моделирования
Математическое моделирование – предмет исследования объектов и явлений окружающего наш мир с помощью их приближенного описания на языке математики – математических моделей.
Процессы математического моделирования:
1. Построение модели
2. Постановка, исследование, решение математической задачи
3. Проверка модели на графике





