Потенциальная энергия
Часть пространства, в которой на помещенную туда материальную точку действует сила, зависящая от места положения точки, называется силовым полем.
Причем, эта сила определяется с помощью силовой функции u = u(x, y, z). Если она не зависит от времени, то такое поле называется стационарным. Если во всех точках она одинакова, то поле – однородное.
Если же проекции силы на декартовы оси есть частные производные от силовой функции по соответствующим координатам
 ,
,  ,
,  ,
,
то такое поле называется потенциальным.
Работа силы потенциального поля при перемещении точки из положения М 1 в положение М 2.

где u 2 и u 1 – значения силовой функции в точках М 2 и М 1.
Следовательно, работа силы потенциального поля не зависит от траектории движения точки, а определяется лишь значениями силовой функции в начальном и конечном положениях точки.
Естественно, если точка вернется в начальное положение, работа силы  будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М 3, если там значение силовой функции будет такое же, как и в начальном положении.
будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М 3, если там значение силовой функции будет такое же, как и в начальном положении.
Точки с одинаковыми значениями силовой функции будут образовывать целую поверхность. И что силовое поле – это слоеное пространство, состоящее из таких поверхностей. Эти поверхности называются поверхностями уровня или эквипотенциальными поверхностями. Уравнения их: u (x, y, z) = C (C – постоянная, равная значению u в точках этой поверхности). А силовую функцию называют, соответственно, потенциалом поля.
Выберем среди этих поверхностей какую-нибудь одну и назовем ее нулевой поверхностью (положим у нее u = u 0).
Работа, которую совершит сила при переходе точки из определенного места М на нулевую поверхность, называют потенциальной энергией точки в этом определенном месте М:
П = А = u0 – u.
Проекции силы на декартовы оси:
 ;
;  ;
; 
1) Поле силы тяжести.
Вблизи поверхности Земли сила тяжести во всех точках одинакова
П = А = Ph.
2) Поле упругой силы.
При деформации упругого тела, например пружины, появляется сила. То есть около этого тела возникает силовое поле, силы которого пропорциональны деформации тела и направлены в сторону недеформированного состояния. У пружины – в точку М0, где находится конец недеформированной пружины.
 Если перемещать конец пружины так, чтобы длина ее не изменялась, то работа упругой силы будет равна нулю. Значит эквипотенциальными поверхностями являются сферические поверхности с центром в точке О.
Если перемещать конец пружины так, чтобы длина ее не изменялась, то работа упругой силы будет равна нулю. Значит эквипотенциальными поверхностями являются сферические поверхности с центром в точке О.
Назначим нулевой поверхностью сферу, проходящую через точку М0, через конец недеформированной пружины. Тогда потенциальная энергия пружины в положении М: 
При таком выборе нулевой поверхности потенциальная энергия всегда будет положительной (П >0), и в растянутом, и в сжатом состоянии.
Кинетическая энергия
Кинетической энергией материальной точки массой m, движущейся с абсолютной скоростью v называют половину произведения массы точки на квадрат ее скорости.

Кинетической энергией системы называют сумму кинетических энергий всех точек системы.

Теорема Кенига. Кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы при ее движении относительно центра масс.

Закон сохранения энергии
При движении системы в потенциальном поле механическая энергия ее (сумма потенциальной и кинетической) все время остается неизменной, постоянной:
П + Т = const.
Это и есть закон сохранения механической энергии.
Такую материальную систему, при движении которой действует этот закон, называют консервативной системой (энергия ее как бы законсервирована, не изменяется).
Силы инерции твердого тела
Главный вектор сил инерции точек тела, при любом его движении,
 ин =
ин =  .
.
То есть величина главного вектора равна произведению массы тела на ускорение центра масс его и направлен в сторону противоположную ускорению центра масс.
Рассмотрим несколько частных случаев.
1. Твердое тело движется поступательно.
При таком движении главный момент сил инерции можно не определять, а находить сразу равнодействующую этих сил.
Она равна главному вектору  ин =
ин =  , и приложена к точке, радиус-вектор которой
, и приложена к точке, радиус-вектор которой  , равен радиусу-вектору центра масс.
, равен радиусу-вектору центра масс.
Следовательно, равнодействующая сил инерции точек тела при поступательном движении приложена к центру масс тела, как к центру параллельных сил.
2. Твердое тело вращается вокруг неподвижной оси.
Главный момент сил инерции точек тела относительно неподвижной оси вращения равен произведению момента инерции тела относительно этой оси на модуль углового ускорения
 .
.
Направляется он в сторону, противоположную угловому ускорению.
Главный момент сил инерции относительно оси x
 ,
,
где Jxz, Jyz – центробежные моменты инерции тела относительно соответствующих осей в точке О
Главный момент сил инерции точек тела относительно оси у
 .
.
Опять, если тело имеет плоскость симметрии, перпендикулярную оси вращения  .
.
Определив главные моменты сил инерции точек тела относительно взаимно перпендикулярных осей х, у, z, можно найти главный момент относительно точки О, начала координат,
 ,
,
1. Тело совершает плоскопараллельное движение.
Главный момент сил инерции точек тела при плоскопараллельном движении относительно центральной оси С, перпендикулярной плоскости движения, равен произведению момента инерции относительно этой оси на модуль углового ускорения
 .
.
Направляется этот момент в сторону, противоположную направлению углового ускорения  .
.
Принцип Даламбера удобно использовать при решении задач, в которых требуется определить неизвестные силы и, иногда, ускорение.
 Пример 1. Шар весом Р скатывается без скольжения по наклонной плоскости. Определим реакции плоскости и ускорение центра масс С.
Пример 1. Шар весом Р скатывается без скольжения по наклонной плоскости. Определим реакции плоскости и ускорение центра масс С.
Показываем внешние силы, действующие на шар: вес  , реакции
, реакции  и
и  (трение качения учитывать не будем). Добавляем силы инерции: главный вектор
(трение качения учитывать не будем). Добавляем силы инерции: главный вектор  , приложенный к центру масс, и главный момент сил инерции относительно центральной оси. Величина их
, приложенный к центру масс, и главный момент сил инерции относительно центральной оси. Величина их
 ;
;
 .
.
Составляем уравнения равновесия:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Из первого уравнения находим ускорение центра масс.
Так как  , то
, то  .
.
Из второго уравнения – силу трения  ;
;
из третьего – нормальную реакцию N = P cos α ..
Моменты инерции некоторых тел, которые чаще всего встречаются при исследовании движения материальных систем:


Количество движения
Количеством движения материальной точки  называется вектор, равный произведению массы точки
называется вектор, равный произведению массы точки  на ее скорость
на ее скорость  .
. 
Проекции количества движения точки на прямоугольные декартовы оси координат равны:
 ,
,  ,
, 
Количеством движения системы материальных точек  называется векторная сумма количеств движений отдельных точек системы.
называется векторная сумма количеств движений отдельных точек системы.

Единицей измерения количества движения в СИ является – 
Количество движения системы можно выразить через массу системы и скорость центра масс. 
В проекциях на оси координат:
 ,
, 

Энергия материальной системы
Работа силы 
 Работа - одна из основных характеристик силы, оценивающих действие силы на тело при некотором его перемещении. Если точка приложения силы движется по прямолинейной траектории, то работой постоянной по величине и направлению силы на перемещении s называется выражение
Работа - одна из основных характеристик силы, оценивающих действие силы на тело при некотором его перемещении. Если точка приложения силы движется по прямолинейной траектории, то работой постоянной по величине и направлению силы на перемещении s называется выражение

Работу будем считать положительной, если направление силы совпадает с направлением перемещения точки приложения силы из начального положения в конечное.
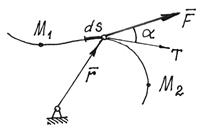 Поскольку от выбора угла α или β зависит знак работы, то удобнее брать всегда острый угол α между вектором силы и траекторией. Тогда, если вектор силы перпендикулярен траектории, работа силы равна нулю.
Поскольку от выбора угла α или β зависит знак работы, то удобнее брать всегда острый угол α между вектором силы и траекторией. Тогда, если вектор силы перпендикулярен траектории, работа силы равна нулю.
Если вектор силы изменяется и точка приложения ее движется по кривой линии, то формула неприменима. В этом случае надо сначала вычислить элементарную работу силы на перемещении ds
Элементарная работа силы - скалярная величина, равная произведению элементарного перемещения на проекцию силы на это перемещение.
 или
или  .,
.,

Единицей измерения работы в СИ является – 
При  при
при 
Частные случаи: 


Элементарная работа силы равна скалярному произведению силы на элементарное перемещение или на дифференциал радиуса вектора точки приложения силы.

Если сила  задана своими проекциями (
задана своими проекциями ( ) на оси координат и элементарное перемещение задано своими проекциями (
) на оси координат и элементарное перемещение задано своими проекциями ( ) на оси координат, то элементарная работа силы равна:
) на оси координат, то элементарная работа силы равна:
 (аналитическое выражение элементарной работы).
(аналитическое выражение элементарной работы).
Работа силы на любом конечном перемещении  равна взятому вдоль этого перемещения интегралу от элементарной работы.
равна взятому вдоль этого перемещения интегралу от элементарной работы.

Мощностью силы называется величина, определяющая работу, совершаемую силой в единицу времени. В общем случае мощность равна первой производной по времени от работы.
 ,
, 
Мощность равна скалярному произведению силы на скорость.
Единицей измерения мощности в СИ является – 
В технике за единицу силы принимается  .
.
Работа веса тела (силы тяжести).
 Пусть тело перемещается вблизи поверхности Земли из одного положения в другое так, что центр тяжести его движется по кривой линии.
Пусть тело перемещается вблизи поверхности Земли из одного положения в другое так, что центр тяжести его движется по кривой линии.
Элементарная работа силы  , постоянной и направленной вертикаль-но вниз,
, постоянной и направленной вертикаль-но вниз,
dA = –Pdz. проинтегрировав выражение, получим

A = Ph
Следовательно работа веса тела (постоянной силы тяжести) не зависит от траектории движения центра тяжести. Определяется лишь высотой, на которую опустится или поднимется центр тяжести. Работа положительна, если начальная точка выше конечной, и отрицательна, если начальная точка ниже конечной.
Работа силы упругости.
 Рассмотрим материальную точку закрепленную на упругом элементе жесткости с, которая совершает колебания вдоль оси х. Сила упругости (или восстанавливающая сила)
Рассмотрим материальную точку закрепленную на упругом элементе жесткости с, которая совершает колебания вдоль оси х. Сила упругости (или восстанавливающая сила)  . Пусть точка М, на которую действует только сила упругости, перемещается из положения
. Пусть точка М, на которую действует только сила упругости, перемещается из положения  в положение
в положение  . (
. ( ,
,  ).
).
dA = –F∙dx = –cx∙dx
и тогда при перемещении конца пружины от положения х 0 до х 1 работа
 .
.

где D – изменение величины деформации. Знак (–) ставится при увеличении деформации, (+) – при уменьшении.
Работа силы, приложенной к телу, вращающемуся вокруг неподвижной оси.
 точка приложения силы движется по окружности радиуса r. Элементарная работа
точка приложения силы движется по окружности радиуса r. Элементарная работа  , где
, где  .
.
Поэтому  .
.
Но  .
.
Значит,

В частности, если момент силы относительно оси  , работа силы при повороте тела на угол φ равна
, работа силы при повороте тела на угол φ равна
 .
.
Знак работы определяется знаками момента силы и угла поворота. Если они одинаковы, работа положительная.
 Из формулы следует и правило определения работы пары сил. Если пара с моментом m расположена в плоскости перпендикулярной оси вращения тела, то элементарная работа пары сил равна
Из формулы следует и правило определения работы пары сил. Если пара с моментом m расположена в плоскости перпендикулярной оси вращения тела, то элементарная работа пары сил равна
 .
.
Полная работа пары сил равна 
 - угол поворота тела,
- угол поворота тела,  - момент пары сил.
- момент пары сил.
Мощность пары сил равна
Потенциальная энергия
Часть пространства, в которой на помещенную туда материальную точку действует сила, зависящая от места положения точки, называется силовым полем.
Причем, эта сила определяется с помощью силовой функции u = u(x, y, z). Если она не зависит от времени, то такое поле называется стационарным. Если во всех точках она одинакова, то поле – однородное.
Если же проекции силы на декартовы оси есть частные производные от силовой функции по соответствующим координатам
, , ,
то такое поле называется потенциальным.
Работа силы потенциального поля при перемещении точки из положения М 1 в положение М 2.
где u 2 и u 1 – значения силовой функции в точках М 2 и М 1.
Следовательно, работа силы потенциального поля не зависит от траектории движения точки, а определяется лишь значениями силовой функции в начальном и конечном положениях точки.
Естественно, если точка вернется в начальное положение, работа силы будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М 3, если там значение силовой функции будет такое же, как и в начальном положении.
Точки с одинаковыми значениями силовой функции будут образовывать целую поверхность. И что силовое поле – это слоеное пространство, состоящее из таких поверхностей. Эти поверхности называются поверхностями уровня или эквипотенциальными поверхностями. Уравнения их: u (x, y, z) = C (C – постоянная, равная значению u в точках этой поверхности). А силовую функцию называют, соответственно, потенциалом поля.
Выберем среди этих поверхностей какую-нибудь одну и назовем ее нулевой поверхностью (положим у нее u = u 0).
Работа, которую совершит сила при переходе точки из определенного места М на нулевую поверхность, называют потенциальной энергией точки в этом определенном месте М:
П = А = u0 – u.
Проекции силы на декартовы оси:
; ;
1) Поле силы тяжести.
Вблизи поверхности Земли сила тяжести во всех точках одинакова
П = А = Ph.
2) Поле упругой силы.
При деформации упругого тела, например пружины, появляется сила. То есть около этого тела возникает силовое поле, силы которого пропорциональны деформации тела и направлены в сторону недеформированного состояния. У пружины – в точку М0, где находится конец недеформированной пружины.
Если перемещать конец пружины так, чтобы длина ее не изменялась, то работа упругой силы будет равна нулю. Значит эквипотенциальными поверхностями являются сферические поверхности с центром в точке О.
Назначим нулевой поверхностью сферу, проходящую через точку М0, через конец недеформированной пружины. Тогда потенциальная энергия пружины в положении М:
При таком выборе нулевой поверхности потенциальная энергия всегда будет положительной (П >0), и в растянутом, и в сжатом состоянии.
Кинетическая энергия
Кинетической энергией материальной точки массой m, движущейся с абсолютной скоростью v называют половину произведения массы точки на квадрат ее скорости.
Кинетической энергией системы называют сумму кинетических энергий всех точек системы.
Теорема Кенига. Кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы при ее движении относительно центра масс.





