Математические модели асинхронного двигателя
Наиболее точным математическим описанием асинхронного двигателя являются уравнения Парка - Горева, записанные аналогично синхронной машине с учетом следующих отличий: отсутствие обмотки возбуждения, магнитной и электрической симметрии ротора. Это позволяет несколько упростить уравнения и выбрать наиболее удобную систему координат. Поскольку ротор и статор асинхронного двигателя симметричны, то его дифференциальные уравнения переходных процессов, записанные в системе координат как жестко связанных с ротором, так и вращающихся с постоянной скоростью, не будут содержать переменных коэффициентов.
При расчетах электромеханических переходных процессов в асинхронных двигателях часто пренебрегают электромагнитными переходными процессами в его обмотках, т. е. полагают в уравнениях производными, равными нулю  . В этом случае уравнения имеют вид
. В этом случае уравнения имеют вид



где  ,
,  ,
,  ,
,  - потокосцепление обмоток по осям d и q статора и ротора соответственно;
- потокосцепление обмоток по осям d и q статора и ротора соответственно;
 ,
,  ,
,  ,
,  - токи в обмотках статора и ротора;
- токи в обмотках статора и ротора;  - активные сопротивления статора и ротора.
- активные сопротивления статора и ротора.

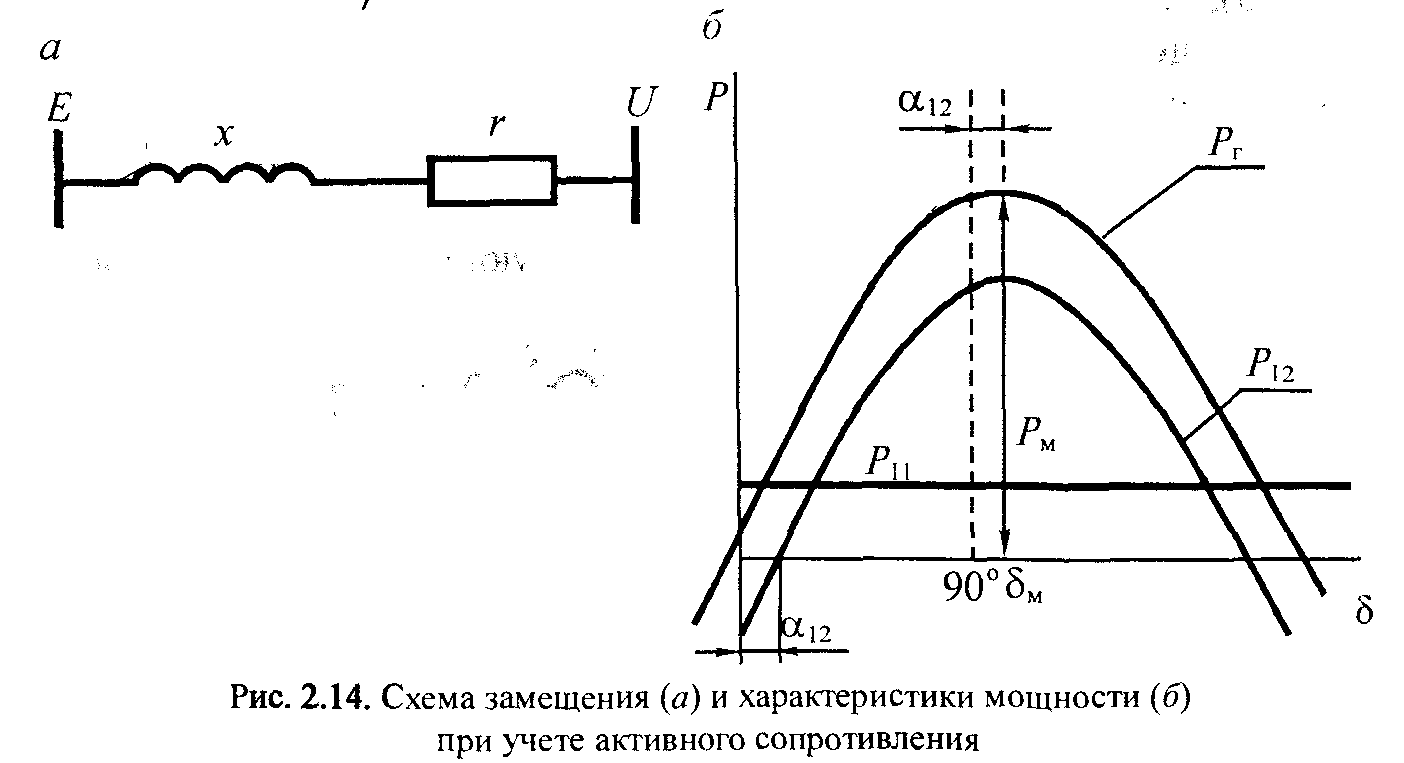
В переходных и установившихся режимах асинхронный двигатель может быть представлен схемой замещения, показанной на рис. 1.23, а. Это известная и широко используемая в расчетах Т-образная схема замещения. При выполнении приближенных расчетов сопротивление х которое много больше + jxv выносят на зажимы обмотки статора. Активным сопротивлением r, в расчетах устойчивости обычно пренебрегают, сопротивления рассеяния объединяют в сопротивление х, = х + х2. Таким образом получаем Г-образную схему замещения, приведенную на рис. 1.23, б.
Cледует отметить, что полученные выше уравнения определяют параметры при условии, что активные и реактивные сопротивления асинхронного двигателя не зависят от скольжения.
Влияние параметров схемы на характеристики мощности.



Характеристики мощности генераторов с АРВ.


Действительный предел мощности.

Векторные диаграммы и характеристики мощности синхронных машин.


Упрощенное представление генераторов в расчетах статической устойчивости.

14. Векторные диаграммы явнополюсного синхронного генератора.
Напряжение на выходе синхронного генератора с явновыраженными полюсами
 , (15.6)
, (15.6)
отражение на рис. 15.2, а. Через падение напряжений напряжения на выходе этого генератора
 . (15.7)
. (15.7)
Векторная диаграмма, соответствующая (15.7), приведена на рис. 15.2, б. Нагрузка на генератор активно-индуктивная.
Рис. 15.2. Векторные диаграммы синхронного генератора при работе на активно-индуктивной нагрузке, выраженные через: а – векторы эдс; б – векторы падений напряжений
Выражения (15.6) и (15.7) представляют собой уравнения напряжений явнополюсного синхронного генератора.
Упрощенные векторные диаграммы синхронного генератора.
Лавина частоты
Статическая частотная характеристика энергосистемы с учетом АРС генераторов может быть представленна в виде:





41 лавина частоты (продолжение)
 .
.
При больших дефецитах мощности  вызывающих глу-
вызывающих глу-



ЭЛЕКТРИЧЕСКИХ МАШИН
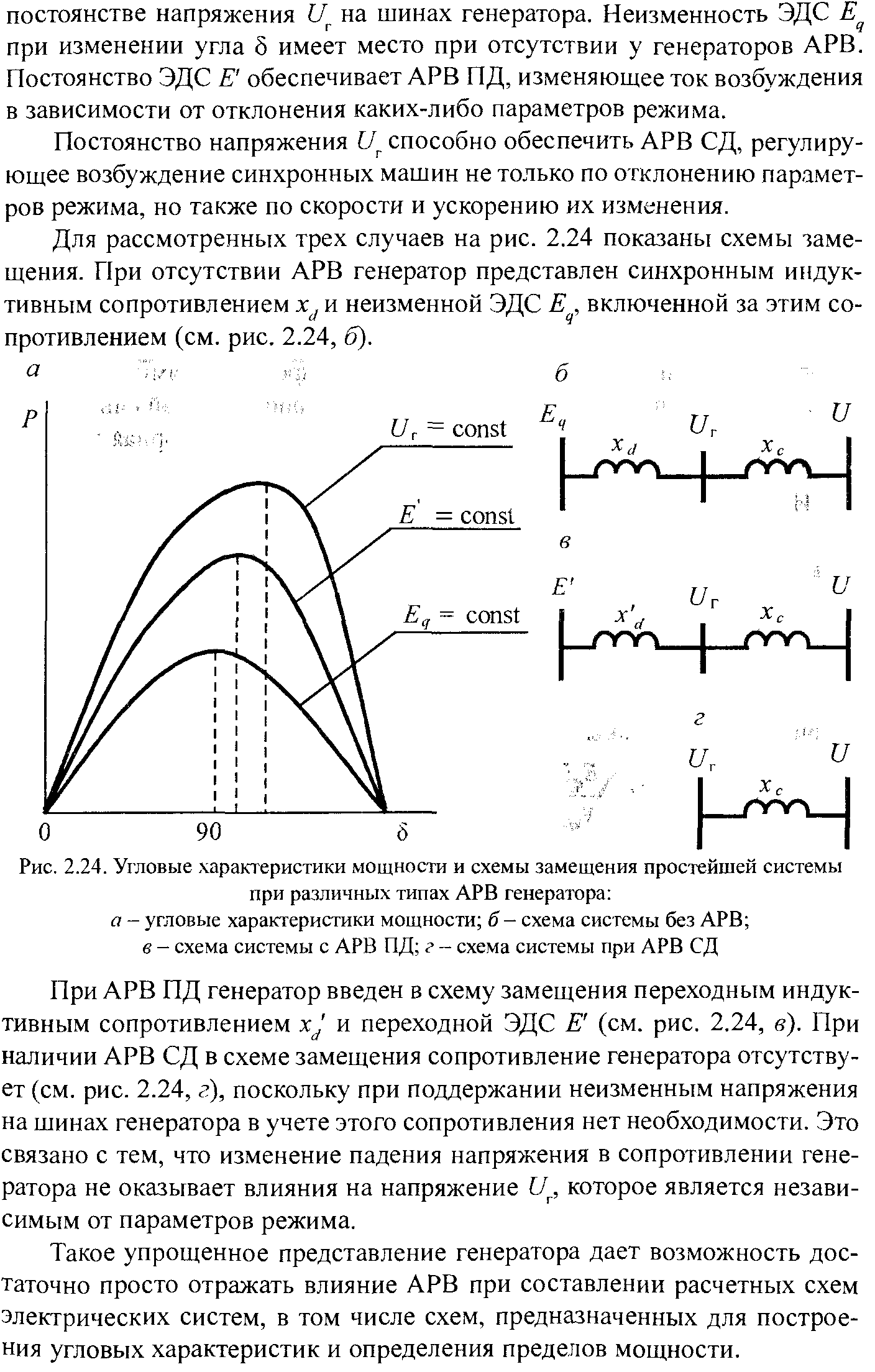
Важнейшими элементами электроэнергетической системы с точки зрения устойчивости являются синхронные генераторы и двигатели. При отсутствии АРВ или использовании регуляторов с зоной нечувствительности на статическую устойчивость системы существенное влияние оказывает величина синхронного сопротивления xd на динамическую - переходное сопротивление х'd синхронных машин.
Это прежде всего относится к синхронным двигателям, имеющим именно такие виды регулирования возбуждения.
Генераторы современных электрических систем оснащены, как правило, АРВ, не имеющими зоны нечувствительности, поэтому на статическую и динамическую устойчивость оказывает влияние лишь переходное индуктивное сопротивление х'd гак как реакция якоря не успевает заметно проявиться в начале переходного процесса.
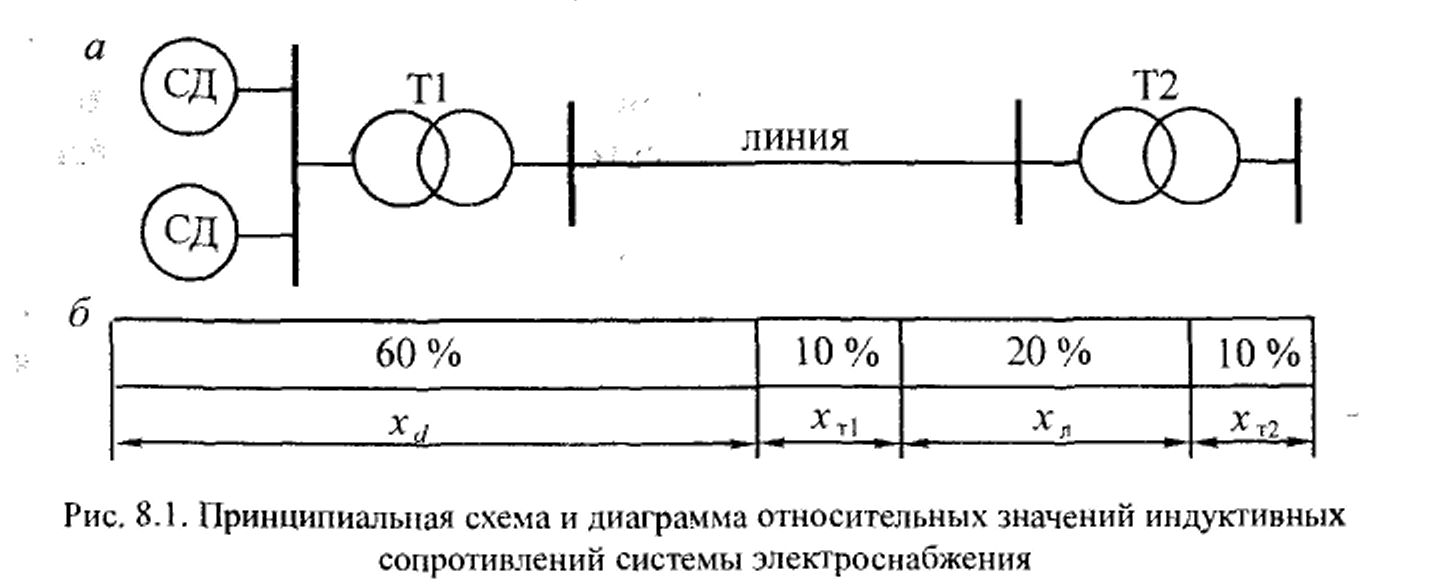
Синхронное сопротивление электрических машин имеет преобладающее значение в суммарном сопротивлении системы электроснабжения. На рис. 8.1 показано соотношение между индуктивными сопротивлениями отдельных элементов типовой системы электроснабжения с синхронными двигателями. Поэтому при отсутствии АРВ на синхронных двигателях значение их индуктивных сопротивлений оказывает существенное влияние на статическую устойчивость системы.
У турбогенераторов синхронное сопротивление в относительных единицах, если за базисные величины принять номинальные значения напряжения и мощности, обычно составляют 1.0-1,4, у гидрогенераторов оно увеличивается и достигает 1.8-2,0, а у синхронных двигателей - 1,5-3 и больше.
Для рассматриваемой системы электроснабжения (см. рис. 8.1) влияние уменьшения сопротивления электрических машин на статическую устойчивость очевидно из выражения предельной передаваемой мощности

На рис. 8.2 показан характер изменения Рпр при изменении xd и отсутствии автоматических регуляторов на машинах. Как видно, чем меньше сопротивление синхронных машин, тем лучше условия статической устойчивости системы электроснабжения. Синхронное сопротивление электрической машины, определяемое двумя составляющими xd=хs + xad можно уменьшить в основном за счет реактивного сопротивления реакции якоря xad. Практически это можно сделать путем увеличения воздушного зазора в машине. Однако при увеличении воздушного зазора приходится увеличивать ток и количество витков обмотки возбуждения. Это приводит к увеличению размеров и удорожанию синхронной машины.
При наличии АРВ ПД предельная передаваемая мощность Рпр по условиям статической устойчивости, как известно, будет определяться переходной ЭДС E'd и переходным сопротивлением х'd Однако при этом характер зависимости Рпр = f(х'd) будет аналогичен рис. 8.2, но несколько более пологий, так как значение х'd в общем сопротивлении системы значительно меньше, чем хd
Переходное индуктивное сопротивление синхронных машин невелико, и для генераторов оно не превышает обычно 0,2-0,3, для двигателей 0,2-0,5. Поскольку переходное индуктивное сопротивление является фактически сопротивлением рассеяния, то его уменьшение связано с большими трудностями. Так, например, если хd в два раза увеличивает стоимость машины на 30 %, то такое же уменьшение переходного индуктивного сопротивления приводит к удорожанию более чем на 50 %.
Влияние уменьшения переходного сопротивления на динамическую устойчивость сводится к повышению амплитуды мощности в переходном режиме. Однако, как уже отмечалось, значение х'd в общем сопротивлении системы (рис. 8.1, б) значительно меньше, чем хd. Поэтому, как видно из рис. 8.3, уменьшение переходного сопротивления на 30 % не оказывает существенного влияния на динамическую устойчивость. Причем эффективность снижения ^зависит от скорости отключения КЗ - чем быстрее отключается КЗ, тем меньший эффект дает уменьшение х'd (рис. 8.3).
Индуктивное сопротивление рассеяния асинхронного двигателя является одним из важнейших параметров, определяющих степень его устойчивости. Напомним, что его значение оказывает влияние на величину максимальной мощности и критического скольжения асинхронного двигателя
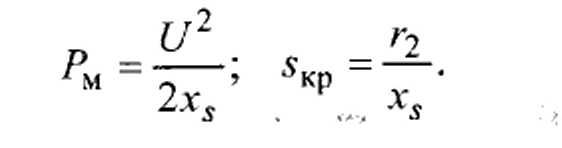



Для повышения устойчивости асинхронных двигателей желательно иметь как можно большие значения Рм и sкр. Этого можно добиться, уменьшая хs. Однако снижение сопротивления рассеяния асинхронного двигателя связано с техническими трудностями как и при снижении х'd синхронных машин, что приводит к удорожанию асинхронного двигателя.
ЭЛЕКТРИЧЕСКИХ МАШИН
Как известно, постоянная инерции TJ не оказывает влияния на предельное значение угла отключения КЗ для синхронной машины и скольжения для асинхронного двигателя. Однако от величины постоянной механической инерции зависит скорость изменения угла и скольжения электрических машин. Чем больше постоянная инерции машины, тем медленнее изменяется ее угол и скольжение в переходном процессе, а следовательно, будет больше и предельное время отключения КЗ.
Влияние постоянной механической инерции на время отключения можно оценить, если рассмотреть режимы электрических машин при трехфазных коротких замыканиях на их шинах. В данном случае, как известно, предельное время отключения короткого замыкания для синхронной машины определяется уравнением (3.14, а), а для асинхронного двигателя - уравнением (4.27).
Как следует из данных уравнений, увеличение постоянной инерции увеличивает tпр, в течение которого достигается предельный угол δпр или предельное скольжение s пр. При этом для повышения в п раз предельного времени отключения в рассматриваемом режиме постоянную инерции синхронной машины необходимо увеличить в п2 раз, а асинхронного двигателя -в п раз.
Как видно из рис. 8.4, 8.5, увеличение постоянной инерции неявнополюсной синхронной машины вдвое по сравнению с ее обычным значением повышает стоимость машины на 20 % и увеличивает предельное время отключения на 45 %.
При изменении постоянной механической инерции машины обычно изменяются и другие параметры электрических машин. Поэтому практически для повышения постоянной инерции электрических агрегатов


Рис. 8.5. Зависимость предельного времени отключения трехфазного короткого замыкания от величины постоянной инерции синхронной машины
необходимо рекомендовать установку на вал машины или приводного механизма специальных устройств - маховиков.
Краткая история возникновения и развития проблемы устойчивости электроэнергетических систем
Проблемы устойчивости возникли впервые в механике при изучении равновесных положений системы. По мере развития науки и техники в середине XIX столетия появились задачи обеспечения устойчивости не только равновесия, но и движения. Так, например, центробежные регуляторы, установленные на паровых машинах небольшой мощности, устойчиво сохраняли заданные обороты двигателя. С увеличением мощности машин регуляторы, построенные по тем же схемам, не только не обеспечивали надежного регулирования, но даже разгоняли двигатели, создавая неустойчивый режим работы.
В конце XIX века начался процесс исторического становления комплексной энергетики. Появившиеся в эти годы электрические станции становятся фабриками нового товара - электроэнергии, который находит широкий спрос в быту и промышленности. На первых электростанциях вначале все генераторы работали изолированно друг от друга, т. е. каждый генератор питал через отдельную линию свою группу потребителей. Однако необходимость отключения потребителей электроэнергии при ремонте питающего их генератора, трудности с выделением потребителей на определенную линию привели к потребности объединения генераторов на параллельную работу. Так возникла проблема обеспечения устойчивости параллельной работы синхронных машин, первоначально связанная с неравномерностью хода первичных двигателей, вращающих генераторы. Таким образом, впервые стала рассматриваться устойчивость во взаимосвязи электрической и механической части или в более широком смысле - электромеханические переходные процессы.
Дальнейшее развитие энергетики вызвало потребность передавать электроэнергию на значительные расстояния и объединять работу нескольких электростанций на общую сеть. При передаче энергии на значительные расстояния и при объединении электростанций на первых порах величина нагрузки линий электропередачи ограничивалась нагревом проводов и потерей напряжения. Однако затем на основе эксплуатационных наблюдений и теоретических исследований было выявлено, что существует предельное значение мощности, передаваемой по линии, прямо пропорциональное квадрату напряжения и обратно пропорциональное реактивному сопротивлению рассматриваемой системы электропередачи. Если нагрузка линии превзойдет это значение или напряжение на линии понизится, то электростанции, работающие в таком предельном режиме, выпадают из синхронизма. Это означает, что достигнут предел устойчивой работы энергосистемы. При нарушении устойчивости наблюдаются большие периодические изменения тока, напряжения, мощности (так называемые «качания»), при которых длительная работа станций и приемников энергии становится невозможной.
Изучение электромеханических переходных процессов позволило в 1930-х годах предложить ряд мероприятий по повышению устойчивости энергосистем Советского Союза. Именно в эти годы проводятся первые эксперименты по автоматическому повторному включению (АПВ) линий электропередачи после их отключения из-за перекрытия изоляции. При кратковременном отключении электрическая дуга гаснет в 70-80 % всех повреждений и не возникает вновь после обратного включения. Широко стала применяться автоматическая частотная разгрузка (АЧР) энергосистем, т. е. автоматическое отключение части приемников энергии при отключении источников питания или иных аварийных состояниях системы, сопровождающихся снижением частоты. Наиболее существенно были улучшены условия сохранения устойчивости энергосистем за счет использования автоматических регуляторов возбуждения (АРВ) синхронных машин.
В современных условиях объединенных энергосистем проблема сохранения устойчивости становится еще более актуальной. Объясняется это, прежде всего, все возрастающими катастрофическими последствиями системных аварий с нарушением устойчивости. Так на северо-востоке США в результате аварии 1965 года были отключены потребители мощностью 20 ООО МВт, а время восстановления электроснабжения составило 13 ч. В результате аварии в США 2003 года общая потеря нагрузки составила 61 800 МВт, отключилась 21 электростанция, включая 10 атомных. Без электроснабжения осталось 50 млн человек, проживающих на территории 24 тыс. км2.
Таким образом, по мере развития энергосистем вопросам обеспечения их устойчивой работы как при проектировании, так и при эксплуатации необходимо уделять должное внимание. Недостаточные или недостоверные исследования устойчивости энергосистем, несовершенство средств противоаварийного управления являются наиболее существенными причинами появления крупных системных аварий.
2. Основные понятия и определения
Под электроэнергетической (электрической) системой понимают электрическую часть энергосистемы и питающиеся от нее приемники электрической энергии, объединенные общностью процесса производства, передачи, распределения и потребления электроэнергии.
Электроэнергетическая система состоит из элементов, которые можно представить двумя группами:
- силовые элементы - вырабатывающие (например, генераторы, синхронные компенсаторы), преобразующие (трансформаторы, выпрямители), передающие и распределяющие (кабельные и воздушные линии электропередачи) и потребляющие (двигатели, осветительные установки, печи) электрическую энергию;
- элементы управления — регулирующие и изменяющие состояния системы (автоматические регуляторы, коммутационные аппараты, реле и т. п.).
Состояние системы, характеризующееся совокупностью условий и величин в какой-либо момент времени или на интервале времени, называется режимом системы. Режим характеризуется количественными показателями, которые называются параметрами режима. К ним относятся значения мощности, напряжения, частоты, тока, ЭДС и т. д. Параметры режима связаны между собой зависимостями, в которые входят параметры системы.
Параметры системы - это показатели, количественно определяющиеся физическими свойствами элементов системы, схемой их соединения, а также расчетными данными. К параметрам системы относятся сопротивления и проводимости элементов, коэффициенты трансформации, постоянные времени и т. д.
В качестве примера приведем известные выражения:
 где Р, U, Q,
где Р, U, Q,  - параметры режима; R,X- параметры системы.
- параметры режима; R,X- параметры системы.
Режим энергосистемы может быть установившимся или переходным, нормальным или аварийным. Причины, вызывающие изменение параметров режима, называются возмущающими воздействиями.
Различают следующие основные виды режимов электрических систем:
- нормальный установившийся режим, при котором обеспечивается снабжение всех потребителей электроэнергией надлежащего качества, а параметры режима могут приниматься неизменными;
- нормальный переходный режим, во время которого энергосистема переходит от одного нормального рабочего состояния к другому;
- аварийный переходный режим обусловлен возникновением аварийных ситуаций, при которых скорости изменения параметров настолько значительны, что они должны учитываться при эксплуатации энергосистем;
- аварийный установившийся режим, при котором не обеспечивается снабжение электроэнергией всех потребителей или (и) параметры режима не находятся в установленных допустимых пределах. В таких режимах требуется устранение аварийных условий;
- длительный переходный режим обусловлен возмущениями; при нем вступает в действие автоматика турбин, котлов электростанций, противоаварийная автоматика энергосистем, предпринимаются меры диспетчером по предотвращению развития аварии;
- восстановительный режим, при котором обеспечивается возврат системы к нормальному функционированию.
При переходе от одного режима к другому изменяется не только электромагнитное состояние системы, но изменяются и механические характеристики ее элементов (турбин, приводных механизмов). Это означает, что переходный процесс характеризуется совокупностью электромагнитных и механических изменений в системе, которые взаимно связаны и представляют собой единое целое. Поэтому изучение устойчивости базируется на рассмотрении электромеханических переходных процессов, происходящих в электроэнергетической системе.
Применительно к малым возмущениям введено понятие статической устойчивости. Статическая устойчивость — это способность электроэнергетической системы самостоятельно восстанавливать исходный установившийся режим после малых возмущений или режим, весьма близкий к исходному, если возмущение не снято.
Исходя из определения статической устойчивости системы, можно заключить, что существует такой режим, при котором очень малое увеличение нагрузки вызывает нарушение его устойчивости. Такой режим называют предельным, а нагрузки системы — максимальными или предельными нагрузками по условиям статической устойчивости.
Ограничение нагрузок может быть вызвано и другими факторами, например уровнями напряжения в узлах, нагревом генераторов, трансформаторов или линий электропередачи.
Пропускной способностью элемента электроэнергетической системы называют наибольшую мощность, которую можно передать через этот элемент с учетом всех ограничивающих факторов (устойчивости, нагрева, напряжения в узлах и т. п.). Иногда пропускную способность определяют только по одному фактору и говорят, например, о пропускной способности по статической устойчивости.
Аварийные режимы в электроэнергетической системе возникают также и при больших возмущениях, например, при КЗ на электрооборудовании с последующим отключением линий, трансформаторов, генераторов. При этом возникают значительные и резкие отклонения параметров режима от их исходного состояния. По отношению к большим возмущениям введено понятие динамической устойчивости.
Динамическая устойчивость - это способность электроэнергетической системы восстанавливать после большого возмущения исходное состояние или практически близкое к нему.
Если после возмущения синхронная работа генераторов или двигателей системы нарушается, а затем, по прошествию определенного, допустимого по условиям эксплуатации времени восстанавливается, то такую систему принято считать обладающей результирующей устойчивостью.
При исследовании устойчивости широко используются статические и динамические характеристики элементов системы. Под статическими характеристиками понимают аналитические или графические зависимости параметров режима, определенные при медленных их изменениях, когда каждый режим можно считать установившимся. Примером могут служить зависимости активной Р или реактивной О мощности нагрузки от напряжения U и частоты f.
P = F1(U,f); Q = F2(U,f).
Динамические характеристики - это зависимости параметров режима системы, определенные при быстрых изменениях режима с учетом времени и скорости его изменения.






