

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
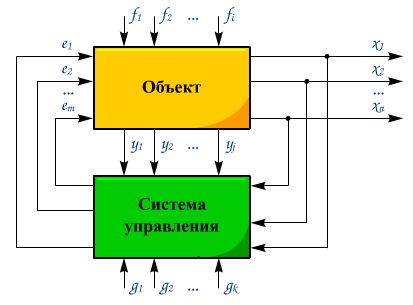
Рис. 8.1. Структурная схема системы автоматизации
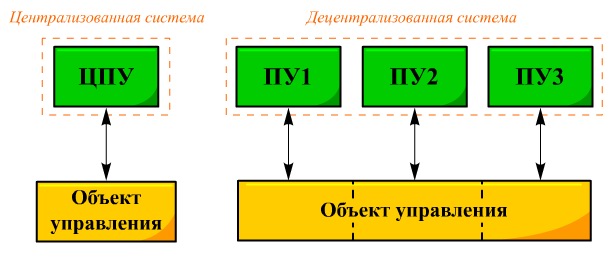
Рис. 8.2. Примеры одноуровневых систем управления
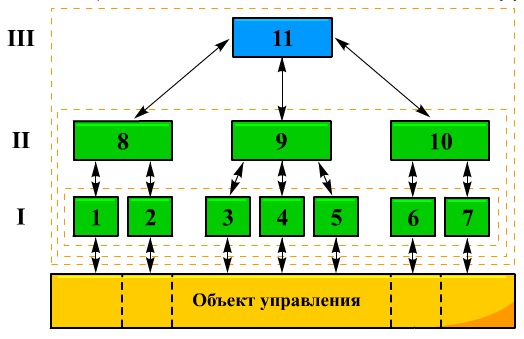
Рис. 8.3. Пример трехуровневой системы управления:
I - III - уровни управления
27. Понятие автоматических устройств. Основные понятия ТАУ. Линейные и нелинейные звенья. Линейные и нелинейные системы управления.
Автоматические системы обычно состоят из объектов контроля, управления и различных элементов автоматики. Основными элементами автоматики являются воспринимающие устройства (датчики), усилители, запоминающие, логические и преобразовательные устройства, реле, управляющие устройства — от простейших кнопок дистанционного управления до управляющих ЭВМ, исполнительные механизмы и регулирующие органы непосредственного воздействия на объект для изменения подачи вещества или энергии.
Основные понятия и определения:
ТАУ – это научная и техническая дисциплина, она изучает общие принципы системной организации на основе построения математических моделей объектов и систем управления. Это позволяет оценивать характеристики и свойства проектируемых систем, создавать системы, отвечающие заданным требованиям качества.
Анализ - исследование системы управления, путем построения ее математической модели и изучения свойств этой модели. Анализ проводится с целью выяснения вопроса о том, способна ли в принципе модель САР решать задачу управления, и если нет, то какими методами и средствами ее можно сделать работоспособной.
Синтез – (теоретическое конструирование) – это построение модели системы управления, обеспечивающей требуемое поведение объекта управления.
|
|
ТАУ (теория автоматического управления) – это научно-техническая дисциплина, изучающая и развивающая методы анализа и синтеза моделей систем управления.
Кибернетика – наука об управлении. Основывается на изучении процессов протекающих в объектах управления, на изучении того, как эти объекты реагируют на внешние воздействия и определении способов воздействия на объект с тем, чтобы оптимизировать его состояние и поведение. Объектами управления в кибернетике могут быть устройства, машины, живые организмы, их органы, коллективы людей, популяции животных и т.п.
Автоматическое управление – это осуществление совокупности воздействий, выбранных из множества возможных, на объект управления, с целью оптимизировать в определенном заданном смысле его состояние и поведение.
Автоматическое регулирование – это поддержание постоянной или меняющейся по некоторому закону во времени какой-то величины, характеризующей объект управления. Величина должна меняться требуемым образом вопреки препятствующим этому факторам
Объект управления (ОУ) в ТАУ – это устройство, машина или процесс и др., которые характеризуются некоторыми физическими величинами. Эти величины могут быть измерены. Объект управления способен воспринимать внешние воздействия и реагировать на них изменением значений выходных величин.
Состояние любого ОУ, которые можно характеризовать одной или несколькими физическими величинами. Физические величины, характеризующие состояние объекта управления называются выходными переменными объекта.
Задающая величина – величина, в соответствии с которой должна изменяться управляемая величина объекта. Эта величина подается на вход САР.
Возмущающая величина характеризует совокупность факторов, причин, воздействующих на объект управления и препятствующих его требуемому поведению. Эта величина моделирует неизбежные помехи, влияющие на поведение объекта управления.
Объектами управления в технике могут быть машины, механизмы, электромеханические устройства, более простые САР и др.
|
|
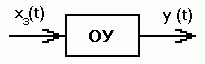
Рис. Обозначение объекта управления (ОУ) на функциональной схеме. x(t) - воздействие на объект, y(t) – реакция объекта, отклик на воздействие
Автоматическая система управления является нелинейной, если хотя бы один ее элемент описывается нелинейным уравнением.
Отличие нелинейных систем от линейных:
1. В нелинейных системах кроме уст. (рабочего) и неуст. (непригодного) режимов работы существует режим автоколебаний (рабочий), который может продолжаться неограниченно долго, характеризует нахождение системы в точности на границе устойчивости;
2. Для нелинейных систем не применим принцип суперпозиции.
3. Одна и та же нелинейная система при одних значениях входа может быть устойчивой, при других – неустойчивой.
4. Нет единого подхода к анализу и синтезу.
Практически все реальные системы управления содержат один или несколько нелинейных элементов. Нелинейной характеристикой часто обладает и объект управления. Так, например, все электрические машины имеют нелинейную и неоднозначную зависимость магнитного потока от тока возбуждения. Индуктивности обмоток машины также зависят от токов.
Некоторые нелинейные элементы вводят в систему преднамеренно, чтобы улучшить качество управления. Такими нелинейностями являются, например, релейные управляющие устройства, обеспечивающие высокое быстродействие процесса управления. Применяются также нелинейные корректирующие устройства.
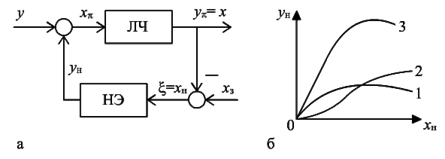
Рис. 8.1. Структурная схема нелинейной САУ (а) и характеристики НЭ (б)
Нелинейную САУ можно представить в виде соединения двух частей (рис. 8.1, а) – линейной части (ЛЧ), описываемой линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами, и нелинейного элемента (НЭ). Нелинейный элемент является безынерционным, и его входная и выходная величины связаны между собой нелинейными алгебраическими уравнениями. Если система содержит несколько нелинейных элементов, то ее в ряде случаев можно свести к рассматриваемому классу, заменив нелинейные элементы одним с результирующей статической характеристикой. Например, при параллельном, последовательном и встречно-параллельном соединении такая замена возможна. На рис. 8.1, б показана замена двух параллельно соединенных нелинейных звеньев со статическими характеристиками 1 и 2 одним звеном с характеристикой 3, полученной суммированием исходных характеристик по оси ординат.
|
|
Различают два вида нелинейных элементов: существенно нелинейные и несущественно нелинейные. Нелинейность считается несущественной, если ее замена линейным элементом не изменяет принципиальных особенностей системы и процессы в линеаризованной системе качественно не отличаются от процессов в реальной системе. Если такая замена невозможна, и процессы в линеаризованной и реальной системах сильно отличаются, то нелинейность является существенной.
Главная особенность существенно нелинейных систем заключается в том, что они не подчиняются принципу наложения, а форма и показатели переходного процесса зависят от величины и формы внешнего воздействия.
Другой важной особенностью динамики существенно нелинейных систем является зависимость условий устойчивости от величины внешнего воздействия. В связи с этим для нелинейных систем применяют понятия " устойчивость в малом", "устойчивость в большом", "устойчивость в целом ".
Система устойчива в малом, если она устойчива только при малых начальных отклонениях. Система устойчива в большом, если она устойчива при больших начальных отклонениях. Система устойчива в целом, если она устойчива при любых отклонениях.
Специфической особенностью существенно нелинейных систем является также режим автоколебаний. Автоколебания – это устойчивые собственные колебания, возникающие из-за нелинейных свойств системы. Режим автоколебаний нелинейной системы принципиально отличается от колебаний линейной системы на границе устойчивости.
В линейной системе при малейшем изменении ее параметров колебательный процесс становится либо затухающим, либо расходящимся. Автоколебания же являются устойчивым режимом и малые изменения параметров не приводят к их исчезновению.
Автоколебания в общем случае нежелательны, однако, в некоторых нелинейных системах они являются основным рабочим режимом.
|
|
28. Общий вид дифференциального уравнения звена системы. Применение преобразований Лапласа и получение передаточной функции и комплексного коэффициента усиления.
Основной характеристикой любой динамической системы, наиболее полно отражающей ее свойства, является дифференциальное уравнение.
Процессы, описывающие линейную САУ, соответственно, будут описываться линейным дифференциальным уравнением.
Общий метод составления дифференциального уравнения системы: для каждого звена автоматической системы в соответствии с его теорией составляют дифф.ур. связывающее его выходную величину с входной. В результате получают систему уравнений, количество которых равно числу звеньев. Входные и выходные величины – основные, остальные промежуточные, которые из системы исключаются при ее решении.
Уравнение линейного динамического звена имеет следующий общий вид:
|
Так как все функции и их производные стоят в первой степени, для такого дифференциального уравнения выполняется принцип суперпозиции, следовательно, такая система линейна.
Преобразование Лапласа
Соотношение
называют прямым преобразованием Лапласа. Комплексная переменная  называется оператором Лапласа, где
называется оператором Лапласа, где  - угловая частота,
- угловая частота,  - некоторое положительное постоянное число. Функция комплексной переменной
- некоторое положительное постоянное число. Функция комплексной переменной  называется изображением сигнала
называется изображением сигнала  по Лапласу. Операция определения изображения по оригиналу сокращенно записывается -
по Лапласу. Операция определения изображения по оригиналу сокращенно записывается -  , где
, где  - символ прямого преобразования Лапласа.
- символ прямого преобразования Лапласа.
Преобразование Лапласа обратимо, то есть, зная изображение по Лапласу, можно определить оригинал, используя соотношение обратного преобразования
Преобразование дифференциальных уравнений по Лапласу дает возможность ввести удобное понятие передаточной функции, характеризующей динамические свойства системы. Передаточной функцией называется отношение изображения выходного воздействия Y(р) к изображению входного X(р) при нулевых начальных условиях.
Передаточная функция является дробно-рациональной функцией комплексной переменной:
где:

Передаточная функция имеет порядок, который определяется порядком полинома знаменателя (n).
Из формулы (2.6) следует, что изображение выходного сигнала можно найти как
Так как передаточная функция системы полностью определяет ее динамические свойства, то первоначальная задача расчета САР сводится к определению ее передаточной функции.При расчете настроек регуляторов широко используются достаточно простые динамические модели промышленных объектов управления. В частности, использование моделей инерционных звеньев первого или второго порядка с запаздыванием для расчета настроек регуляторов обеспечивает в большинстве случаев качественную работу реальной системы управления. В зависимости от вида переходной характеристики (кривой разгона) задаются чаще всего одним из трех видов передаточной функции объекта управления:
|
|
1. В виде передаточной функции инерционного звена первого порядка:
где: К - коэффициент усиления,
Т - постоянная времени,
 - запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.
- запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.
2. Для обьекта управления без самовыравнивания передаточная функция имеет вид:
3. Более точнее динамику обьекта описывает модель второго порядка с запаздыванием:
Коэффициент усиления является одним из основных параметров электронных усилителей. Исходя из требований, которые предъявляются к параметрам выхода усилителя, выделяют следующие коэффициенты усиления: по напряжению, по току, по мощности. Коэффициент усиления, обычно обозначают буквой K, внизу справа добавляют индекс, указывающий параметр усиления.
29. Моделирование динамических процессов систем управления в частотной области. Операции с комплексными переменными. Понятие комплексного коэффициента усиления, амплитудночастотной и фазочастотной характеристик.
Арифметические операции над комплексными числами были определены в предыдущем пункте. Эти операции обладают следующими свойствами:
| z 1 + z 2 = z 2 + z 1 |
для любых 

 .
.
| (z 1 + z 2) + z 3 = z 1 + (z 2 + z 3) |
для любых  .
.
| z + 0 = z |
для любого z .
| z 1 z 2 = z 2 z 1 |
для любых .
| (z 1 z 2) z 3 = z 1(z 2 z 3) |
для любых  .
.
| z 1(z 2 + z 3) = z 1 z 2 + z 1 z 3 |
для любых .
| z · 1 = z. |
 и
и  существует такое число z, что
существует такое число z, что  Такое число z называется частным двух комплексных чисел и обозначается
Такое число z называется частным двух комплексных чисел и обозначается  Деление на 0 невозможно.
Деление на 0 невозможно.
Коэффициент усиления является одним из основных параметров электронных усилителей. Исходя из требований, которые предъявляются к параметрам выхода усилителя, выделяют следующие коэффициенты усиления: по напряжению, по току, по мощности. Коэффициент усиления, обычно обозначают буквой K, внизу справа добавляют индекс, указывающий параметр усиления.
Амплиту́дно-часто́тная характери́стика (АЧХ) — зависимость амплитуды выходного сигнала некоторой системы от частоты её входного гармонического сигнала. Иногда эту характеристику называют «частотным откликом системы».
АЧХ в теории автоматического управления
АЧХ в математической теории линейных стационарных систем описывает зависимость модуля комплексной передаточной функции линейной системы от частоты. Значение АЧХ при некоторой частоте указывает, во сколько раз амплитуда сигнала на выходе системы отличается от амплитуды входного сигнала на этой же частоте.
На графике АЧХ в декартовых координатах по оси абсцисс откладывается частота, а по оси ординат — отношение амплитуд выходного и входного сигналов системы.
Обычно для оси частоты используется логарифмический масштаб, так как отображаемый диапазон частот может изменяться в достаточно широких пределах (от единиц до миллионов герц или рад/с). В случае, когда логарифмический масштаб используется и на оси ординат, АЧХ принято называть логарифмической амплитудно-частотной характеристикой.
ЛАЧХ широкое применяется в теории автоматического управления в связи с простотой построения и наглядностью при исследовании поведения систем автоматического регулирования.

Фа́зочасто́тная характеристика (ФЧХ) — зависимость разности фаз между выходным и входным сигналами от частоты сигнала, функция, выражающая (описывающая) эту зависимость, также — график этой функции.
Для линейной электрической цепи, зависимость сдвига по фазе между гармоническими колебаниями на выходе и входе этой цепи от частоты гармонических колебаний на входе.
Часто ФЧХ используют для оценки фазовых искажений формы сложного сигнала, вызываемых неодинаковой задержкой во времени его отдельных гармонических составляющих при их прохождении по цепи.
Определение ФЧХ
В теории управления ФЧХ звена определяется тангенсом отношения мнимой части передаточной функции к действительной.
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!