Изодромный закон регулирования имеет вид:
u (t)= W рег(p) x (t)=(k 1+ k 2/ p) x (t),
тогда в разомкнутом состоянии система будет характеризоваться ПФ:
W (p)= W рег(p) W о(p)=(k 1+ k 2/ p) W о(p).
В этом случае если p →0, то W (p)→∞ и регулирование будет астатическим. Но если p →∞, то W (p)→ k 1 k о= k и регулирование будет пропорциональным.
Резюме: PI-регулирование сочетает точность I-регулирования и быстродействие P-регулирования.
 Регулирование с использованием производных
Регулирование с использованием производных
Регулирование с использованием одного канала, чувствительного к производной сигнала не имеет самостоятельного значения, т.к. сигнал управления:
u (t)= W рег(p) x (t)= k 4 p × x (t),
будет равен нулю при p →0 (т.е. в установившемся режиме). Поэтому обязательно наличие параллельного либо P, либо I-канала, а чаще обоих:
u (t)=(k 1+ k 2/ p + k 4 p) x (t).
В таком варианте регулятора управляющее воздействие будет образовываться даже когда x (t)=0, но dx / dt ≠0. Т.е. наличие параллельного D-канала в регуляторе повышает быстродействие системы и снижает ошибки в динамике.
Сегодня техническая реализация регуляторов, чувствительных к производным более высоких порядков, затруднена.

13. Законы управления. Понятие закона управления. Виды регуляторов, работающих по нелинейным законам управления.
Закон управления - это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде
u(t) = F(x, g, f), (8.1)
где F - некоторый оператор от отклонения x, задающего воздействия g и возмущающего воздействия f, а также от их производных и интегралов по времени.
Обычно выражение (8.1) может быть записано следующим образом:
u(t) = F1(x) + F2(g) + F3(f). (8.2)
Здесь первое слагаемое соответствует управлению по отклонению, второе и третье - управлению по внешнему воздействию.
В зависимости от вида оператора F законы управления делятся на стандартные и специальные.
Стандартные законы управления - это универсальные законы, с помощью которых можно решать задачи автоматизации разнообразных технологических процессов и объектов.
Специальные законы управления - это законы, формируемые для решения конкретных задач.
Зависимость, по которой формируется регулирующее воздействие u (t) на объект из первичной информации: g (t) и/или x (t) и, возможно, f (t).
Законы регулирования бывают:
· линейные:
 ;
;
· нелинейные: F 1(u, du / dt,…)= F 2(x, dx / dt,…; g,…; f,…).
Классификация нелинейных законов регулирования:
1. Функциональные.
2. Логические.
3. Параметрические.
4. Оптимизирующие.
 Примеры статических функциональных нелинейностей в законах:
Примеры статических функциональных нелинейностей в законах:
u = k (1+ b | x |) x, u =sign(x) k sqrt(1+ b | x |).
Примеры динамических функциональных нелинейностей в законах:
u = k (1± b | x ′|) x, u = k (1± b | x |) x ′.
 Пример логического нелинейного закона:
Пример логического нелинейного закона:
| Если | x |<0.2 Gm, тогда u = k 1 x; Если | x |>0.2 Gm, тогда u = k 2 x; где: k 1< k 2
|
 Пример параметрического нелинейного закона:
Пример параметрического нелинейного закона:
u = k (t [° C ]; h [м]; G [кг]) x.
Пример оптимизирующего нелинейного закона:
u = k (min(СО2);max(КПД)) x.
14. Понятие звена системы. Линейные и нелинейные звенья. Линейные и нелинейные системы управления. Примеры линейных и нелинейных регуляторов.
Элементарное звено – неделимое звено, имеющее по одному входу и выходу, описываемое дифференциальным уравнением не выше второго порядка и пропускающее сигнал только в одном направлении.
Наиболее удобно классифицировать типовые звенья, используя частные формы линейного дифференциального уравнения второго порядка, представленного ниже:
a0 y′′(t) + a1 y′(t) + a2 y(t) = b0 x′(t) + b1 x(t) (1.63.)
САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной совокупности отдельных элементов – динамических звеньев.
Автоматическая система управления является нелинейной, если хотя бы один ее элемент описывается нелинейным уравнением.
Отличие нелинейных систем от линейных:
1. В нелинейных системах кроме уст. (рабочего) и неуст. (непригодного) режимов работы существует режим автоколебаний (рабочий), который может продолжаться неограниченно долго, характеризует нахождение системы в точности на границе устойчивости;
2. Для нелинейных систем не применим принцип суперпозиции.
3. Одна и та же нелинейная система при одних значениях входа может быть устойчивой, при других – неустойчивой.
4. Нет единого подхода к анализу и синтезу.
Практически все реальные системы управления содержат один или несколько нелинейных элементов. Нелинейной характеристикой часто обладает и объект управления. Так, например, все электрические машины имеют нелинейную и неоднозначную зависимость магнитного потока от тока возбуждения. Индуктивности обмоток машины также зависят от токов.
Некоторые нелинейные элементы вводят в систему преднамеренно, чтобы улучшить качество управления. Такими нелинейностями являются, например, релейные управляющие устройства, обеспечивающие высокое быстродействие процесса управления. Применяются также нелинейные корректирующие устройства.
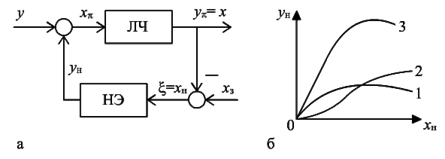
Рис. 8.1. Структурная схема нелинейной САУ (а) и характеристики НЭ (б)
Нелинейную САУ можно представить в виде соединения двух частей (рис. 8.1, а) – линейной части (ЛЧ), описываемой линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами, и нелинейного элемента (НЭ). Нелинейный элемент является безынерционным, и его входная и выходная величины связаны между собой нелинейными алгебраическими уравнениями. Если система содержит несколько нелинейных элементов, то ее в ряде случаев можно свести к рассматриваемому классу, заменив нелинейные элементы одним с результирующей статической характеристикой. Например, при параллельном, последовательном и встречно-параллельном соединении такая замена возможна. На рис. 8.1, б показана замена двух параллельно соединенных нелинейных звеньев со статическими характеристиками 1 и 2 одним звеном с характеристикой 3, полученной суммированием исходных характеристик по оси ординат.
Различают два вида нелинейных элементов: существенно нелинейные и несущественно нелинейные. Нелинейность считается несущественной, если ее замена линейным элементом не изменяет принципиальных особенностей системы и процессы в линеаризованной системе качественно не отличаются от процессов в реальной системе. Если такая замена невозможна, и процессы в линеаризованной и реальной системах сильно отличаются, то нелинейность является существенной.
Главная особенность существенно нелинейных систем заключается в том, что они не подчиняются принципу наложения, а форма и показатели переходного процесса зависят от величины и формы внешнего воздействия.
Другой важной особенностью динамики существенно нелинейных систем является зависимость условий устойчивости от величины внешнего воздействия. В связи с этим для нелинейных систем применяют понятия " устойчивость в малом", "устойчивость в большом", "устойчивость в целом ".
Система устойчива в малом, если она устойчива только при малых начальных отклонениях. Система устойчива в большом, если она устойчива при больших начальных отклонениях. Система устойчива в целом, если она устойчива при любых отклонениях.
Специфической особенностью существенно нелинейных систем является также режим автоколебаний. Автоколебания – это устойчивые собственные колебания, возникающие из-за нелинейных свойств системы. Режим автоколебаний нелинейной системы принципиально отличается от колебаний линейной системы на границе устойчивости. В линейной системе при малейшем изменении ее параметров колебательный процесс становится либо затухающим, либо расходящимся. Автоколебания же являются устойчивым режимом и малые изменения параметров не приводят к их исчезновению.
Автоколебания в общем случае нежелательны, однако, в некоторых нелинейных системах они являются основным рабочим режимом.
Системы управления называют линейными, если выполняются принцип суперпозиции. Если этот принцип несправедлив, то систему называют нелинейной.
Сущность принципа суперпозиции заключается в том, что линейной комбинации произвольных входных сигналов  соответствует линейная комбинация соответствующих выходных сигналов:
соответствует линейная комбинация соответствующих выходных сигналов:  .
.
Принцип суперпозиции всегда выполняется, если выполняются следующие два условия:
1) при суммировании любых двух входных сигналов соответствующие выходные сигналы суммируются;
2) при любом увеличении (уменьшении) входного сигнала без изменения его формы выходной сигнал увеличивается (уменьшается) во столько же раз, также не изменяя своей формы.
Оператор  , соответствующий линейной системе, называют линейным оператором. Примерами линейных операторов могут служить операторы дифференцирования или интегрирования:
, соответствующий линейной системе, называют линейным оператором. Примерами линейных операторов могут служить операторы дифференцирования или интегрирования:
 ,
,  .
.





