

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
А.13.1 Описание
Развитие лазерной интерферометрии обеспечило станкостроение высокоточным средством измерения, которое можно использовать в качестве эталона для контроля станков всех типов и размеров. Таким средством измерения является интерферометр со стабилизированным гелий-неоновым лазером. В настоящее время он является общепринятым средством для линейных и угловых измерений.
А.13.2 Точность
Погрешность интерферометра определяется длиной волны лазера и составляет менее половины миллионной части от длины измеряемого перемещения.
С помощью лазерного интерферометра можно проводить измерения в направлении пяти из шести степеней свободы: линейное позиционирование, горизонтальную прямолинейность, вертикальную прямолинейность, тангаж и рыскание по направлению движения, а также перпендикулярность между осями. Все шесть степеней свободы одинаково важны, поскольку для погрешности позиционирования, являющейся результатом совместного влияния угловых смещений или непрямолинейности перемещений, потенциально могут превосходить погрешности собственно линейного позиционирования по координатной оси.
Другие источники погрешностей, которые следует учитывать до начала измерений:
a) погрешности, вызванные окружающей средой.
При проведении линейных измерений необходимо знать, что абсолютная точность лазерного интерферометра напрямую определяется состоянием окружающей среды, а на деле тем, насколько она стабильна. Погрешность приблизительно в одну миллионную часть измеряемой длины будет возникать при каждом из следующих факторов: изменении температуры окружающей среды на 1 °С, изменении абсолютного давления на 2,5 мм ртутного столба, изменении относительной влажности на 30 %. Эти погрешности могут быть частично преодолены при помощи компенсации вручную либо при помощи одного из автоматических компенсаторов, которые можно подсоединять к отсчетному устройству лазерного интерферометра.
|
|
Однако самым важным является поддержание стабильных условий в период испытаний;
b) температура самого станка.
Другим значительным источником погрешности при интерферометрической оценке точности станка является влияние температуры самого станка. Для станков, в которых используется стальной ходовой винт для перемещения элементов станка, коэффициент линейного расширения которого составляет 0,0000108, при длине ходового винта 1000 мм увеличение температуры на 1 °С приведет к изменению длины ходового винта на 0,0108 мм, что повлияет на точность перемещения;
c) погрешность «мертвой зоны».
Погрешность «мертвой зоны» - это погрешность, вызванная изменением условий окружающей среды во время проведения измерений и обусловлена наличием некомпенсируемой длины хода лазерного луча, которая возникает при атмосферных условиях в зоне распространения лазерного луча (вызывает изменение длины волны лазерного луча), а также при колебании температуры элементов, на которых закреплены интерферометр и ретроотражатель (приводит к увеличению или уменьшению расстояния между интерферометром и ретроотражателем (см. рисунок А.23).

1 - источник лазерного излучения; 2 - интерферометр; 3 - нулевая точка; 4 - «мертвая зона» L 1;
5 - длина измерения L 2; 6 - ретроотражатель
Рисунок А.23 - Структура устройства, обеспечивающего минимизацию
погрешности «мертвой зоны»
«Мертвая зона» измерительной трассы лазера - расстояние между оптическим интерферометром и положением ретроотражателя, соответствующим началу счета интерференционных полос (нулевой точкой) (L 1). Т.к. измеряемый отрезок длины L 2 определяется по смещениям интерференционных полос, произошедшим после «обнуления», то компенсация изменения длины волны лазерного излучателя, вызванного нестабильностью окружающих условий, возможна только на отрезке L 2. Однако даже при неподвижных относительно друг друга интерферометре и ретроотражателе происходят смещения интерференционных полос (и соответственно их счет), вызванные изменением длины волны на всей трассе (L 1 + L 2). Таким образом, наличие «мертвой зоны» приводит к некомпенсированной погрешности, причем ее величина пропорциональна длине этой зоны. Поэтому интерферометр необходимо устанавливать как можно ближе к точке начала отсчета (нулевой точке);
|
|
d) косинусная погрешность.
Отклонение траектории луча лазера от оси перемещения элемента станка приводит к погрешности между измеренным расстоянием и фактической длиной перемещения. Это отклонение называется косинусной погрешностью, потому что величина этой погрешности пропорциональна косинусу угла отклонения между лучом и перемещением.
При рассогласовании системы лазерного измерения с осью перемещения элемента станка косинусная погрешность вызовет уменьшение измеренного расстояния от его фактической величины (см. рисунок А.24).

1 - лазерный интерферометр; 2 - отражатель (рефлектор) с плоским зеркалом
Рисунок А.24 - Косинусная погрешность
Расстояние, измеренное системой лазерного интерферометра, обозначено L LMS, фактическое расстояние перемещения станка L M. Вычерчивая дугу радиуса L LMS с центром в точке А, увидим, что L LMS короче L M.
Единственный способ исключения косинусной погрешности заключается в тщательной установке прибора перед выполнением измерений;
е) погрешности от поперечного смещения (несоблюдения принципа Аббе).
Если линия измерения смещена в поперечном направлении относительно траектории проверяемой точки перемещаемого элемента, то любое угловое смещение перемещаемого элемента приведет к дополнительной погрешности (см. рисунок А.25). Эта погрешность является следствием нарушения «принципа Аббе».
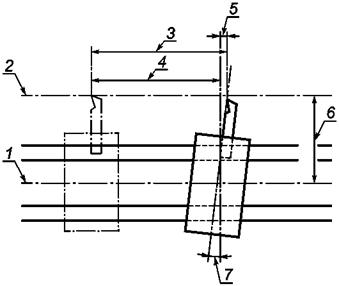
1 - линия измерения; 2 - траектория вершины режущего инструмента; 3 - фактическое расстояние;
4 - измеренное расстояние; 5 - погрешность; 6 - величина смещения; 7 - угловая погрешность
Рисунок А.25 - Погрешности от поперечного смещения (несоблюдения принципа Аббе)
При оценке погрешности, вызванной поворотом перемещаемого элемента, следует помнить, что на каждую угловую секунду поворота элемента приходится погрешность около 5 мкм на 1 м величины поперечного смещения траектории точки от линии измерения. Например, при величине смещения 200 мм поворот на 2 угловых секунды приводит к погрешности измерения перемещения 2 мкм:
|
|

А.13.3 Внимание!
При наладке системы лазерного измерения при испытании станка следует руководствоваться тремя основными правилами:
a) выбрать правильную наладку для измерения желаемых параметров;
b) сократить до минимума влияние источников потенциальных погрешностей (погрешности, вызванные окружающей средой, температурой самого станка, погрешностью «мертвой зоны» и т.п.);
c) обеспечить максимальное приближение условий измерения к условиям работы элементов станка. Каждая отдельная наладка при измерении должна быть тщательно проанализирована, имея в виду, что выявленные погрешности станка в конечном итоге приведут к погрешностям обрабатываемой на станке детали. Измерения должны максимально имитировать относительные перемещения режущего инструмента и обрабатываемой детали. Всегда следует устанавливать один элемент оптического измерительного прибора на позиции режущего инструмента, а другой - на позиции обрабатываемой детали.
Лазерный интерферометр следует располагать так, чтобы осуществлять максимальное число измерений без его перестановки. Несмотря на чрезвычайно высокую точность измерений, получаемых с помощью лазерных систем, необходимо иметь в виду, что их достоверность зависит от тщательности настройки средств измерения перед измерением и исключения возможных погрешностей.
Приложение ДА
(справочное)
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!