Процесс обучения обычно рассматривается как коммуникативный процесс передачи информации от преподавателя (обучающегося устройства) к ученику.
Между обучением и управлением имеется прямая аналогия: и то, и другое связано с целенаправленным изменением состояния объекта (обучение или управление), которое осуществляется воздействием (обучающим или управляющим). Представим процесс обучения как управление состоянием памяти студента. Рассмотрим специфику и отличие процессов обучения и самообучения [35].
Обучение. Под обучением понимают такое взаимодействие между объектом обучения (студентом) и обучающим устройством (преподавателем), которое моделирует их взаимоотношение, отличающиеся наличием двух чередующихся и четко определенных фаз: фазы передачи информации (рис. 5.13, а) и фазы контроля (рис. 5.13, б).
а)

б)

Рис. 5.13. Фазы передачи информации (а) и контроля (б)
Однако опыт схемы традиционного обучения настолько велик, что его целесообразно подвергнуть компьютеризации, разработав компьютерную технологию обучения. Общая схема управления приведена на рис.5.14 Рассмотрим ее, чтобы далее использовать введенные категории управления для оптимальной организации процесса обучения.

Рис. 5.14. Схемы управления обучением
Объект управления является трехполюсником, связывающим состояние среды Х, управления U1’ и объекта Y:

где F 0 – оператор реального объекта; Dx и Dy – управляемые системы сбора информации о состоянии среды и объекта соответственно, которые преобразуют эти состояния в информацию; U 2 и U 3 – управления, с помощью которых изменяются системы сбора информации (например, периодичность измерений, переключение измеряемых каналов в многоканальной системе и т. д.).
Управляющее устройство вырабатывает управление U = (U 1, U 2, U 3) на основе полученной информации  и
и  , а также заданной цели выделенного на управления ресурса R и алгоритма управления, позволяющего синтезировать
, а также заданной цели выделенного на управления ресурса R и алгоритма управления, позволяющего синтезировать

где Ф – заданный алгоритм управления; 
Исполнительный механизм (ИМ) преобразует информацию об управлении U 1 в управляющее воздействие  .
.
Цель управления Z * задается на состояниях среды (Х) и объекта (Y).
Самообучение. Отличается от обучения отсутствием преподавателя и, следовательно, этапа передачи информации (рис. 5.15).

Рис.5.15. Фазы передачи информации при самообучении
Задача в виде вопроса генерируется средой. Ее решение (ответ студента) сообщается среде, которая на него реагирует. Эта реакция может иметь самый разнообразный характер: от поощрения или наказания (в зависимости от ответа) до подсказки, как следовало решать поставленную задачу.
Формальная модель обучения. Схема обучения как управления [35], приведена на рис. 5.16. Здесь студент (обозначен пунктиром) представлен памятью (Y – состояние его памяти) и генератором ответов (ГО), на выходе которого появляются ответы Y’ на вопросы U2 ’, заданные обучающим устройством (ОУ).

Рис. 5.16. Схема обучения как управления
Обучающая информация (ОИ) представляет собой набор знаний, навыков, умений, т. е. порции информации, в определенной предметной области. Моделью предметной области является граф
Г = { A, B },
узлами которого А = (а 1, …,аn) являются его информативные единицы (элементы, предметы, понятия, приемы, навыки, умения), а ребрами B = ||bij||n×n – взаимообусловливающие связи между узлами. Здесь bij – вид, характер и специфика связи между аi и аj. Целью обучения является отображение графа предметной области в памяти студента и владение им этим графом для решения поставленных задач.
В простейшем случае матрица В определяет бинарный граф, ограничивающий подачу материала студенту. Его отличает лишь отсутствие циклов. В частном случае этот граф определяется тем курсом, который должен усвоить студент [7].
Процесс обучения заключается в выборе порции обучающей информации, которая необходима данному студенту. Для этого ОУ вырабатывает U 1 – номер порции ОУ, а блок насыщения семантикой (БНС) выдает . – порцию аi из ОИ (если U 1 = i).
Для синтеза U 1 необходимо иметь модель объекта обучения. Для простоты будем считать, что она неизменна и благоприятна. Тогда состояние среды можно исключить из рассмотрения, т. е.

где  – оператор модели студента.
– оператор модели студента.
Идентификация модели производится путем тестирования состояния памяти Y студента задачами  .
.
Решение задачи студентом определяется его состоянием

где D – оператор генератора ответа на вопрос при состоянии Y.
Зная состояния памяти Y студента, всегда можно определить, как решит он задачу . Именно это знание отражает оператор D. Сами задачи генерируются генератором задач по команде тестирования U 2, указывающей, какую именно задачу следует выдать студенту.
Цель обучения Z * формируется в виде

Интерпретируется эта цель следующим образом:
 – уровень знаний i- го характера, который должен быть хуже заданного;
– уровень знаний i- го характера, который должен быть хуже заданного;
 – знаний j- го характера, обязательный для каждого студента;
– знаний j- го характера, обязательный для каждого студента;
 – показатель эффективности процесса обучения l-й порции обучающей информации.
– показатель эффективности процесса обучения l-й порции обучающей информации.
Эти функционалы определяют цели потребителя системы обучения, и при их достижении удовлетворяют его потребности.
Подставив модельное представление о студенте 5.1 в 5.2, с учетом выделенного ресурса R получим задачу



решение, которой позволяет синтезировать порцию обучающей информации U 1, которую следует усвоить данному студенту. Выражение(5.3) является многокритериальной задачей оптимизации

где  множество допустимых обучений.
множество допустимых обучений.
Линейная свертка позволяет свести задачу к однокритериальной:

где  вес 1-го критерия.
вес 1-го критерия.
Алгоритм оптимизации φ является алгоритмом обучения, с помощью которого определяется оптимальное обучение  .
.
Модель самообучения. Схема самообучения [3] представлена на рис. 5.17. Здесь ведущим фактором являются вопросы U 2, задаваемые студенту, а обучение происходит в виде подсказки U 1 при неправильном его ответе.

Рис. 5.17. Схема самообучения
Структура подсказки имеет вид тройки

где X – состояние среды;  – правильный ответ на вопрос U 2.
– правильный ответ на вопрос U 2.
Это означает, что обучение при самообучении происходит путем указания, как надо правильно отвечать () на вопрос (U 2) в данной ситуации (Х).
Алгоритм φ самообучения решает задачу выбора вопроса:
U 2 = φ (Ŷ, Z *), (5.4)
где Ŷ – оценка состояния обучаемого, которая производится на основе его модели

где F – заданный оператор модели студента; С = (с 1,…, с k) – его параметры.
Эти параметры изменяются адаптивно под воздействием двух факторов – подсказки U 1 и ответа Y ’ на заданный вопрос U 2:
СN +1 = CN +Δ СN +1, (5.11)
где Δ СN +1 = ψ (U 1, U 2, ), а ψ – алгоритм адаптивной коррекции параметров модели студента по его ответам на заданный вопрос.
Решение задачи самообучения сводится к определению алгоритма φ (5.4) выбора вопроса U 2 студентом и алгоритма адаптации ψ параметров С его модели студента.
Алгоритм φ сводится к выбору такого вопроса, знание ответа на который максимально приблизит студента к цели обучения (Q ® min), например в виде Q ≤ Q *, где Q * – заданный порог (допустимый уровень недоученности).
Пусть число вопросов ограничено:
U 2Î { u 21,…, u 2m}
и состояние студента определяется вектором
Y = (y 1,…, ym), (5.13)
Где 
т. е. Y – бинарный вектор.
Тогда выбор наилучшего вопроса U 2* определяется выражением U 2* = u 2 j, причем
j =  ,
,
где Yi – вектор (5.13), у которого yi = 0, а множество номеров V соответствует значениям координат Y, т.е. тем вопросам, на которые студент еще не отвечал.
Алгоритм коррекции ψ определяет правило изменения параметра С, характеризующее специфику памяти студента. Например, оценку скорости забывания (усвоения) элементов информации, полученных в процессе обучения [2, 5].
7. Структура авиационной транспортной системы (АТС). Обобщенная структура авиационного тренажера (АТ). Классификация АТ.
АТС представляет собой сложный человеко-машинный комплекс (ЧМК) объединяющий в интересах единой цели большое
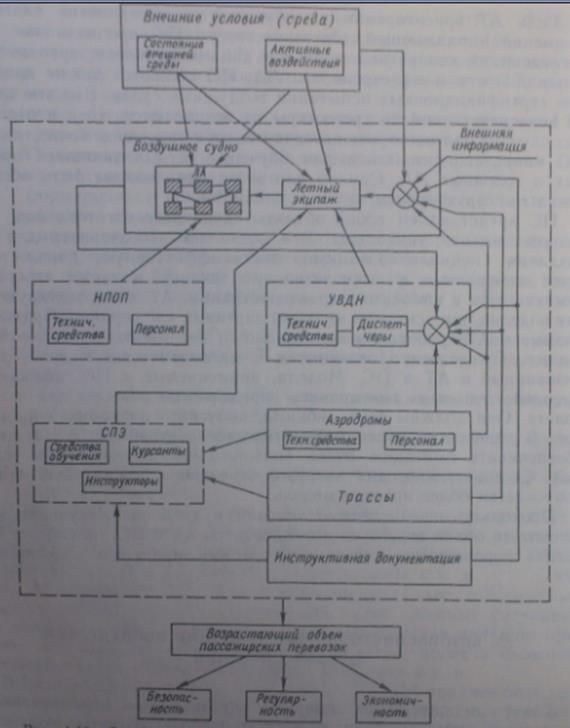
Рис. 1.10. Структура авиационной транспортной системы и внешние условия
Обобщенная структурная схема АТ.

• РМО – рабочее место обучаемого;
• РМИ – рабочее место инструктора;
• ИПНО – имитатор пилотажно-навиганационного оборудования;
• СИКП – система имитации кинематических параметров;
• СИВВО – система имитации внешней визуальной обстановки;
• СИАП – система имитирования акустических параметров;
• ИСУЛА— имитатор системы управления летательным аппаратом;
• СОИИ— система отображения информации инструктора;
• АКУО — аппаратура контроля и управления обучением;
• КЗА – контрольно-записывающая аппаратура;
• ИИС – измерительно-информационная система;
Классификация АТ по назначению и объему решаемых задач.
ПАТ -Авиационные тренажеры, которые предназначены для приобретения устойчивых навыков конкретных видов деятельности оператора в кабинах со сложным оборудованием и большим числом управляющих органов, а также отработки отдельных важных последовательностей процедур управления.
i. Главная цель ПАТ – отработка автоматизма в моторных действиях операторов. Зачастую используют статичные ПАТ, в них отсутствует система имитации внешней визуальной обстановки, при этом все необходимые пилотажные приборы и средства сигнализации воспроизводятся с большой точностью
КАТ -Авиационные тренажеры, которые предназначены для формирования и отработки твердых навыков пилотирования у пилотов, а также выполнения рабочих функций, осуществляемых другими членами экипажа на всех или на наиболее важных этапах полета.
• КАТ используют для подготовки экипажей магистральных самолетов и тяжелых вертолетов, отличаются наибольшей полнотой имитации режимов полета и воспроизведения функциональных систем воздушного судна.
САТ - Авиационные тренажеры, которые предназначены для развития профессиональных навыков у отдельных членов экипажа, например, штурмана.
• В ряде случаев САТ полностью воспроизводят рабочее место конкретного члена экипажа на ЛА и имитируют все те режимы полета, на которых используется данное оборудование.
8. Концептуальная модель «человека-оператора», образ полета.
Концептуальная модель
В соответствии с представлениями классиков психофизиологии
цель действий человека-оператора выступает как важнейший элемент
деятельности в виде образа-цели, тесно связанного с "опережающим
отражением" [6...8]. В последующем это понятие было расширено до
более общего понятия концептуальной модели [86].
Концептуальная модель — это мыслительная модель цели действия
и ситуации, т.е. отражение реальной действительности (в части
решаемой задачи) в сознании человека. Согласно ГОСТ 21033—75
концептуальная модель представляет собой совокупность
представлений человека-оператора о целях и задачах трудовой деятельности и
состояниях предмета труда, системы человек — машина, внешней
среды и способах воздействия на них.
Из приведенного определения следует, что концептуальная модель
содержит относительно постоянную часть, образуемую знаниями,
умениями, полученными в предшествующем обучении и
предшествующей профессиональной деятельности.
Другая часть концептуальной модели — оперативная, быстро
меняющаяся. Это представления о текущем состоянии и ближайшем
развитии событий, очередной цели, образующиеся как за счет
информационной модели, органов чувств, так и за счет постоянной
концептуальной модели, т.е. знаний, опыта, существа решаемой задачи.
Концептуальная модель, как всякая мыслительная модель,
недоступна для непосредственного наблюдения. О ее характере
приходится судить косвенно по структуре деятельности оператора, его
психофизиологической напряженности.
Правильной считается концептуальная модель, приводящая к
правильным решениям, позволяющая достигнуть конечной цели
каждого этапа управления с соблюдением определенных нормативов
и ограничений. Правильность концептуальной модели не означает ее
стереотипность, однозначность. Напротив, согласно фундаменталь^-
ным психофизиологическим концепциям [6...8, 19, 115] человек,
стремясь решить относительно сложную задачу наилучшим образом,
каждый раз в новых условиях действует по-новому. Разные
операторы могут иметь различные в деталях концептуальные модели,
соответствующие индивидуальным манерам управления.
ТСО теоретической подготовки должны обеспечивать
формирование главным образом постоянных концептуальных моделей, а ТСО
практической подготовки, тренажеры — формирование оперативных
концептуальных моделей.
9. Безопасность полета: градации последствий особых ситуаций (ОС), количественные критерии оценки ОС
Безопасность полета представляет собой свойство АТС осуществлять воздушные перевозки или другие летные операции на ЛА конкретного типа (типов) в течение определенного периода времени во всей области ОУЭ с малой вероятностью возникновения* потенциальной либо прямой угрозы для жизни и здоровья людей, находящихся на борту, и с крайне малой вероятностью нанесения ущерба людям, материальной части или наземным сооружениям.
Исходя из данного определения, полет ЛА в самом общем случае может быть сведен к двум типам режимов. Первый объединяет «штатные» режимы, выполняемые в соответствии с плановыми заданиями, в которых угрозы безопасности нет. Ко второму типу относятся достаточно редкие, но исключительно важные «особые ситуации», в которых возникает прямая или потенциальная угроза снижения безопасности, а в предельном случае — при авариях или катастрофах — наносится непосредственный ущерб материальной части, сооружениям или людям.
Приближенная схема развития ОС при возникновении «нештатных» условий показана на рис. 1.11. Она иллюстрируется изменением некоей характеристики, оказывающей важное влияние на протекание процесса. Процесс возникновения ОС, ее развитие, последующее завершение полета с теми или иными последствиями могут быть условно разделены на четыре фазы, указанные на схеме. Исходные условия определяются «штатным» режимом, предшествующим возникновению начального отказа. Далее показан участок проявления отказа (отказов), условно названный «начальной стадией ОС».
Следующая фаза — «развитие ОС». На этой фазе срабатывает сигнализация и предпринимаются действия экипажа по 'парированию возмущений ~от исходных причин. Заметим,“ что вследствие ухудшения устойчивости, управляемости, маневренности или иных качеств (если такое ухудшение происходит), влияние внешних факторов на динамику полёта может заметно возрасти по сравнении со «штатным» режимом. Затем, в большинстве случаев, имеет место участок «завершения полета», протекание которого и продолжительность зависят от конкретных условий ОС; характеристик, реализованных на предшествующих фазах полета, и, что очень важно, от четкости действий экипажа. Альтернативные последствия ОС – аварийные и катастрофические ситуации, замыкающие процесс,— будут рассмотрены ниже.

Рис. 1.Ц. Схема, иллюстрирующая возникновение и развитие ОС
различного типа:
1 — «Штатный» режим, 2 — Начальная стадия ОС, 3 — Развитие ОС, 4 — Завершение полета; А — эксплуатационные ограничения, Б — I предельные ограничения, В — II предельные ограничения; а — усложнение.условий полета, б — сложная ситуация, в — аварийная ситуация, г — катастрофическая ситуация
Рассмотрим вначале методологию оценки критериев безопасности по материалам длительной эксплуатации воздушных судов, т. е. по статистическим данным, полученным из обработки результатов реальных полетов и летных происшествий. В этом случае критерии определяются для некоего заданного календарного интервала времени Гкал, например года или, в пределе, всего жизненного цикла рассматриваемого типа ЛА. Учитываются результаты эксплуатации определенного количества ЛА, а в предельном случае — всего располагаемого парка заданного типа.
Полная система оценок уровня безопасности, охватывающая вероятности возникновения всех четырех категорий ОС может относиться к осредненному полету или к осредненному часу полета за заданный календарный интервал.
В первом случае вероятность возникновения КС оценивается как
2. 
вероятность возникновения АС
3. 
вероятность возникновения СС
4. 
вероятность возникновения ОС типа УУП
5. 
6.
7.
Здесь N*п — полное количество полетов, выполненных за рассматриваемый интервал времени выбранным количеством (парком) ЛА;
N*КС — количество полетов, в которых возникли ОС, завершившиеся катастрофическим исходом;
N*АС — количество полетов, в которых возникшие ОС завершились АС;
N*СС; N*УПП — количество полетов, в которых возникшие ОС могли быть классифицированы, соответственно, как СС и УУП.
Символы: «˄» — указывает на приближенный характер оценок;
«*» — указывает на то, что количество полетов определено на ограниченном интервале;
«N» — вероятность — определяется для осредненного 1 полета
Если обозначить количество полетов, в которые не возникали ОС через N*бп (безопасные полеты), то, очевидно, должно соблюдаться условие:


Оценка вероятности возникновения той или иной ОС в течение осредненного часа полета вычисляется путем замены в формулах (1.1) — (1*4) знаменателя на величину Гн — суммарное время полетов, выполненных в течение выбранного календарного периода.
Так, вероятность возникновения КС в течение осредненного часа полета оценивается как

а вероятность возникновения АС
Здесь индекс «Г» указывает на то, что вероятность определяется для осредненного часа полета.
По ряду причин критерии типа (1.1) — (1.4) (вероятность возникновения той или иной ОС в осредненном полете) предпочтительней критериев типа (1.7) —(1.8) (вероятность возникновения ОС в течение осредненного часа полета). Во-первых, размерность критериев (1.1) — 11.4) строго соответствует классическому определению вероятности, тогда как размерность критериев типа (1.7) — (1.8) выражается как «полет»; такая размерность больше подходит плотности вероятности, т. е. вероятности события, отнесенной к единице времени.
Во-вторых, что более важно, время полета с позиций безопасности не однородно и не равноценно. Существуют этапы полета, притом весьма скоротечные, для которых характерны высокая вероятность летных происшествий, и наоборот, ряд этапов являются малонапряженными. Использование критериев типа (1.7) — (1.8) нивелирует эти различия, что может исказить физическую картину явления и привести даже к ошибочным выводам.
10. Понятие адекватности АТ. Информационная, динамическая и эргономическая адекватность.
Применительно к задачам и методам имитационного моделирования наиболее подходящим понятием, оценивающим сходство исходного и имитируемого объекта, следует считать адекватность [19]. Этот термин означает воспроизведение в имитируемом объекте результирующих функций, а также внешних и внутренних связей, соответствующих исходному объекту с такой точностью, которая достаточна для решения «оставленных задач в необходимом объеме, при этом отличие результата от требуемого должно лежать в поле назначенного допуска.
Если применить все вышеизложенные положения к задачам обучения экипажей ЛА на наземных имитационных средствах, то ясно, что тренажер в целом может считаться адекватным соответствующему ЛА, если приобретенные с его помощью навыки и умения пилотирования эквивалентны получаемым в реальном полете. Таким образом, условия эквивалентности навыков (умений) должны быть положены в основу формирования требований к адекватности на высшем комплексном уровне.
Можно выделить следующие основные компоненты общей адекватности тренажера (рис. 4.2):
адекватность целей и условий;
адекватность интерьера (рабочих мест членов экипажа); адекватность информационных потоков; динамическую адекватность; эргономическую адекватность; психологическую адекватность.




11. Летная годность и эргономическое обеспечение безопасности полета.







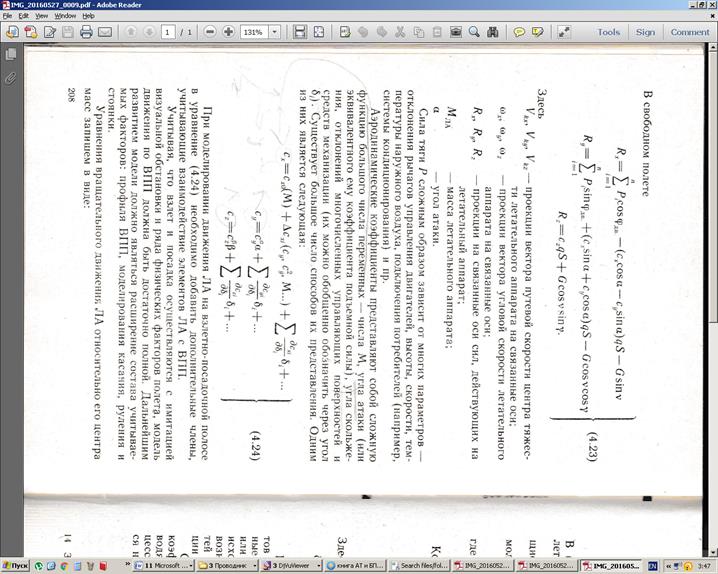
12. Основные имитаторы ЛА, имитатор динамики полета.








Основная литература.
МИИ
1. Кофман А. Введение в теорию нечетких множеств. – М.: Радио и связь, 1982, - 432с.
2. Змитрович А.И. Интеллектуальные информационные системы. – Мн.: НТООО «ТетраСистемс», 1997.- 361 с.
ИОС
1. Интеллектуальные обучающие системы: учеб. пособие/А.А. Бессонов, В.Я. Мамаев,
П.П. Парамонов. – СПб.: ГУАП, 2016. – 172 с.
АТ
1. Меерович Г.Ш., Годунов А.И., Ермолов О.К. Авиационные тренажеры и безопасность полетов. – Под ред. Мееровича Г.Ш. – Воздушный транспорт, 1990. – с. 343.
2. Учебник механика военно-воздушных сил. Авиационные тренажеры. М.





