

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Топ:
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Цель работы: экспериментальное определение временных характеристик типовых динамических звеньев.
Краткие теоретические сведения
Переходная характеристика звена представляет собой график изменения во времени выходной величины звена, вызванного подачей на его вход единичного ступенчатого воздействия.
Единичное ступенчатое воздействие – это воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным. Аналитическое выражение для переходной характеристики – переходная функция – обозначается h(t). Аналитическое выражение единичного ступенчатого воздействия – единичная ступенчатая функция – обозначается 1(t) и может быть описана следующим равенством:
Таким образом, h(t) – это выражение для у(t) при х(t) = 1 (t).
Импульсная характеристика представляет собой реакцию звена на единичный импульс. Единичный импульс — это математическая идеализация предельно короткого импульсного сигнала. Единичный импульс — это импульс, площадь которого равна единице при длительности, равной нулю, и высоте, равной бесконечности. На рис. 1.1-б, он условно показан в виде утолщения на оси ординат.
Рис.1.1. Единичное ступенчатое (а) и импульсное (б) входные воздействия
Аналитическое выражение для импульсной переходной характеристики — импульсная переходная функция, или весовая функция (функция веса), — обозначается w(t). Выражение для единичного импульса соответственно называется единичной импульсной функцией или дельта-функцией и обозначается δ(t). Таким образом, w(t) — это у(t) при х(t) = δ(t).
Математически дельта-функцию можно записать так:
Единичная и дельта-функция связаны следующим выражением:
|
|

Аналогично выглядит и связь между временной переходной функцией и функцией веса:
 или
или 
Воздействия, описываемые ступенчатой или импульсной переходными функциями, представляют собой распространенные виды входных воздействия в автоматических системах. К ступенчатому виду сводятся мгновенное изменение нагрузки электрического генератора, мгновенное возрастание нагрузки на валу двигателя, срабатывание реле и т.д. К импульсному виду можно отнести: кратковременный удар нагрузки на валу двигателя, кратковременный ток короткого замыкания генератора, отключаемый плавкими предохранителями и т.д.
Порядок выполнения работы
Задание: получить временные характеристики следующих типовых динамических звеньев:
1) Безинерционное (усилительное) 
2) Устойчивое апериодическое 
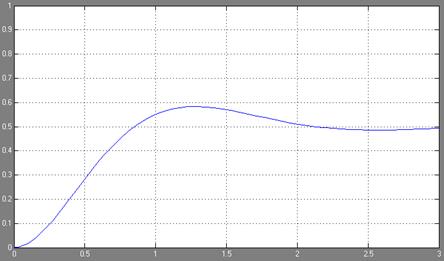
3) Устойчивое колебательное x<1 
4) Реальное дифференцирующее 
5) Реальное интегрирующее 
6) Изодромное 
Таблица 1.1
| Номер варианта | Постоянная времени Т 1, с | Постоянная времени Т 2, с | k |
| 1. | 0,1 | 0,01 | |
| 2. | 0,2 | 0,01 | 1,5 |
| 3. | 0,3 | 0,01 | |
| 4. | 0,4 | 0,02 | 2,5 |
| 5. | 0,5 | 0,02 | |
| 6. | 0,6 | 0,02 | 3,5 |
| 7. | 0,7 | 0,04 | |
| 8. | 0,8 | 0,04 | 4,5 |
| 9. | 0,9 | 0,04 | |
| 10. | 1,0 | 0,08 | 5,5 |
| 11. | 0,1 | 0,08 | 1,1 |
| 12. | 0,2 | 0,08 | 1,2 |
| 13. | 0,3 | 0,08 | 2,1 |
| 14. | 0,4 | 0,01 | 2,2 |
| 15. | 0,5 | 0,01 | |
| 16. | 0,6 | 0,01 | 1,5 |
| 17. | 0,7 | 0,02 | |
| 18. | 0,8 | 0,02 | 2,5 |
| 19. | 0,9 | 0,02 | |
| 20. | 1,0 | 0,04 | 3,5 |
| 21. | 0,1 | 0,04 | |
| 22. | 0,2 | 0,04 | 4,5 |
| 23. | 0,3 | 0,08 | |
| 24. | 0,4 | 0,08 | 5,5 |
| 25. | 0,5 | 0,08 | 1,1 |
| 26. | 0,6 | 0,08 | 1,2 |
| 27. | 0,7 | 0,06 | 2,1 |
| 28. | 0,8 | 0,06 | 2,2 |
| 29. | 0,9 | 0,06 | 3,2 |
| 30. | 1,0 | 0,06 | 4,2 |
| 31. | 0,3 | 0,02 | 5,2 |
| 32. | 0,4 | 0,04 | 6,2 |
| 33. | 0,5 | 0,04 | 5,4 |
| 34. | 0,6 | 0,04 | 4,4 |
| 35. | 0,7 | 0,08 | 11,2 |
Примечание: В передаточные функции звеньев, где содержится одна постоянная времени, подставляется Т 1. Постоянная времени Т 2 применяется для моделирования устойчивого колебательного звена, при этом Т 2 = Т 1 × Т 2, а Т = Т 1 + Т 2.
Ход работы
1. Выбрать на рабочем столе иконку «MatLab 6.5»
2. В верхнем меню File → New → Model.
3. В появившемся окне в строке «Инструменты» выбрать значок Library Browser – библиотека Simulink (четвертый значок справа).
|
|
4. Создать путем перетаскивания блоков схему моделирования временных характеристик в следующем порядке. В разделе блоков типа Continuous выбрать необходимые звенья для проведения лабораторной работы, например TransferFcn. На вход исследуемого блока подать сигнал – единичное ступенчатое воздействие (блок Constant в разделе Sources). Для этого присоединить блок задания константы с параметром «1». Выход исследуемого блока подключить к устройству отображения сигнала, в качестве которого можно выбрать осциллограф – Scope в разделе Sinks.
Блоки можно искать и через встроенную поисковую систему, набрав в поле Find несколько символов и нажав клавишу Enter. Если нужное звено найдено, то перетаскиваем его на монтажное поле, если нет - продолжаем поиск через клавишу Enter.
5. Снять временные характеристики первого звена и определить его временные характеристики после двукратного нажатия на блок Scope. Все остальные схемы можно получить путем клонирования звеньев. В полученных звеньях изменить передаточную функцию в соответствии с заданием. В окне Scope выбрать второй справа значок Parametrs, затемв окне Number of axes установить количество каналов осциллографа равное 3. Правой кнопкой мыши щелкнуть по экрану осциллографа и выбрать пункт Axes properties (свойства каналов). Затем установить Y-min 0 т.к. отрицательных значений на экране не будет, а положительное значение установить процентов на 30÷50 больше максимального на осциллограмме. И так для всех каналов.
Затем организовать связи с блоком Constant и осциллографом. Снять временные характеристики для каждого звена. Установить, согласно заданию, параметры исследуемых звеньев. Запустить моделирование процессов в схеме. Полученные графики отобразить в отчете. Проделать эти действия для всех пунктов задания. Во время работы с пакетом MatLab и библиотекой Simulink на рабочем поле модели выбранные блоки можно клонировать при удержании клавиши Ctrl. Запуск процесса моделирования производится с помощью кнопки ► на панели инструментов.
6. Для всех случаев определить время переходного процесса и установившееся значение. Для переходных процессов, имеющих колебательный характер рассчитать коэффициент затухания сигнала  .
.
7. Сравнить полученные экспериментальные характеристики между собой и с приведенными в литературе. Сделать вывод об изменении переходных характеристик звена, при изменении параметров звена.
|
|
Содержание отчета
1. Задание.
2. Схемы моделирования для каждого звена.
3. Графики экспериментально полученных временных характеристик с указанием времени переходного процесса и установившегося значения.
4. Выводы.
5. При защите отчета необходимо владеть знаниями, умениями и навыками по теме защищаемой работы и по возможностям работы с пакетом MatLab – Simulink в объеме выполняемой работы.
Контрольные вопросы
1. Что представляет собой воздействие, описываемое ступенчатой или импульсной функциями? Приведите пример устройств со ступенчатым характером нагрузки.
2. Что называют переходной функцией?
3. Какой вид будет иметь переходная функция исследуемых звеньев?
4. Что определяет постоянная времени T переходной функции?
5. Какое влияние оказывает коэффициент затухания на характер переходной функции?
6. Что называют передаточной функцией?
7.  Определить наиболее подходящий тип звена, которым можно промоделировать объект и обосновать сделанный выбор. Определить параметры модели. Записать выражения для переходной и передаточной функций модели.
Определить наиболее подходящий тип звена, которым можно промоделировать объект и обосновать сделанный выбор. Определить параметры модели. Записать выражения для переходной и передаточной функций модели.
Лабораторная работа 5
|
|
|

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!