

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Интересное:
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В.Г. Шуваев
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД
Рекомендовано
редакционно-издательским советом университета
в качестве учебного пособия
Кострома, 2005
УДК 621-315.
Шуваев В.Г. Автоматизированный электропривод:
Учебное пособие. Кострома: Издательство КГТУ, 2005. - 58с.
Учебное пособие содержит краткое изложение основных разделов курса «Автоматизированный электропривод». Оно соответствует программе курса для студентов заочного факультета специальности 220301 «Автоматизация технологических процессов и производств».
Рецензенты: кафедра электропривода и электротехнологий КГСХА;
профессор КГСХА А.С.Симоненко
© Костромской государственный технологический университет, 2005
Оглавление
Введение..………………………………………....…...........................…...4 1. Автоматическое управление электроприводом. Общие положения.....….……5  1.1. Классификация систем автоматического управления электроприводами…..5 1.2. Элементы систем автоматического управления электроприводами………..6 1.3. Системы автоматического управления регулируемого электропривода……6 1.4. Анализ и синтез систем автоматического управления электроприводами….7 1.5. Параметры и постоянные времени элементов электропривода………...…....8 1.5.1. Электромагнитные процессы…………………………….……….………...9 1.5.2. Электромеханические процессы...…………………….………....……..11 1.6. Структурные схемы и передаточные функции элементов электропривода.13 1.7. Скорость двигателя и ее влияние на динамические свойства
1.1. Классификация систем автоматического управления электроприводами…..5 1.2. Элементы систем автоматического управления электроприводами………..6 1.3. Системы автоматического управления регулируемого электропривода……6 1.4. Анализ и синтез систем автоматического управления электроприводами….7 1.5. Параметры и постоянные времени элементов электропривода………...…....8 1.5.1. Электромагнитные процессы…………………………….……….………...9 1.5.2. Электромеханические процессы...…………………….………....……..11 1.6. Структурные схемы и передаточные функции элементов электропривода.13 1.7. Скорость двигателя и ее влияние на динамические свойства
электромашинного устройства…………………….…………………………..18 1.7.1. Время пуска и торможения……...……………..………………………….18 1.7.2. Угол поворота вала двигателя за время пуска и торможения…...…..….20 1.7.3. Выбор номинальной скорости двигателя…………..………...…….…..21 1.8. Переходные процессы..….....................…….........................................…........23 2. Замкнутые системы управления электроприводом постоянного тока…............24 2.1. Принципы управления скоростью и моментом в замкнутых системах
|
|
электропривода…………………………………………………………………24 2.2. Системы с суммирующим усилителем................…........….................….…...26 2.2.1. Статический расчёт электропривода…….....…………………………….30 2.2.2. Комбинированные обратные связи..…..……...…………………………..33 2.2.3. Ограничение тока и момента электропривода..….……………..………. 34 2.2.4. Сравнение основных обратных связей………...……..…………………..37 2.3. Системы с подчиненным регулированием координат..........….…...…..........37 2.3.1 Особенности выбора регуляторов в системе с подчиненным
регулированием координат...……………………………………………38 2.3.2. Выбор постоянных времени регулятора…………………......…………...40 2.3.3. Синтез систем подчиненного регулирования…...……………….……...42 2.3.4. Устройства ограничения токов в переходных режимах…...……….....47 3. Замкнутые системы управления электроприводом переменного тока.………50 3.1. Приводы с тиристорным регулятором напряжения….……………..……….50 3.2. Приводы с частотным управлением……………..………..…….………...…..52 4. Комплектные электроприводы...........………………………………............….....54
Библиографический список.…….………….........…....………………….…..............58
Введение
При изучении курса «Автоматизированный электропривод» студентами заочного факультета возникает ряд сложностей, обусловленных отсутствием необходимой литературы в библиотеках города и на предприятиях и недостаточным комплектом соответствующей учебной и справочной литературы в библиотеке университета. Поэтому появилась необходимость в написании конспекта лекций по курсу «Автоматизированный электропривод». Данное учебное пособие, по сути, является комментарием к программе курса, изданной ранее для студентов заочного факультета по специальности 2102.
|
|
Учебное пособие снабжено перечнем литературы, которая позволяет дополнить его до необходимого по программе объёма.
В пособии освещены основные моменты и особенности изучаемой дисциплины.
Автоматическое управление электроприводом. Общие положения.
Рис.2.10. Электромеханическая характеристика привода с отсечкой
по току и скорости
Функциональная схема системы ЭП с отрицательными ОС по току и скорости с отсечками представлена на рис. 2.11. Отсечку по току осуществляет стабилитрон V1, т.к. уровень стабилизации тока (момента) может быть выбран однозначно, исходя из его допустимого или требуемого значения. Отсечку по скорости обеспечивает диод V2, когда опорное напряжение (по скорости) меньше напряжения датчика обратной связи ( ).
).
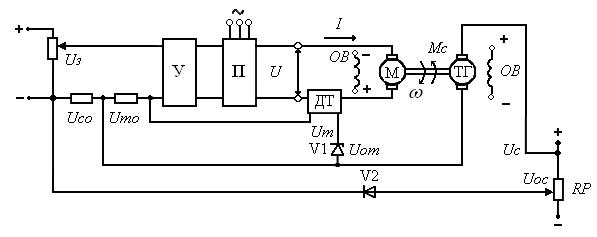
Рис.2.11. Схема замкнутой системы УП – Д с обратными связями по скорости и току с отсечками
Регулирование скорости в такой системе ЭП изменением задающего напряжения Uз невозможно, т.к. при уменьшении скорости ниже скорости отсечки ( ) ОС по скорости отключается. Скорость регулируется одновременно с изменением опорного напряжения (
) ОС по скорости отключается. Скорость регулируется одновременно с изменением опорного напряжения ( ).
).
Рис.2.19. Преобразованная структурная схема системы регулирования
с астатизмом второго порядка
При этом:  ,
,  ,
,  .
.
Обычно системы подчиненного регулирования имеют не более трех контуров. Так в следящих системах внешний контур – контур регулирования угла поворота, средний контур – контур скорости, а внутренний – контур тока.
Задатчик интенсивности
При резком изменении задания в системе происходит форсировка сигнала управления и, как следствие, скачки тока и момента. Для того чтобы избежать этих неприятных явлений, используют задатчики интенсивности (рис. 2.20).
Их цель - обеспечить плавное изменение сигнала, без скачков, при любом изменении сигнала на входе. Обычно такие задатчики имеют линейную характеристику (рис.2.20).
В данном случае (рис.2.20,а) ток заряда или разряда конденсатора  включенного в цепь коллектор-база транзистора
включенного в цепь коллектор-база транзистора  остается постоянным в широких пределах действующего на входе напряжения
остается постоянным в широких пределах действующего на входе напряжения  . Напряжение же на выходе меняется линейно со временем:
. Напряжение же на выходе меняется линейно со временем:  . Темп нарастания напряжения на выходе определяется регулируемым резистором
. Темп нарастания напряжения на выходе определяется регулируемым резистором  в цепи эмиттера.
в цепи эмиттера.
|
|
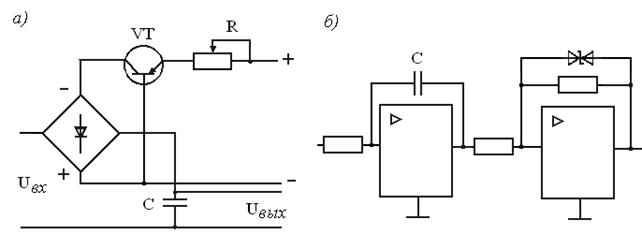
Рис.2.20. Схемы задатчика интенсивности
Для обеспечения неизменной полярности на коллекторе транзистора введены диоды, включенные по мостовой схеме. В таком задатчике интенсивности входной сигнал может меняться произвольно, а выходной меняется только линейно. При этом входной сигнал определяет лишь установившееся значение выходного.
В системе подчиненного регулирования для реализации такого задатчика обычно используют два операционных усилителя, один из которых работает как интегратор, а другой как последовательный ограничитель (рис. 2.20,б).
Комплектные электроприводы
Прогрессивным явлением при создании средств управления и автоматизации технологических процессов является разработка и выпуск комплектных ЭП (КЭП) постоянного и переменного тока. КЭП представляют собой регулируемый ЭП, в состав которого входят функциональные элементы, согласованные по всем техническим и конструктивным характеристикам и параметрам [3, 9, 11, 13].
Распространение КЭП определяется более низкой трудоемкостью при его разработке и изготовлении, сокращении времени на электромонтажные и наладочные работы, удобством эксплуатации.
КЭП различают по следующим техническим признакам:
- напряжению питающей сети;
- числу двигателей (одно-, двух- или многодвигательные);
- виду преобразователя;
- наличию реверса;
- виду основной регулируемой координаты;
- диапазону регулирования скорости;
- составу аппаратуры силовой цепи;
- наличию торможения;
- способу связи с питающей сетью.
Библиографический список
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.
2. Сабинин Ю.А. Электромашинные устройства автоматики. - Л.: Энергоиздат, 1988.
3. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. - М.: Высш. шк., 1986.
4. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева, А.В. Шинянского. - М.: Энергоиздат, 1983.
5. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода. - М.: Энергоиздат, 1992.
6. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат, 1985.
|
|
7. Башарин А.В. и др. Управление электроприводами. - Л.: Энергоиздат, 1982.
8. Ланген А.М., Красник В.В. Электрооборудование предприятий текстильной промышленности. - М.: Легпромиздат, 1991.
9. Москаленко В.В. Электрический привод. - М.: Высш. шк., 1991.
10. Васин В.М. Электрический привод. - М.: Высш. шк., 1984.
11. Арменский Е.В. и др. Автоматизированный электропривод. - М.: Высш. шк., 1987.
12. Кацман М. М. Электрические машины и электропривод автоматических устройств. - М.: Высш. шк., 1987.
13. Михеев Ю.А., Морозов Э.В. Электрический привод. - М.: Агропромиздат, 1988.
14. Цейтлин Л.С. Электропривод, электрооборудование и основы
управления. - М.: Высш. шк., 1985.
В.Г. Шуваев
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД
Рекомендовано
редакционно-издательским советом университета
в качестве учебного пособия
Кострома, 2005
УДК 621-315.
Шуваев В.Г. Автоматизированный электропривод:
Учебное пособие. Кострома: Издательство КГТУ, 2005. - 58с.
Учебное пособие содержит краткое изложение основных разделов курса «Автоматизированный электропривод». Оно соответствует программе курса для студентов заочного факультета специальности 220301 «Автоматизация технологических процессов и производств».
Рецензенты: кафедра электропривода и электротехнологий КГСХА;
профессор КГСХА А.С.Симоненко
© Костромской государственный технологический университет, 2005
Оглавление
Введение..………………………………………....…...........................…...4 1. Автоматическое управление электроприводом. Общие положения.....….……5 1.1. Классификация систем автоматического управления электроприводами…..5 1.2. Элементы систем автоматического управления электроприводами………..6 1.3. Системы автоматического управления регулируемого электропривода……6 1.4. Анализ и синтез систем автоматического управления электроприводами….7 1.5. Параметры и постоянные времени элементов электропривода………...…....8 1.5.1. Электромагнитные процессы…………………………….……….………...9 1.5.2. Электромеханические процессы...…………………….………....……..11 1.6. Структурные схемы и передаточные функции элементов электропривода.13 1.7. Скорость двигателя и ее влияние на динамические свойства
электромашинного устройства…………………….…………………………..18 1.7.1. Время пуска и торможения……...……………..………………………….18 1.7.2. Угол поворота вала двигателя за время пуска и торможения…...…..….20 1.7.3. Выбор номинальной скорости двигателя…………..………...…….…..21 1.8. Переходные процессы..….....................…….........................................…........23 2. Замкнутые системы управления электроприводом постоянного тока…............24 2.1. Принципы управления скоростью и моментом в замкнутых системах
|
|
электропривода…………………………………………………………………24 2.2. Системы с суммирующим усилителем................…........….................….…...26 2.2.1. Статический расчёт электропривода…….....…………………………….30 2.2.2. Комбинированные обратные связи..…..……...…………………………..33 2.2.3. Ограничение тока и момента электропривода..….……………..………. 34 2.2.4. Сравнение основных обратных связей………...……..…………………..37 2.3. Системы с подчиненным регулированием координат..........….…...…..........37 2.3.1 Особенности выбора регуляторов в системе с подчиненным
регулированием координат...……………………………………………38 2.3.2. Выбор постоянных времени регулятора…………………......…………...40 2.3.3. Синтез систем подчиненного регулирования…...……………….……...42 2.3.4. Устройства ограничения токов в переходных режимах…...……….....47 3. Замкнутые системы управления электроприводом переменного тока.………50 3.1. Приводы с тиристорным регулятором напряжения….……………..……….50 3.2. Приводы с частотным управлением……………..………..…….………...…..52 4. Комплектные электроприводы...........………………………………............….....54
Библиографический список.…….………….........…....………………….…..............58
Введение
При изучении курса «Автоматизированный электропривод» студентами заочного факультета возникает ряд сложностей, обусловленных отсутствием необходимой литературы в библиотеках города и на предприятиях и недостаточным комплектом соответствующей учебной и справочной литературы в библиотеке университета. Поэтому появилась необходимость в написании конспекта лекций по курсу «Автоматизированный электропривод». Данное учебное пособие, по сути, является комментарием к программе курса, изданной ранее для студентов заочного факультета по специальности 2102.
Учебное пособие снабжено перечнем литературы, которая позволяет дополнить его до необходимого по программе объёма.
В пособии освещены основные моменты и особенности изучаемой дисциплины.
Автоматическое управление электроприводом. Общие положения.
Классификация систем автоматического управления электроприводами
В этом курсе мы рассмотрим некоторые особенности построения замкнутых систем управления (СУ) электропривода (ЭП) [1, 4, 5, 7, 9, 11].
Автоматическое управление сводится к выполнению системой управления заданного исполнительному органу рабочей машины (ИО РМ) режима работы без непосредственного участия оператора. СУ ЭП представляет собой автоматизированный ЭП с управляемым преобразовательным устройством, обеспечивающим управление движением ИО в переходных и установившихся режимах в соответствии с заданным алгоритмом.
Системы управления ЭП можно разделить на (рис.1.1):
1. Релейные, осуществляющие управление процессами пуска, реверсирования и торможения двигателей постоянного и переменного тока при питании их от сети с неизменным напряжением.
 |
Рис.1.1. Классификация СУ ЭП
2. Регулируемые, осуществляющие стабилизацию скорости и момента с заданной точностью в установившихся и переходных режимах при действии возмущений.
3. Следящие, представляющие замкнутые динамические СУ, отрабатывающие произвольный закон задания положения с допустимой погрешностью. К этому же классу относятся позиционные ЭП, являющиеся частным случаем следящих систем. В них отрабатывается постоянное заданное положение с заданной погрешностью.
4. Программные, обеспечивающие управление индивидуальным или групповым ЭП по заданной программе.
5. Адаптивные, осуществляющие управление с учетом заранее неизвестных изменений параметров ЭП при изменении внешних возмущающих воздействий.
При проектировании СУ к ним предъявляют следующие требования:
1. Простота, гибкость и удобство управления;
2. Высокая надежность;
3. Наличие защиты, сигнализации и индикации, возможность диагностики неисправностей;
4. Удобство монтажа, эксплуатации и ремонта;
5. Минимальные массогабаритные показатели;
6. Соответствие нормам охраны труда, включающим безопасность обслуживания и противопожарные мероприятия;
7. Высокая экономичность.
С учетом этих показателей разрабатывается техническое задание на проектирование электропривода. Оно включает в себя:
1. Технологические режимы работы органа управления (ОУ), определяющие режим работы и мощность электродвигателя (ЭД), преобразователя и других элементов СУ;
2. Род тока и напряжения питания ЭП;
3. Тип ЭД, преобразователя и СУ;
4. Статические (диапазон регулирования, жесткость механической характеристики и др.) и динамические (характер переходного процесса, быстродействие, перерегулирование и др.) показатели автоматического регулирования скорости при заданных возмущениях;
5. Энергетические показатели ( и др.);
и др.);
6. Климатические условия работы;
7. Экологические требования.
1.2. Элементы систем автоматического управления электроприводами [1, 9]
Элементы, из которых состоит электропривод, разнообразны. К ним в первую очередь относятся:
электрические машины, трансформаторы, преобразователи (чаще всего полупроводниковые), усилители (электронные, электромашинные, магнитные и др.), датчики, тахогенераторы, электрические аппараты, бесконтактные логические элементы, элементы универсальной блочной системы регулирования (УБСР), комплекс технических микропроцессорных средств микроДАТ и др.
1.3. Системы автоматического управления регулируемого электропривода [9]
Эти системы (САУ РЭП) обеспечивают стабилизацию скорости и момента ЭД с заданной точностью. Они представляют замкнутые СУ с питанием ЭД от управляемых преобразователей напряжения и частоты. Такие системы называются еще системами «управляемый преобразователь – двигатель» (УП-Д). Они обеспечивают стабилизацию скорости как основной регулируемой координаты, так и вспомогательных координат, при этом ошибка стабилизации достигает  . Стабилизация момента обычно используется для ограничения тока в динамическом и статическом режимах.
. Стабилизация момента обычно используется для ограничения тока в динамическом и статическом режимах.
Системы стабилизации скорости и момента подразделяются:
- по роду тока или типу двигателя и преобразователя на системы ЭП постоянного тока и системы ЭП переменного тока;
- по принципу действия на непрерывные (аналоговые) и дискретные (цифровые);
- по принципу регулирования на статические и астатические;
- по структуре на системы с суммирующим усилителем и с подчиненным регулированием координат.
В качестве УП для электродвигателя ЭП используются обычно вентильные преобразователи на тиристорах или транзисторах. Наибольшее распространение получили тиристорные ЭП, в которых используются тиристорные реверсивные или нереверсивные преобразователи. Такие преобразователи применяются как для питания обмоток якоря, так и для питания обмоток возбуждения в приводах большой мощности. В ЭП переменного тока применяются частотные преобразователи и регуляторы напряжения.
|
|
|

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!