Судовые навигационные радиолокационные станции
Пособие содержит описание состава комплекта, эксплуатационно-технических характеристик, устройства, функциональных схем, правил эксплуатации судовых навигационных радиолокационных станций типа Донец-2, Миус, Печера-1, Наяда-5, эксплуатируемых на судах морского и речного флота.
Цель пособия – формирование у будущих судоводителей практических навыков по работе с судовыми радиолокационными станциями.
Пособие предназначено для курсантов судоводительского факультета Киевской государственной академии водного транспорта.
ВВЕДЕНИЕ
Судовые навигационные РЛС используются в судовождении для обнаружения, определения координат и параметров движения различных надводных и береговых объектов, береговой линии и других препятствий, способных отражать энергию зондирующих сигналов в сторону РЛС. Решение этих задач позволяет обеспечить безопасность мореплавания при нахождении судов в узкостях и других стесненных условиях плавания; безопасное расхождение судов при пониженной или ограниченной видимости; определение места судна по известным береговым или плавучим ориентирам и с помощью специально устанавливаемых РМО.
В судовых навигационных РЛС почти исключительно используется импульсный метод радиолокации, который позволяет обнаруживать и наблюдать на экране радиолокатора одновременно большое количество целей, т. е. контролировать всю окружающую обстановку в радиусе действия станции.
Такая РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутке принимает отраженные от объектов импульсные сигналы, запаздывающие на время:
t = 2D/с,
где D – расстояние до объекта,
с – скорость распространения радиоволн.
По этому интервалу времени определяется расстояние или дальность:
D = ct/2,
а с помощью остронаправленной антенны – направление (азимут) на обнаруженный объект. При наличии в зоне действия РЛС нескольких целей принимаемые отраженные сигналы будут смещены во времени и по азимуту в соответствии с дальностями до этих объектов и направлениями на них.
К преимуществам импульсного метода относится сравнительная простота использования одной антенны как для передачи, так и для приема импульсных сигналов.
Недостатками импульсных навигационных РЛС являются необходимость применения больших пиковых мощностей зондирующих импульсов, сложность определения скорости движения объектов, невозможность измерения очень малых расстояний, относительно большая минимальная дальность действия РЛС, зависящая от длительности импульсов, минимальное значение которых ограничивается шириной частотного спектра и временем протекания переходных процессов в аппаратуре.
Импульсные судовые навигационные РЛС должны обладать достаточной разрешающей способностью, точностью измерения расстояний и направлений на обнаруживаемые объекты, минимальными габаритными размерами и массой, обеспечивая при этом:
– круговой обзор по азимуту, дающий возможность контролировать окружающую надводную обстановку в заданном радиусе действия;
– ориентацию изображения отраженных сигналов от объектов на экране индикаторе как относительно курса судна (диаметральной плоскости), так и относительно меридиана;
– надежное обнаружение как больших, так и малых низкорасположенных надводных объектов (буи, шлюпки, различные препятствия) при наличии помех от взволнованной морской поверхности и от погодных условий (дождь, снег, туман и пр.);
– дальность обнаружения объектов независимо от амплитуды качки судна;
– воспроизведение на экране индикатора как относительного, так и истинного движения объектов;
– надежность работы и простоту обслуживания.
Все вышеизложенное относится к судовым навигационным РЛС «Донец-2», «Миус», «Печера-1», «Наяда-5».
РЛС «Донец-2», «Миус», «Печера-1», «Наяда-5» работают импульсным методом, имеют индикатор кругового обзора (ИКО), снабженный электронно-лучевой трубкой с радиально-круговой разверткой луча. В комплект этих РЛС, как правило, входят такие приборы и блоки как:
– антенно-волноводное устройство (прибор А);
– приемо-передающее устройство (прибор П);
– индикаторное устройство (прибор И);
– источники питания.
С 1960 г. на морских и речных судах начали устанавливать РЛС «Донец», которая быстро завоевала популярность у судоводителей. При небольших габаритах и высокой экономичности РЛС «Донец» позволяла эффективно решать разнообразные навигационные задачи. Но в процессе освоения и эксплуатации были выявлены некоторые дополнительные технические требования, которые легли в основу ее модернизации. Полному усовершенствованию подвергались антенное и передающее устройства. Остальные приборы были также существенно переделаны. РЛС «Донец» и модернизированная несколько позднее РЛС «Донец-2» сыграли большую роль в повышении безопасности мореплавания и практическом использовании радиолокации в судовождении. Вместе с тем РЛС «Донец-2» имеет целый ряд существенных недостатков. К ним в первую очередь относятся:
- невозможность отображения надводной обстановки на экране ИКО в режиме истинного движения;
- отсутствие электронного визира направлений с цифровым счетчиком;
- невозможность оперативного смещения на 2/3 радиуса экрана центра радиально-круговой развертки как в режиме истинного движения, так и в режиме относительного движения, что не позволяет увеличивать дальность радиолокационного обзора в выбранном направлении без изменения масштаба шкалы дальности;
- отсутствие подвижных кругов дальности;
- отсутствие возможности решения навигационных задач путем сопряжения с устройством оценки опасности сближения с надводными объектами;
- отсутствие специального обледенительного устройства в приводе вращения антенны;
- не большая мощность излучения, а значит и не большая дальность действия;
- применение устаревшей элементной базы на основе электронных ламп.
Развитие вычислительной техники, развитие элементной базы, необходимость поддержания технического уровня судовых навигационных РЛС, отвечающих Международной конвенции по охране человеческой жизни на море, вызвали настоятельную необходимость создания следующего поколения РЛС. Создаются РЛС «Миус», РЛС «Печера», «Наяда»
РЛС «Наяда-5» по сравнению с предыдущей серией РЛС «Наяда» («Наяда-1», «Наяда-2», «Наяда-3». «Наяда-4») имеет бóльшую мощность излучения, увеличенные размеры экрана ЭЛТ и может сопрягаться с устройством оценки опасности сближения с надводными объектами.
Отличительными особенностями РЛС «Печера-1», «Наяда-5» являются:
- возможность отображения надводной обстановки на экране ИКО как в режиме относительного движения, так и в режиме истинного движения («Наяда-5»);
- возможность измерения угловых координат объектов как механическим, так и электронным визиром с цифровым счетчиком направлений;
- возможность оперативного смещения на 2/3 радиуса экрана центра радиально-круговой развертки как в режиме истинного движения, так и в режиме относительного движения, что позволяет увеличивать дальность радиолокационного обзора в выбранном направлении без изменения масштаба шкалы дальности;
- возможность решения навигационных задач путем сопряжения с устройством оценки опасности сближения с надводными объектами;
- наличие специального обледенительного устройства в приводе вращения антенны;
- более высокая разрешающая способность по дальности и направлению за счет укорочения длительности зондирующих импульсов, сужения ширины диаграммы направленности антенны в горизонтальной плоскости и использования в индикаторе ЭЛТ с повышенной разрешающей способностью;
- бóльшая мощность излучения, а значит и бóльшая дальность действия, увеличенные размеры экрана ЭЛТ,
- более современная элементная база.
Следующим этапом в развитии и совершенствовании судовых навигационных РЛС стало создание автоматизированных станций (систем), заложивших основу автоматизации процессов судовождения, имеющих в своем составе устройства, обеспечивающие автоматическое сопровождение объектов в режиме кругового обзора окружающего пространства, автоматическое решение задачи расхождения с сопровождаемым объектом (целью).
Современные радары в связи с достаточно бурными темпами развития радиоэлектронных систем навигации имеют значительные преимущества перед РЛС, которые представлены в данном учебном пособии. Это, прежде всего:
- значительно уменьшенные вес и габариты;
- наличие цветного изображения;
- простота в эксплуатации;
- применение современных технологий обработки сигналов;
- применение новых надежных приводов антенн и новых усовершенствованных антенн;
- наличие простой системы управления при помощи клавиш, валкодеров и меню;
- наличие встроенной системы ЕРА и возможности дополнительной установки ARPA;
- наличие традиционных для современных высокотехнологичных радаров целого ряда функций (двойные электронные курсоры азимута (EBL), дальности (VRM) и маркера удаления (EVRM), режим смещения, память для созданных оператором карт и др.;
- наличие автоматической системы управления настройкой приемника.
Следует отметить, что в настоящее время РЛС «Донец-2», «Миус», «Печера-1», «Наяда-5» промышленностью не выпускаются, но в тоже время продолжают находиться в эксплуатации на морских и речных судах. РЛС «Наяда-5» успешно применяется также и для управления движением судов в морских торговых портах.
В главах учебного пособия даются описания, правила эксплуатации, приводятся основные тактико-технические характеристики, назначение функциональных блоков и узлов по мере усовершенствования РЛС и их развития.
В главе I рассматривается импульсные судовые навигационные РЛС «Донец», «Донец-2».
Глава II содержит описание судовой РЛС «Миус».
Главы III и IV посвящены описанию усовершенствованным РЛС «Печера-1» и «Наяда-5».
Такое последовательное изложение учебного материала позволит приобрести не только практические навыки по эксплуатации однотипных РЛС, но и облегчит усвоение принципа действия и эксплуатации современных радаров.
СУДОВЫЕ НАВИГАЦИОННЫЕ
СОСТАВ КОМПЛЕКТА
Судовая РЛС «Донец» («Донец-2») состоит из следующих приборов:
- Прибор А – Антенное устройство
- Прибор П – Приёмопередатчик
- Прибор В – Прибор питания
- Агрегат питания с пускорегулировочной аппаратурой.
УСТРОЙСТВО И РАБОТА СТАНЦИИ
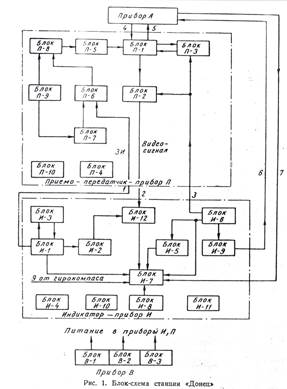
Блок-схема РЛС «Донец» представлена на рис.1.
Рассмотрим устройство и работу приборов станции.
Прибор А – Антенно-волноводное устройство предназначено для излучения в пространство зондирующих высокочастотных импульсов, приём части этих импульсов, отражённых от обнаруженных объектов, а также обеспечение синхронности и синфазности работы с прибором И, и получения отметки курса на приборе И. На рис.2 показана принципиальная схема антенно-волноводного тракта, а на рис.3 внешний вид прибора А.
Прибор А состоит из двух частей: неподвижной – привод для вращения антенны с элементами синхронной передачи и подвижной – параболического отражателя с рупорным излучателем. В корпусе привода расположены:
- Двигатель с червячным редуктором
- Основной вал, внутри которого находится вращающийся переход через который высокочастотная энергия передаётся излучателю.
- 2 кулачка, связанные с редуктором и предназначенные для замыкания и размыкания расположенных там же микровыключателей обеспечивающих синфазность вращения антенны с началом развёртки индикатора и получения отметки курса. (и то и другое осуществляется в момент пересечения максимумом излучения антенны диаметральной плоскости судна). Внутри корпуса около редуктора расположена, также, система подогрева, представляющая собой стеклованные сопротивления мощностью 400 Вт.
- Сельсин датчик связанный с редуктором предназначенный для синхронизации вращения антенны и отклоняющей системы которая обеспечивает получение развёртки на ЭЛТ прибора И.
Подвижная часть прибора А состоит из:
- Рупорного излучателя высокочастотной энергии, расположенного в фокусе параболического отражателя.
- Параболического отражателя, собирающего эту ВЧ энергию в узкий пучок и излучающего её в пространство в виде зондирующего импульса. Отражатель также воспринимает часть излученной энергии после её отражения от обнаруженных объектов.
- Вращающегося перехода, предназначенного для соединения вращающегося излучателя с неподвижным волноводным трактом.
Устройство и работу излучателя и отражателя поясним из рис.2.
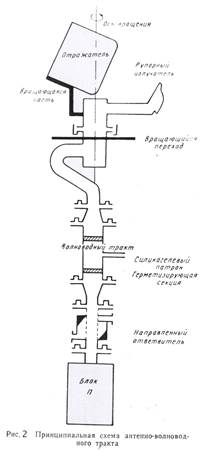
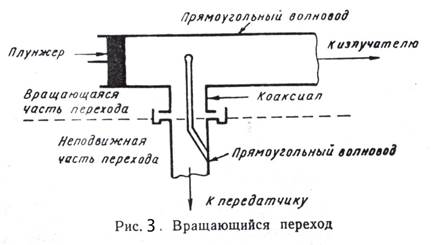
Вращающийся переход (см. рис.3), представляет собой прямоугольный волновод внутри которого размещается центральный проводник коаксиального волновода, выполненного в виде штыря с латунным шариком на конце. Коаксиальный волновод возбуждает ВЧ колебания во вращающейся части волновода. Эти ВЧ колебания питают излучатель.
Подвижная и неподвижная части волновода центрируется относительно друг друга, что обеспечивает передачу в излучатель почти всей энергии зондирующего импульса. Согласование подвижной и неподвижной частей вращающегося перехода осуществляется специальным поршнем-плунжером, расположенном в тыловой части вращающегося перехода.
В РЛС «Донец-2» применена рупорно-щелевая антенна вместо рупорного излучателя и параболического отражателя, устанавливаемых в РЛС «Донец».
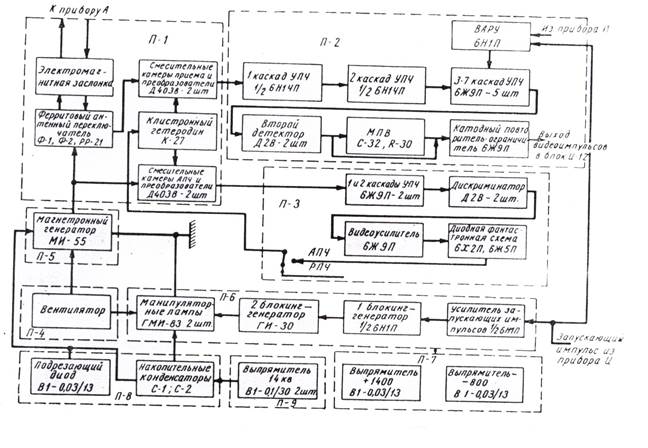 Рис.4 Блок-схема приёмопередатчика.
Рис.4 Блок-схема приёмопередатчика.
Приемопередатчик – (Прибор П) состоит из:
- Передатчика, предназначенного для формирования прямоугольных импульсов длительностью, в зависимости от шкал дальности, 0,11 или 0,5 мкс. Эти импульсы управляют работой модулятора, который, в свою очередь, формирует импульсы, управляющие работой магнетронного генератора. Узлы и блоки передатчика начинают работу от запускающего импульса, вырабатываемого в индикаторе.
- СВЧ магнетронного генератора, предназначенного для выработки мощного зондирующего импульса, который через ферритовый переключатель и защитные устройства, поступает в волноводный тракт. Ферритовый антенный переключатель осуществляет автоматическое переключение антенны с передачи на приём в промежутке, когда излучения зондирующего импульса не происходит. Защитное устройство предохраняет приёмник от мощного импульса вырабатываемого магнетроном и попадающих через антенну случайных импульсов других РЛС.
- Приёмного устройства, предназначенного для преобразования сигнала, отражённого от обнаруженных объектов в импульсы промежуточной частоты, (60 Мгц) усиления их и формирование на их основе видеоимпульсов, подаваемых в индикатор блоком П-2. В качестве генератора, для выработки импульсов промежуточной частоты используется отражательный клистрон типа К – 27. Поддержание промежуточной частоты в пределах 60 Мгц осуществляется узлом автоматической подстройки частоты (АПЧ), расположенном в блоке П – 3 с помощью этого же блока осуществляется также возможность ручной подстройки частоты (РПЧ). Одновременно с выработкой видеосигнала, блок П – 2 обеспечивает работу схем временной автоматической регулировки усиления (ВАРУ) позволяет уменьшить помехи вызываемые волнением моря) и дифференциальной цепочки малой постоянной времени (МПВ), регулируя которую, добиваются уменьшения помехи, от атмосферных факторов.
- Блок контроля (П - 10) – предназначен для контроля напряжений (+300 в стаб.; +150 в; -150 в стаб.; -300 в стаб.) и токов магнетрона и других узлов прибора П. Контроль осуществляется с помощью микроамперметра, подключаемого к нужной цепи специальным переключателем. Блок-схему прибора П см. на рис.4.
Индикатор (Прибор И) предназначен для воспроизведения радиолокационного изображения, обеспечения синхронной работы основных приборов станции и управления работой всей станции. Функциональная схема индикатора показана на рис.5
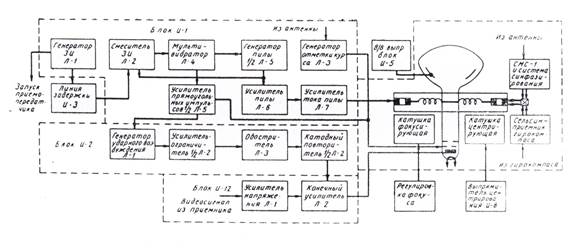
Рис.5 Функциональная схема.
Рассмотрим назначение и работу основных блоков прибора И.
В блоке И-1 вырабатываются запускающие импульсы с частотой следования в зависимости от шкалы дальности 1700 или 3400 имп/сек. Эти импульсы поступают: в прибор П для запуска модулятора и формирования зондирующих импульсов; для запуска схемы ВАРУ, а также, через линию задержки, для выработки прямоугольных импульсов развертки и подсветки экрана ЭЛТ. Там же вырабатываются импульсы для последующего формирования импульсов НКД, и импульсы отметки курса.
С этого же блока импульсы развёртки и подсветки подаются на вращающуюся отклоняющую катушку ЭЛТ, благодаря чему на экране высвечивается развёртка. Вырабатываемые в этом же блоке импульсы отметки курса дополнительно подсвечивают развёртку в момент прохождения максимума излучения антенны через линию ДП судна.
В блоке И – 2 вырабатываются синусоидальные колебания частота которых определяется выбранной шкалой дальности. После ряда преобразований, синусоидальные колебания подаются в блок И – 12 в виде импульсов неподвижных колец дальности.
В блоке И – 12 производится усиление видеосигнала, поступающего из прибора П: с последнего каскада усиления блока И – 12, видеосигнал, вместе с импульсами НКД, поступает на катод ЭЛТ.
Блок И – 7 (электронно-лучевая трубка) предназначен для воспроизведения на экране радиолокационного изображения, регулировки яркости и фокусировки этого изображения, совмещения центра изображения с геометрическим центром экрана и обеспечения синхронного и синфазного вращения развёртки с антенной.
В блок входят:
- ЭЛТ типа 23 ЛМ 34 – В
- Вращающаяся отключающая катушка
- Фокусирующая катушка.
- Катушка смещения центра развёртки.
- Синхронно следящая система и механический привод вращения отключающей катушки.
На горловине ЭЛТ последовательно расположены три катушки: отклоняющая, смещение центра и фокусирующая.
В отклоняющую катушку, из блока И – 1 подаётся пилообразное напряжение, которое создаёт магнитное поле, отклоняющее электронный луч от центра экрана к его краю. Туда же подаётся импульс подсвета. В момент прохождения антенной ДП судна, на модулирующий электрод ЭЛТ подаётся импульс отметки курса, в результате чего на экране засвечивается линия курса своего судна. Яркость линии развёртки регулируется переменным сопротивлением, находящимися на панели управления станции.
Синхронное и синфазное вращение отклоняющей катушки с антенной обеспечивается сельсинной передачей и специальной схемой синфазирования. Действие этой системы основаны на том, что механическое вращение вала антенны сельсином преобразуется в электрические токи, которые, в свою очередь, в индикаторном устройстве преобразуются в механическое вращение вала, связанного с отклоняющей катушкой. В системе вращения отклоняющей катушки установлен механический дифференциал, на который, при ориентации станции в режиме «НОРД» с помощью сельсина приёмника вводится значение курса, поступающего от гирокомпаса, и на экране ЭЛТ с помощью визира направления можно снять значение пеленга на наблюдаемый объект. Для получения пеленга, перед переходом ориентации на «НОРД», нужно вручную согласовать положение принимающего сельсина курса с показаниями репитера ГК.
На фокусирующую катушку подается постоянное напряжение +150 в, в цепи картушки установлено переменное сопротивление (оно выведено на панель управления), с помощью которого можно регулировать фокусировку электронного луча.
Катушка смещения центра состоит из 2-х взаимно перпендикулярных секций. Регулируя протекающие по ним токи можно несколько смещать центровку электронного луча. Секции катушки питаются от специального выпрямителя, расположенного в блоке И – 8 прибора И. На электроды ЭЛТ подаются напряжение и сигналы: На анод – 5,5 кв постоянного тока – от специального высоковольтного выпрямителя (блок И - 5). На модулятор – стабилизированное напряжение +300 в от прибора В, а также импульсы развёртки и подсветки, вырабатываемые в блоке И – 1, на катод – видеоимпульсы усиленные и смешанные с импульсами НКД в блоке И – 12.
Конструктивно, прибор И см. рис. установлен на вертикальном поворотном механизме, который, в свою очередь крепится к горизонтальному поворотному механизму. Такая установка индикатора позволяет поворачивать его в вертикальной плоскости на угол до 40°, а в горизонтальной плоскости – в пределах 360°, с фиксацией положения через 15°.
На стойке прибора И расположены: кнопки пуска и остановки агрегата питания; автомат защиты мотора антенны; тумблер включения и выключения гирокомпаса; выпрямитель питания мотора антенны.
ОРГАНЫ УПРАВЛЕНИЯ СТАНЦИЕЙ
Все органы управления станцией расположены на передней панели индикатора и на панели управления и контроля.
Экран электронно-лучевой трубки расположен в центре передней панели, на которую вынесены следующие органы управления:
- Ручка переключателя шкал дальности – «Мили»;
- Ручка регулировки усиления приёмника – «Усиления»;
- Ручка переменного сопротивления R-12, регулирующего длительность развертки на первой шкале, - «Масштаб - плавно»;
- Ручка переменного сопротивления R-7, регулирующего амплитуду импульсов НКД на входе видеоусилителя, - «НКД»;
- Ручка переменного сопротивления R-4, регулирующего амплитуду импульса отметки курса, - «Отметка курса»;
- Ручка переменного сопротивления R-27, регулируется длительность импульса ВАРУ, - «ВАРУ»;
- Ручка «Визир» узла И-4, с помощью которой производится поворот шкалы визира направления;
- Ручка ««Курс» - нажать – норд» - для переключения ориентации радиолокационного изображения.
На панели управления и контроля (блок И-6) установлены:
1. измерительный прибор ИП-1 с переключателем на 10 положений (с помощью прибора можно измерять напряжения 230 в, 427 гц; - 27 в; - 150 в стаб.; - 300 в стаб.; + 150 в; +250 в; +300 в стаб. и токи первого кристалла приёмника, второго кристалла АПЧ и магнетрона);
2. тумблер «Выкл. - подготовка», с помощью которого включается станция. При включении тумблера на прибор В подаётся переменное напряжение от агрегата;
3. тумблер «Выкл. - работа», с помощью которого включается передатчик станции;
4. тумблер «РПЧ - АПЧ» для перехода на ручную или автоматическую подстройку частоты;
5. тумблер «Выкл. - МПВ» для включения цепи малой постоянной времени приёмного тракта;
6. ручка «Яркость» переменного сопротивления R-9 для регулировки яркости радиолокационного изображения;
7. ручка переменного сопротивления R-11 «Фокус» для регулировки тока фокусирующей катушки и фокусировки изображения на экране индикатора;
8. тумблер «Выкл. - Обзор» для включения мотора вращения антенны;
9. неоновая лампочка НЛ-2 типа МН-3 «Агрегат», контролирующая наличие напряжения агрегата, питающего станцию;
10. неоновая лампочка НЛ-3 «Подготовка» типа МН-3, контролирующая подачу переменного напряжения на вход выпрямителя В;
11. неоновая лампочка НЛ-4 типа МН-3 («Работа»), контролирующая режим «Работа»;
12. лампочка накаливания ЛН-2 типа МН-14, подсвечивающая шкалу на панели управления и контроля с надписью: «Прогрей магнетрон 3 минуты». Лампочка включается в режиме «Подготовка» и выключается в режиме «Работа» (в РЛС «Донец-2»может отсутствовать).
Экран электронно-лучевой трубки обрамляют две шкалы: наружная – неподвижная и внутренняя - подвижная связанная с линией механического визира (узел И-4). Неподвижная шкала предназначена для отсчёта пеленгов.
Подвижная шкала связана с механическим визиром, на линии которого нанесены риски для более точного отсчёта дистанции до пеленгуемого объекта.
Выпрямитель (прибор В) предназначен для выработки, совместно с выпрямителями приборов П и И, необходимых стабилизированных и нестабилизированных напряжений, обеспечивающих работу приборов и узлов станции. В приборе расположены, также, устройство для подогрева, гнезда для контроля напряжений, предохранители цепей питания и тумблеры для включения подогрева приборов А; П; И; В.
Агрегат питания РЛС «Донец» предназначен для питания станции от судовой сети. Он снабжен пускорегулировочной аппаратурой. Тип агрегата выбирается в зависимости от напряжения судовой сети и вырабатывает переменный ток частотой 427 Гц напряжением 230 в.
СТАНЦИЯ «МИУС»
НАЗНАЧЕНИЕ
Судовая НРЛС «Миус» предназначен для повышения безопасности плавания и решения навигационных задач. Устанавливается на судах, водоизмещением свыше 300 тонн.
2.2. ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
- длина волны 3,2 см.;
- максимальная импульсная мощность передатчика – 7 кВт;
- индикация осуществляется на 7 шкалах дальности 0,4; 0,8; 1,6; 4; 8; 16 и 24 мили с интервалами между кольцами дальности соответственно: 0,2; 02; 0,4; 1; 2; 4 и 6 миль;
- максимальная дальность обнаружения цели с вероятностью 0,5 при стандартной атмосферной рефракции, высоте установки антенны 15 м. над уровнем моря, длине волновода 10 м.; судна, водоизмещением 3000 тонн – не менее 10 миль; среднего морского буя высотой 3,2 м. Без отражателя – не менее 2 миль;
- минимальная дальность с вероятностью 0,5 того же морского буя при тех же условиях – не более 30 метров;
- разрешающая способность с вероятностью 0,5 по дальности на шкале 0,4 мили – не более 25 м. По направлению на шкале 1,6 мили – не более 10;
- максимальная погрешность измерения дальности: на шкалах до 1,6 мили. – не более 50 м. на шкалах 4-24 мили – не более 1% шкалы дальности;
- максимальная погрешность измерения направления - 10;
- обзор круговой, непрерывный в пределах 3600, скорость обзора (вращение антенны) – 18об/мин.
- диаметр экрана ЭЛТ индикатора – 180 мм.
- длительность и частота следования зондирующих импульсов: на шкалах до 4 миль вкл. – 0,1 мкс – 3100 имп./сек. на шкалах свыше 4 миль – 0,3 мкс – 2000 имп./сек.
- импульсная чувствительность приемно-индикаторного тракта на шкалах до 4 миль – хуже 120 дБ/Вт. на шкалах свыше 4 миль – не хуже 122 дБ/Вт. подстройка частоты гетеродина приемника – автоматическая;
- ширина диаграммы направленности антенны: в вертикальной плоскости – 200 в горизонтальной плоскости – 10;
- время приведения станции в рабочий режим с момента включения – не более 4 мин;
- время непрерывной работы станции – не менее 48 часов.
- эксплуатационный контроль функционирования станции и работоспособности её функциональных блоков и узлов осуществляется встроенной автоматизированной системой контроля;
- электропитание осуществляется от бортовой сети: постоянного тока напряжением 110 и 220 В.; переменного трёхфазного тока напряжением 220 и 380 В с частотой 50 Гц; переменного однофазного тока напряжением 220 В с частотой 400 Гц.
УСТРОЙСТВО И РАБОТА СТАНЦИИ
В зависимости от функций, выполняемых станцией, а также от назначения, типа и проекта судна по приборному составу станция имеет 3 модификации:
- приборный состав станции для модификации 1 показан на рис. 1.
- В модификации 2, вместо ретранслятора, (прибора Р) станция имеет прибора Г (устройство сопряжения с гирокомпасом) и прибор К (сетевой коммутатор), для подключения электродвигателя антенны к бортовой сети.
- В модификации 3 предусмотрена ориентация только по курсу, поэтому приборы Р и Г – отсутствуют, а есть, вместо них, только сетевой коммутатор (прибор К).
В состав станции 1 модификации входят:
(Рис. 1)
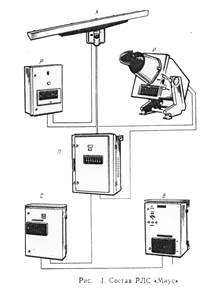
1. Прибор А (антенна и волноводный тракт)
2. Прибор И (индикатор)
3. Прибор П (приёмопередатчик)
4. Прибор Р (ретранслятор)
5. Прибор В (сетевой выпрямитель)
6. Прибор С (сетевой статический преобразователь)
Рассмотрим назначение и характеристику приборов станции:
Прибор А – Антенно-волноводное устройство.
Назначение: канализация СВЧ энергии от передатчика, направленное излучение её в пространство, направленный приём отражённой от объектов части излучённой энергии, передача её к приёмному устройству (по тому же волноводу), а также выдача данных углового положения антенны относительно ДП судна и контроля энергетической характеристики станции с помощью контрольной антенны.
Прибор П – Приёмопередатчик.
Назначение: формирование и генерирование СВЧ импульсов, преобразование и усиление отражённых от объектов сигналов, принятых антенной, а также электропитание всех блоков станции выпрямленным напряжением и контроль работы сменных блоков и узлов. В приборе П вырабатываются синхроимпульсы, обеспечивающие синхронизацию по времени начала развёртки в приборе П и излучения зондирующих импульсов прибором А.
Прибор И – Индикатор.
Назначение: индикация на экране ЭЛТ сигналов, отражённых от объектов, определение координат этих объектов по направлению (курсовому углу или пеленгу) и дальности, а также упраление работой всей станции.
Прибор Р – Ретранслятор.
Назначение: ретрансляция в прибор И данных углового положения антенны относительно ДП судна, сопряжение станции с гирокомпасом а также управление ориентацией изображения на экране индикатора (по курсу или по меридиану).
Прибор В – Сетевой выпрямитель.
Назначение: преобразует бортовую сеть напряжением 220 /380 В, частотой 50 Гц в постоянное напряжение 220 В.
Прибор С – Сетевой статический преобразователь.
Назначение: преобразование бортовой сети постоянного тока (или выходного напряжения прибора В) в напряжение питания устройств станции: переменным током напряжением 220 В с частотой 400 Гц.
Рассмотрим принцип работы приборов станции.
Антенное устройство (прибор А) состоит из следующих функциональных блоков:
- щелевая антенна, предназначена для формирования диаграммы направленности зондирующих импульсов. Антенна представляет собой секториальный рупор, в вершине которого помещён щелевой волноводный излучатель. Он формирует диаграмму направленности в горизонтальной плоскости. В вертикальной плоскости диаграмму направленности формирует сама конструкция рупора.

С помощью регулировочных винтов, фильтра и нагрузки осуществляет регулировка диаграмма направленности и подавление паразитных составляющих диаграммы направленности.
- Привод с редуктором – обеспечивает круговые вращения антенны со скоростью 18±4 об/мин а также передачу данных об угловом положении антенны относительно ДП судна. Тип электродвигателя привода определяется напряжением бортовой сети. Данные об угловом положении антенны формируются вращающимся трансформатором (ротор которого механически связан с редуктором) и передаются, с помощью следящей системы в прибор Р в виде курсового угла. Рядом с редуктором расположены контакты отметки курса, которые замыкаются на момент пересечения максимум диаграммы направленности антенны диаметральной плоскости судна.
Внутри вала вращения антенны находятся вращающийся СВЧ переход, предназначенный для соединения вращающейся щелевой антенны с неподвижным волноводом (рис. 3).
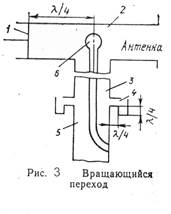
Электромагнитные колебания передатчика распространяются в прямоугольном волноводе и возбуждают симметричный тип колебаний в отрезке коаксиальной линии. Центральный проводник коаксиального отрезка является возбуждающим штырём с которого энергия СВЧ передается щелевой антенне. Настройка вращающегося перехода осуществляется с помощью плунжера.
Контрольная антенна – обеспечивает контроль энергетической характеристики РЛС. Фиксированное положение контрольной антенны (КУ=1800) и её энергетических параметров позволяют судить об исправной работе передающего тракта и щелевой антенны (путём сравнения контрольного, от контрольной антенны и зондирующего импульса).
Приёмопередатчик (Прибор П) состоит из:
- Передающего устройства, которое, в свою очередь состоит из следующих блоков: Блок П – 1 (модулятор), предназначен для: формирования модулирующих импульсов, управляющих работой магнетронного генератора СВЧ; формирования синхронизирующих импульсов, обеспечивающих синхронную работу передатчика и индикатора; выработку и формирования импульсов запуска временной автоматической регулировки усиления (ВАРУ) сигналов, отражённых от близкорасположенных целей (рис. 4).

- Блок П – 2 (блок СВЧ) обеспечивает работу передатчика и приёмника на общий антенный канал, осуществляет преобразование сигналов СВЧ, отражённых от целей, в сигналы промежуточной частоты и защищает вход приёмного устройства от воздействия мощных импульсов своего передатчика и случайных сигналов других РЛС.

- Приёмного устройства (блок П - 3) (рис. 5), предназначенного для усиления сигналов промежуточной частоты, формирования их амплитудной характеристики, детектирования сигналов промежуточной частоты и усиления видеосигналов.
- Блок П – 4 (блок автоматической подстройки частоты) предназначен для поддержания постоянной, (равной промежуточной частоте) разности частот клистронного генератора (гетеродина) и магнетрона.
- Блоков и узлов, предназначенных для выработки необходимых напряжений питания прибора П и анализа работоспособности его блоков.
Индикатор (прибор И).

Состав прибора:
- Блок И – 1 – блок развёртки.
- Блок И – 2 – блок меток дальности.
- Блок И – 3 – видеосмеситель.
- Блок И – 4 – выпрямитель.
- Блок И – 5 – механизм шкал.
- Блок И – 6 – формирователь визира дальности.
- Цепи ЭЛТ и элементы отметки курса.
- Пульт управления.
Рассмотрим назначение и принципы работы этих блоков и узлов:
Блок И – 1 – (генератор развёртки) предназначен для формирования:
1) импульса тока развёртка. В зависимости от шкалы дальности длительность импульсов пилообразного тока развёртки, составляют:
12 мкс – на шкалах 0,4 Р; 0,4; 0,8 мили.
23 мкс – на шкалах 1,6 мили.
55 мкс – на шкалах 4,0 мили.
40 мкс – на шкалах 8,0 миль.
205 мкс – на шкалах 16,0 миль.
330 мкс – на шкалах 24,0 миль.
Частота повторения импульсов тока развёртки, подсвета прямого хода развёртки, запуска блока И – 2 и импульсов контроля:
3000 импульсов на шкалах 0,4Р; 0,4; 0,8; 1,6; 4,0 мили.
2000 импульсов на шкалах 8,0 и 16,0 миль.
1000 импульсов на шкале 24,0 мили.
2) импульса подсвета прямого хода развёртки
3) импульса запуска блока И – 2. Дальность и частота следования импульсов подсветки и запуска указана выше. Синхронизирующие импульсы, вырабатываемые в приборе П, поступают в блок И – 1 на на линии задержки для запуска мультивибратора шкал дальности. С помощью линий задержки обеспечивается синхронизация начала развёртки на различных шкалах дальности и зондирующего импульса. Схемой предусмотрено, также формирование импульсов подсветки, импульсов развёртки и импульсов запуска блока И – 2. Импульсы подсвета, после ряда преобразований подаются на модулятор ЭЛТ.
Блок И – 2 (блок меток дальности) предназначен для формирования импульсов меток дальности.
Импульсы запуска, с блока И – 1 поступают на генератор ударного возбуждения, который выра





