Положение обрабатываемой детали, на станке относительно инструмента, определившееся с помощью установочных элементов, может быть нарушено под действием сил резания, которые при некоторых видах обработки достигают величины в несколько тысяч ньютонов. Силы резания, кроме того, могут вызвать вибрации детали, которые могут привести к значительным погрешностям обработки и отрицательно действуют на сохранность инструмента, приспособления и станка. Поэтому необходимо надежное крепление детали в приспособлении с помощью тех или других зажимных устройств. В общем случае зажимное устройство включает: элементы, непосредственно или с помощью промежуточных деталей действующие на обрабатываемую деталь (зажимные элементы), устройства, приводящие в действие зажимные элементы, передаточные механизмы и механизмы, вырабатывающие необходимую энергию для привода в действие зажимного устройства.
Однако силами зажима также можно сместить обрабатываемую деталь в приспособлении. Поэтому одним из главных требований при конструировании зажимных устройств является обеспечение соответствующего направления сил зажима и способов их приложения.
В практике машиностроения широкое распространение получили следующие устройства: винтовые (сила зажима создается, с помощью резьбовых деталей); рычажные (сила зажима создается рычагами первого и второго рода); эксцентриковые (сила зажима создается криволинейными кулачками-эксцентриками); клиновые устройства (сила, зажима обрабатываемой детали создается с помощью различных клиньев); пружинные (сила зажима детали обеспечивается упругими силами пружин).
Нередко в качестве силового источника используются силы резания, которые возникают в процессе данной обработки, а также центробежные силы вращающихся частей приспособления и, наконец, силы, приводящие в движение рабочие органы станков, например силы подачи столов фрезерных станков, ползунов строгальных станков и др. Во многих случаях, например в вакуумных приспособлениях, трудно строго отделить зажимной элемент приспособления от передаточного устройства, а последнее от привода.
По степени механизации зажима и управления приспособления можно разделить на приспособления с ручным приводом; механизированные, в которых с помощью дополнительных устройств облегчается труд рабочего и повышается производительность труда; автоматизированные, в которых используется энергия сжатого воздуха, жидкости, находящейся под большим давлением, электрическая, магнитная, электромагнитная и вакуумная энергия.
Зажимное устройство должно не только развивать необходимую силу для закрепления детали, но и сохранять эту силу в процессе всей обработки даже в случаях, когда источник энергии после развития необходимой силы отключается до момента очередного закрепления. Следовательно, в зажимном устройстве должна быть самотормозящаяся кинематическая пара.
Наиболее широко в приспособлениях применяются винтовые, клиновые и эксцентриковые самотормозящиеся кинематические пары. В приспособлениях с ручным приводом такие пары обеспечивают безопасную работу и освобождают рабочего на время выполнения данной операции, что облегчает его труд и создает возможность одновременного обслуживания им нескольких станков. В механизированных и автоматизированных приспособлениях самотормозящиеся кинематические пары позволяют, кроме того, повысить зажимной эффект привода и, разгружая его на время обработки, экономить электроэнергию.
Определение необходимых сил закрепления деталей в приспособлениях не представляет особой сложности, однако при любом расчете, особенно в случае, когда необходимо учитывать силы трения, требуется тщательная подготовка расчетной схемы. На схеме должны быть точно отмечены точки приложения всех сил, действующих в системе приспособление—деталь—инструмент, и направления их действия.
Составить такую схему не всегда просто, так как величина и направление сил, действующих на обрабатываемую деталь, зависят от многих факторов: характера операции, выбранной схемы установки детали в приспособлении, способа закрепления детали, от упругих свойств материалов тел, входящих в систему станок—приспособление—инструмент, то нельзя предложить конкретную, пригодную для всех возможных случаев обработки деталей методику определения сил зажима.
Во многих случаях для точного решения этой задачи потребовалось бы составление сложных дифференциальных уравнений движения. Однако известно, что многие задачи динамики с достаточной для практики точностью можно решить на основании известных из механики относительно простых законов статики о равновесии тел, находящихся под действием внешних приложенных сил, включая и силы инерции движущихся масс.
Таким образом, можно указать в общем виде следующую методику определения зажимных сил:
1. Составить расчетную схему, т.е. на схеме установки изобразить все силы, действующие на деталь: силу резания, зажимные усилия, реакции опор и силы трения в местах контакта детали с установочными элементами и зажимными устройствами.
Расчетную схему следует составлять для наиболее неблагоприятного варианта местоположения режущего инструмента по длине обрабатываемой поверхности, при котором для удержания детали от перемещения и поворота под действием сил резания требуется приложить наибольшее зажимное усилие.
2. Составить уравнение сил и моментов из условия равновесия детали. Для составления уравнения сил необходимо установить направление возможного перемещения детали под действием сил резания и определить величину проекций на направляемые перемещения силы резания и сил трения. Уравнение сил можно составить в таком виде: сумма проекций всех сил, удерживающих деталь, равна проекции силы резания.
3. Для составления уравнения моментов необходимо установить точку, относительно которой возможен поворот детали под действием сил резания, и определить относительно этой точки момент сил, удерживающих деталь, и момент силы резания.
4. Ввести коэффициент надежности закрепления k, учитывающий возможное в процессе обработки увеличение силы резания по сравнению с расчетной. Увеличение силы резания может произойти из-за затупления инструмента, внезапного изменения величины припусков и других факторов.
5. Коэффициент k учитывает также возможное изменение условий закрепления в процессе обработки. Для удобства расчетов коэффициент k можно ввести в полученное уравнение сил путем умножения на k силы резания, сдвигающей деталь, а в уравнение моментов - путем умножения на k момента силы резания.
6. Определить необходимую величину зажимного усилия из полученных уравнений и моментов.
Примеры расчёта закрепления деталей в станочных приспособлениях
Пример 1. На операции фрезерования паза (рис.6.1, а) при принятых методе обработки и схеме закрепления деталь под действием сил резания может перемещаться вдоль опорных пластин. Составляющая силы резания, вызывающая перемещение детали равна Pр.
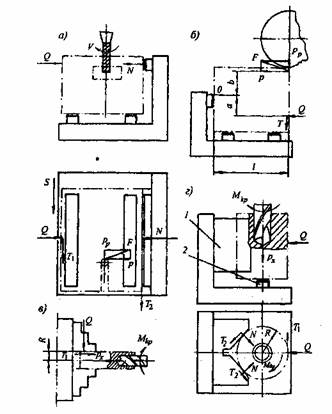
Рис. 6.1. Определение величины зажимного усилия, удерживающего деталь: а - от перемещения; б - от поворота; в -от перемещения и провертывания; г - от провертывания
Реакция опоры составляет
N = Q+P. (6.1)
Силы трения в местах контакта детали с зажимным устройством Т 1 и установочными элементами Т 2 соответственно будут равны
Т1 = f1Q, (6.2)
T2 = f2N = f2(Q + P),
где f1 - коэффициент трения между деталью и зажимными устройствами; f2 - коэффициент трения между деталью и установочными элементами; Q - усилие зажима; Р - составляющая силы резания; N- реакция опоры.
Уравнение сил, составленное из условия равновесия детали, будет
Т1+ T2 = Pр,. (6.3)
С учетом уравнений (6.2) и введения коэффициента k имеем
f1Q + f2 (Q+P) = kPp, (6.4)
откуда
 . (6.5)
. (6.5)
Пример 2. На операции фрезерования плоскости (рис.6.1, б) при принятых методе установки и схеме закрепления деталь под действием сил резания может только поворачиваться относительно точки О.
Из условия равновесия детали уравнение моментов запишется как
Qa + Тl = Pb + Ppl. (6.6)
После подстановки значения Т = fQ и введения коэффициента надежности k уравнение (6.6) примет вид
Qa + fQl=k(Pb + Ppl), (6.7)
откуда
 , (6.8)
, (6.8)
где f - коэффициент трения между деталью и зажимными устройствами.
Остальные величины показаны на рис.6.1, б.
Пример 3. При сверлении отверстия в детали, закрепленной в трехкулачковом патроне (рис.6.1, в), та может перемещаться вдоль кулачков под действием силы резания Рх (усилие подачи) и поворачиваться в кулачках под действием момента резания Mkp. Необходимо приложить такое зажимное усилие, чтобы не было ни перемещения, ни провёртывания детали относительно кулачков. В зависимости от формы насечки на кулачках сопротивление перемещению и провёртыванию может быть различным, так как при этом могут быть разными коэффициенты трения.
Допустим, что при перемещении детали в кулачках вдоль ее оси коэффициент трения будет f1, а при проворачивании -f2. Тогда сила трения между кулачком и деталью будет составлять при перемещении
T 1 = f 1 Q, (6.9)
при провёртывании
T 2 = f 2 Q. (9.10)
Определим величину зажимного усилияпри условии недопустимости перемещения в кулачках. Пользуясь принятыми обозначениями (см. рис.4.3,в) и имея в виду, что у патрона три кулачка, составим уравнение сил
3 T 1 = Рx. (6.11)
После подстановки T 1 и введения коэффициента k уравнение примет вид
3 f 1 Q = kРx, ' (6.12)
откуда
 . (6.13)
. (6.13)
Теперь определим величину зажимного усилия при условии недопустимости провертывания детали в кулачках. Так как деталь зажата в трех кулачках, уравнение моментов будет иметь следующий вид
3 Т 2 R = M кр , (6.14)
где M кр - момент силы трения; Т 2 - сила трения между кулачком и деталью при провертывании последней; R - радиус наружной цилиндрической поверхности детали на участке закрепления ее в кулачках.
После подстановки значения Т 2 и введения коэффициента k уравнение примет вид
3 f 2 QR = kM кр , (6.15)
откуда
 .
.
Пример 4. На операции сверления отверстия в детали, установленной на призму 1 и опорный штырь 2 (рис.6.1, г), возможен только поворот детали относительно ее оси под действием момента. При составлении уравнения моментов относительно оси детали трением детали об опорный штырь 2 можно пренебречь, так как будем полагать, что усилие резания Рx полностью воспринимается силами трения на поверхности призмы и реакция опорного штыря равна нулю.
С учетом сказанного уравнение моментов будет
3 Т 2 R + T1R = M кр ,(6.16)
где R - радиус наружной цилиндрической поверхности детали на участке контакта с призмой.
Обозначим коэффициент трения между деталью и зажимным устройством f 1, а между деталью и призмой 1 f 2. Тогда
T 1 = f 1 Q,
T 2 = f 2 N. ( 6.17)
Для призмы с углом γ= 90° имеем
Q = 2Nsin45°,(6.18)
откуда
 . (6.19)
. (6.19)
После подстановки в уравнение моментов сил T 1, T 2 и N ополучим
 . (6.20)
. (6.20)
После введения коэффициента k уравнение примет следующий вид
 ,(6.21)
,(6.21)
откуда
 . (6.22)
. (6.22)
При расчетах по определению величины зажимного усилия для коэффициентов трения детали в местах контакта с установочными элементами и зажимными устройствами можно принимать следующие значения: f = 0,16...0,18 - при контакте с гладкой плоской поверхностью; f = 0,18...0,30 - при контакте по линии и со сферой; f =0,50...0,80 - при контакте с рифлеными (насеченными) поверхностями.






