СОДЕРЖАНИЕ
Введение............................................................................................................ 3
1. Задание на расчет............................................................................. 6
2. ИСХОДНЫЕ ДАННЫЕ……………………………………………………….7
3. РАСЧЕТ УСТРОЙСТВА............................................................................ 9
3.1. Определение конструктивного показателя устройства........................ 9
3.2. Определение индукции в рабочем зазоре................................................. 9
3.3. Выбор материала магнитопровода.......................................................... 9
3.4. Определение площади поперечного сечения магнитопровода и якоря…………………………………………………………………………………10
3.5. Определение рабочей МДС...................................................................... 11
3.6. Определение параметров обмотки управления..................................... 12
3.6.1. Расчет длины и ширины обмотки управления (размеров окна обмотки) 12
3.6.2. Определение внутреннего диаметра обмотки управления ............ 13
3.6.3. Выбор марки проводов обмотки управления................................... 14
3.7. Выбор остальных размеров устройства................................................. 15
3.8. Построение тяговых и механических характеристик ……………… …16
3.9. Расчет коэффициента возврата.............................................................. 19
3.10. Расчет времени срабатывания и времени отпускания................... 20
ЗАКЛЮЧЕНИЕ................................................................................................... 22
ЛИТЕРАТУРА..................................................................................................... 23
ВВЕДЕНИЕ
Бурное развитие техники, широкая и глубокая механизация и автоматизация производственных процессов для обеспечения высокой надёжности, комфортабельности, безопасности и безаварийности работы оборудования обусловили необходимость освоения высоких скоростей, ускорений, давлений, температур, токов, напряжений и др., что требует постоянного совершенствования методов расчёта и конструирования элементов, узлов и деталей используемых устройств, детальной разработки новых методов исследования с целью изыскания оптимальных форм, размеров, материалов, схем сигналов управления, а также применения новых технологий, новых устройств, аппаратов, деталей, узлов и элементов, в которых реализуются самые новейшие и совершенные принципы действия.
Современное общество не может развиваться без широкого использования электрических и электронных аппаратов и устройств на их основе - технических средств управления потоками энергии (электрической, механической, гидравлической и др.) и информации, предназначенных для:
• включения и отключения электрических цепей объектов, участвующих в получении, преобразовании, передаче, распределении, накоплении, хранении и потреблении электроэнергии;
• контроля и измерения параметров указанных объектов;
• зашиты этих объектов от несанкционированных режимов работы;
• управления технологическими процессами;
• регулирования (поддержания на неизменном уровне или изменения
по определенному закону) параметров в отмеченных выше объектах и процессах;
• преобразование неэлектрических величин в электрические;
• создания магнитного поля определенного уровня и направления в отведенном объеме [1].
Области применения и использования электрических и электронных
аппаратов и устройств на их основе чрезвычайно разнообразны: робототехника; вычислительная и измерительная техника; авиа-, судо- и автомобилестроение; космическая и спецтехника; медицина; бытовая техника; игрушки и т.п. Стоит, например, напомнить , что для управления одним электродвигателем требуется до десяти, а иногда и более, разнообразных электрических аппаратов.
Электрические аппараты могут быть созданы на базе различных принципов действия. Очень широко в технике используются электромеханические системы, позволяющие создавать устройства, преобразующие электрическую энергию в механическую и наоборот.
Среди электромеханических систем заметное место занимают устройства электромагнитного типа [1].
Целью типового расчёта является:
• углубление, расширение и закрепление соответствующих разделов
теоретической части курса;
• приобретение определённых навыков по расчёту электромеханических
систем электромагнитного типа;
• самопроверка знаний и умений, приобретённых студентом на лекциях,
упражнениях, лабораторных занятиях и консультациях;
•проверка подготовленности самостоятельно решать инженерные задачи: ставить
разумные ограничения и принимать обоснованные допущения.
Задачей типового расчёта является:
• совершенствование умений по подбору необходимой научной,
справочной и методической литературы и умелого пользования ею;
• приобретение навыков безбоязненного, самостоятельного анализа
вопросов, которые могут встретиться при выполнении типового
расчёта или в последующей трудовой деятельности;
• закрепление полученных ранее навыков оформления рисунков, графиков, эскизов и небольших чертежей.
Принцип действия устройства
Упрощенная схема устройства дана на рис. 1. Устройство состоит из магнитопровода 1, якоря 2, обмотки управления 3. Возвратная пружина, а также упор, предназначенный для обеспечения заданного значения начального зазора, на схеме не показаны. При подаче на обмотку управления постоянного напряжения  через обмотку протекает ток
через обмотку протекает ток  , где
, где  - электрическое сопротивление обмотки. Под действием этого тока создается МДС обмотки
- электрическое сопротивление обмотки. Под действием этого тока создается МДС обмотки  , в результате чего по закону полного тока создается определенное магнитное поле, характеризующееся напряженностью
, в результате чего по закону полного тока создается определенное магнитное поле, характеризующееся напряженностью  . Возникает индукция
. Возникает индукция  , которая создает магнитный поток
, которая создает магнитный поток  , направление протекания которого показано на рис. 1. При протекании магнитного потока в рабочем воздушном зазоре возникает электромагнитные силы
, направление протекания которого показано на рис. 1. При протекании магнитного потока в рабочем воздушном зазоре возникает электромагнитные силы  взаимно притягивающие якорь и магнитопровод. На рис.1. не показаны потоки выпучивания и рассеяния.
взаимно притягивающие якорь и магнитопровод. На рис.1. не показаны потоки выпучивания и рассеяния.
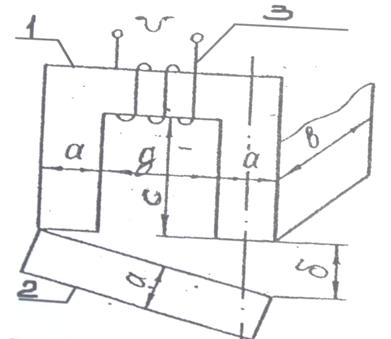
Рис. 1. Принципиальная схема устройства
1-магнитопровод; 2- якорь; 3- обмотка управления.
ЗАДАНИЕ НА РАСЧЕТ
• Ознакомиться с заданием, всесторонне осмыслить его и осознать всю
глубину и важность предстоящей работы.
• Подобрать необходимую учебную, методическую и справочную литературу.
• Подсчитать конструктивный показатель Пк электромагнитного устройства и по нему выбрать начальную индукцию Вн в рабочемзазоре (при δ = δн ).
• Выбрать материал магнитопровода и дать ее кривую намагничивания.
• Рассчитать и выбрать отношение  длины lк обмотки управления к ее толщине hк.
длины lк обмотки управления к ее толщине hк.
• Найти параметры обмотки управления (длину lк обмотки, её толщину hк, марку и диаметр dc стандартного провода, а также число витков N).
• Определить истинную температуру нагрева обмотки.
• Подобрать конечный зазор δк устройства.
• Выбрать все размеры ферромагнитных участков устройства.
• Рассчитать тяговые Рэ(δ) характеристики при МДС Fcp, Fp
и Fотп и построить их на одном графике в одинаковых масштабах с
противодействующей характеристикой Рмх(δ) , т.е.показать их согласование.
• Найти коэффициент возврата.
• Вычислить времена срабатывания и отпускания устройства.
• Сделать заключение и привести основные выводы по проделанной работе.
• Дать полезные советы и рекомендации последующим поколениям студентов, которым предстоит в будущем выполнять подобный расчёт.
• Изобразить схему устройства.
2. ИСХОДНЫЕ ДАННЫЕ:
2 .1. Номер N варианта
Номер N варианта подсчитываем по соотношению
 ,
,
Где  =3;
=3;  =2;
=2;  =1;
=1;  =3;
=3;  =6.
=6.
Получаем  .
.
2.2. Температура окружающей среды tокр = 35○С.
2.3. Максимальное превышение температуры провода обмотки управления  = 50 ○С.
= 50 ○С.
2.4. Жесткость С возвратной пружины, значение которой в Н/мм выбираем по табл.1 на основании остатка ОЗ от деления номера N варианта на 12.
N/12=36/12= 3 , О3= 0
Таблица1. К выбору жесткости С возвратной пружины
| 03
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| С, Н/мм
| 1
| 2
| 3
| 4
| 5
| 6
| 1,5
| 2,5
| 3,5
| 4,5
| 5,5
| 6,5
|
С=1 Н/мм.
2.5. Напряжение Uy питания (управления) обмотки управления(может иметь колебания относительно номинального значения на  ) выбираем по табл.2 на основании остатка 04 от деления номера N варианта на 10. N /10=36/10=3.6,04=6
) выбираем по табл.2 на основании остатка 04 от деления номера N варианта на 10. N /10=36/10=3.6,04=6
Таблица 2. К выбору напряжение питания (управления)
| 04
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
|
| Uy , В
| 4,5
| 6,3
| 9
| 12
| 18
| 24
| 36
| 48
| 110
| 220
|
Uy= 36  В.
В.
2.6. Начальный рабочий зазор δн выбираем на основании табл.3 по остатку 05 от деления номера N варианта на 12.
N/12=36/12=3, 05=0
Таблица 5. К выбору начального рабочего зазора δн устройства
| 05
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| δн, мм
| 1
| 2
| 4
| 8
| 16
| 32
| 64
| 5
| 10
| 20
| 30
| 40
|
δн=1мм.
2.7. Конечный зазор δк устройства выбираем самостоятельно из условия отсутствия насыщения магнитной системы в конечном положении системы. Предварительно конечный зазор δк принимаем δк = 0,1δн=0,01 мм.
2.8. Начальная электромагнитная сила Рэн, соответствующая начальному
зазору δн подсчитываем по соотношению:
 ,
,
Где =3; =2; =1; =3; =6.
Получаем  Н.
Н.
РАСЧЕТ УСТРОЙСТВА
Определение рабочей МДС
Вначале определяем МДС  , необходимую для проведения основного магнитного потока через воздушные промежутки. МДС рассчитывают по соотношению [1]:
, необходимую для проведения основного магнитного потока через воздушные промежутки. МДС рассчитывают по соотношению [1]:
 , (10)
, (10)
где Kпн = 1,15 - коэффициент, учитывающий наличие паразитных немагнитных зазоров на пути основного, рабочего магнитного потока в начальном положении системы, а также влияние потоков рассеянья и возможное увеличение индукции в отдельных участках магнитной цепи.
Найдем МДС срабатывания Fср из преобразованной «энергетической» формулы [6]:
 , (11)
, (11)
где  - текущий воздушный зазор,
- текущий воздушный зазор,  - суммарная проводимость зазора .
- суммарная проводимость зазора .
Суммарная проводимость зазора между полюсами определяется формулой (для упрощения расчета будем считать, что поле в рабочем зазоре равномерное) [4]:
 . (12)
. (12)
Значение производной проводимости по воздушному зазору при его начальном значении:
 , (13)
, (13)
где  =0,001мм –воздушный зазор при котором происходит срабатывание устройства.
=0,001мм –воздушный зазор при котором происходит срабатывание устройства.
Вычислим МДС срабатывания:
 . (14)
. (14)
Для расчета рабочей МДС выбираем большее из значений  и Fср., то есть
и Fср., то есть  А.
А.
Выбираем коэффициент запаса КЗ (вводимый для гарантии срабатывания устройства при пониженном напряжении, при наличии неточностей в изготовлении и т.п.) в пределах 1,2…1,8 [1]. Принимаем КЗ=1,5.
Тогда рабочая МДС определяется соотношением:
 . (15)
. (15)
ЗАКЛЮЧЕНИЕ
В типовом расчёте я ознакомился с одной из возможных методик расчёта электромеханических систем, позволяющей, хотя бы в первом приближении, выбирать необходимые размеры магнитопровода и параметры обмотки управления (габариты, диаметр провода и число витков), для которых при принятом напряжении питания обмотки управления будет обеспечиваться необходимая электромагнитная сила. Выполнение этого типового расчета было увлекательно, занимательно и, что наиболее важно, познавательно. Я уверен, что человеку, занимающемуся автоматизацией технологических процессов, имеющих место на тепловых электрических станциях, непременно придется столкнуться с реле, контакторами, пускателями, контроллерами, датчиками, предохранителями, выключателями высокого напряжения, выключателями нагрузки, пакетными выключателями, рубильниками, и другими видами электрических аппаратов. Несомненно, этот типовой расчет является лишь скромным введением в теорию электрических аппаратов, но навыки полученные при его выполнении никогда не помешают настоящему инженеру.
Тем студентам, которые будут выполнять подобный расчет после меня, хочу пожелать терпения.
ЛИТЕРАТУРА
1. Коробков Ю.С. Расчет электромеханических устройств электромагнитного типа: Методические указания по курсу «Электротехнические системы». М.: Издательство МЭИ, 1995.
2. Справочник по электротехническим материалам./Под ред. Ю.В. Корицкого, В.В. Пасынкова, Б.М. Тареева, Л.: Энергоатомиздат, Т.3, 1998.
3. Геометрия: Учебник для 7-9 кл. общеобразоват. учреждений./ Л.С. Атанасян, В.Ф. Бутузов, С.Б. Кадомцев и др. –8-е изд. – М.: Просвещение, 1988.
4. Коробков Ю.С., Флора В.Д. Электромеханические аппараты автоматики. М.: Энергоатомиздат, 1991.
5. Иванова Г.М., Кузнецов Н.Д., Чистяков В.С. Теплотехнические измерения и приборы: Учебник для вузов. М.: Энергоатомиздат, 1984.
6. Бородина М.Г. Расчет электромагнитов постоянного тока: Учебное пособие для курсового проектирования по курсам «Электромеханические аппараты автоматики» и «Электрические аппараты управления». М.: Моск. энерг. ин-т, 1979.
7. Чунихин А.А. Электрические аппараты: Общий курс. Учебник для вузов. –3-е изд., М.: Энергоатомиздат, 1988.
СОДЕРЖАНИЕ
Введение............................................................................................................ 3
1. Задание на расчет............................................................................. 6
2. ИСХОДНЫЕ ДАННЫЕ……………………………………………………….7
3. РАСЧЕТ УСТРОЙСТВА............................................................................ 9
3.1. Определение конструктивного показателя устройства........................ 9
3.2. Определение индукции в рабочем зазоре................................................. 9
3.3. Выбор материала магнитопровода.......................................................... 9
3.4. Определение площади поперечного сечения магнитопровода и якоря…………………………………………………………………………………10
3.5. Определение рабочей МДС...................................................................... 11
3.6. Определение параметров обмотки управления..................................... 12
3.6.1. Расчет длины и ширины обмотки управления (размеров окна обмотки) 12
3.6.2. Определение внутреннего диаметра обмотки управления ............ 13
3.6.3. Выбор марки проводов обмотки управления................................... 14
3.7. Выбор остальных размеров устройства................................................. 15
3.8. Построение тяговых и механических характеристик ……………… …16
3.9. Расчет коэффициента возврата.............................................................. 19
3.10. Расчет времени срабатывания и времени отпускания................... 20
ЗАКЛЮЧЕНИЕ................................................................................................... 22
ЛИТЕРАТУРА..................................................................................................... 23
ВВЕДЕНИЕ
Бурное развитие техники, широкая и глубокая механизация и автоматизация производственных процессов для обеспечения высокой надёжности, комфортабельности, безопасности и безаварийности работы оборудования обусловили необходимость освоения высоких скоростей, ускорений, давлений, температур, токов, напряжений и др., что требует постоянного совершенствования методов расчёта и конструирования элементов, узлов и деталей используемых устройств, детальной разработки новых методов исследования с целью изыскания оптимальных форм, размеров, материалов, схем сигналов управления, а также применения новых технологий, новых устройств, аппаратов, деталей, узлов и элементов, в которых реализуются самые новейшие и совершенные принципы действия.
Современное общество не может развиваться без широкого использования электрических и электронных аппаратов и устройств на их основе - технических средств управления потоками энергии (электрической, механической, гидравлической и др.) и информации, предназначенных для:
• включения и отключения электрических цепей объектов, участвующих в получении, преобразовании, передаче, распределении, накоплении, хранении и потреблении электроэнергии;
• контроля и измерения параметров указанных объектов;
• зашиты этих объектов от несанкционированных режимов работы;
• управления технологическими процессами;
• регулирования (поддержания на неизменном уровне или изменения
по определенному закону) параметров в отмеченных выше объектах и процессах;
• преобразование неэлектрических величин в электрические;
• создания магнитного поля определенного уровня и направления в отведенном объеме [1].
Области применения и использования электрических и электронных
аппаратов и устройств на их основе чрезвычайно разнообразны: робототехника; вычислительная и измерительная техника; авиа-, судо- и автомобилестроение; космическая и спецтехника; медицина; бытовая техника; игрушки и т.п. Стоит, например, напомнить , что для управления одним электродвигателем требуется до десяти, а иногда и более, разнообразных электрических аппаратов.
Электрические аппараты могут быть созданы на базе различных принципов действия. Очень широко в технике используются электромеханические системы, позволяющие создавать устройства, преобразующие электрическую энергию в механическую и наоборот.
Среди электромеханических систем заметное место занимают устройства электромагнитного типа [1].
Целью типового расчёта является:
• углубление, расширение и закрепление соответствующих разделов
теоретической части курса;
• приобретение определённых навыков по расчёту электромеханических
систем электромагнитного типа;
• самопроверка знаний и умений, приобретённых студентом на лекциях,
упражнениях, лабораторных занятиях и консультациях;
•проверка подготовленности самостоятельно решать инженерные задачи: ставить
разумные ограничения и принимать обоснованные допущения.
Задачей типового расчёта является:
• совершенствование умений по подбору необходимой научной,
справочной и методической литературы и умелого пользования ею;
• приобретение навыков безбоязненного, самостоятельного анализа
вопросов, которые могут встретиться при выполнении типового
расчёта или в последующей трудовой деятельности;
• закрепление полученных ранее навыков оформления рисунков, графиков, эскизов и небольших чертежей.
Принцип действия устройства
Упрощенная схема устройства дана на рис. 1. Устройство состоит из магнитопровода 1, якоря 2, обмотки управления 3. Возвратная пружина, а также упор, предназначенный для обеспечения заданного значения начального зазора, на схеме не показаны. При подаче на обмотку управления постоянного напряжения через обмотку протекает ток , где - электрическое сопротивление обмотки. Под действием этого тока создается МДС обмотки , в результате чего по закону полного тока создается определенное магнитное поле, характеризующееся напряженностью . Возникает индукция , которая создает магнитный поток , направление протекания которого показано на рис. 1. При протекании магнитного потока в рабочем воздушном зазоре возникает электромагнитные силы взаимно притягивающие якорь и магнитопровод. На рис.1. не показаны потоки выпучивания и рассеяния.
Рис. 1. Принципиальная схема устройства
1-магнитопровод; 2- якорь; 3- обмотка управления.
ЗАДАНИЕ НА РАСЧЕТ
• Ознакомиться с заданием, всесторонне осмыслить его и осознать всю
глубину и важность предстоящей работы.
• Подобрать необходимую учебную, методическую и справочную литературу.
• Подсчитать конструктивный показатель Пк электромагнитного устройства и по нему выбрать начальную индукцию Вн в рабочемзазоре (при δ = δн ).
• Выбрать материал магнитопровода и дать ее кривую намагничивания.
• Рассчитать и выбрать отношение длины lк обмотки управления к ее толщине hк.
• Найти параметры обмотки управления (длину lк обмотки, её толщину hк, марку и диаметр dc стандартного провода, а также число витков N).
• Определить истинную температуру нагрева обмотки.
• Подобрать конечный зазор δк устройства.
• Выбрать все размеры ферромагнитных участков устройства.
• Рассчитать тяговые Рэ(δ) характеристики при МДС Fcp, Fp
и Fотп и построить их на одном графике в одинаковых масштабах с
противодействующей характеристикой Рмх(δ) , т.е.показать их согласование.
• Найти коэффициент возврата.
• Вычислить времена срабатывания и отпускания устройства.
• Сделать заключение и привести основные выводы по проделанной работе.
• Дать полезные советы и рекомендации последующим поколениям студентов, которым предстоит в будущем выполнять подобный расчёт.
• Изобразить схему устройства.
2. ИСХОДНЫЕ ДАННЫЕ:
2 .1. Номер N варианта
Номер N варианта подсчитываем по соотношению
,
Где =3; =2; =1; =3; =6.
Получаем .
2.2. Температура окружающей среды tокр = 35○С.
2.3. Максимальное превышение температуры провода обмотки управления = 50 ○С.
2.4. Жесткость С возвратной пружины, значение которой в Н/мм выбираем по табл.1 на основании остатка ОЗ от деления номера N варианта на 12.
N/12=36/12= 3 , О3= 0
Таблица1. К выбору жесткости С возвратной пружины
| 03
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| С, Н/мм
| 1
| 2
| 3
| 4
| 5
| 6
| 1,5
| 2,5
| 3,5
| 4,5
| 5,5
| 6,5
|
С=1 Н/мм.
2.5. Напряжение Uy питания (управления) обмотки управления(может иметь колебания относительно номинального значения на ) выбираем по табл.2 на основании остатка 04 от деления номера N варианта на 10. N /10=36/10=3.6,04=6
Таблица 2. К выбору напряжение питания (управления)
| 04
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
|
| Uy , В
| 4,5
| 6,3
| 9
| 12
| 18
| 24
| 36
| 48
| 110
| 220
|
Uy= 36 В.
2.6. Начальный рабочий зазор δн выбираем на основании табл.3 по остатку 05 от деления номера N варианта на 12.
N/12=36/12=3, 05=0
Таблица 5. К выбору начального рабочего зазора δн устройства
| 05
| 0
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| δн, мм
| 1
| 2
| 4
| 8
| 16
| 32
| 64
| 5
| 10
| 20
| 30
| 40
|
δн=1мм.
2.7. Конечный зазор δк устройства выбираем самостоятельно из условия отсутствия насыщения магнитной системы в конечном положении системы. Предварительно конечный зазор δк принимаем δк = 0,1δн=0,01 мм.
2.8. Начальная электромагнитная сила Рэн, соответствующая начальному
зазору δн подсчитываем по соотношению:
,
Где =3; =2; =1; =3; =6.
Получаем Н.
РАСЧЕТ УСТРОЙСТВА
Определение конструктивного показателя устройства
Конструктивный показатель Пк устройства рассчитывается по формуле [1]:
 , (1)
, (1)
где РЭН - начальная электромагнитная сила, соответствующая начальному зазору.
Таким образом, конструктивный показатель устройства определится как:
 Н0,5/м. (2)
Н0,5/м. (2)






