Санкт-Петербург
2014
Содержание
Стр.
1. Техническое задание на курсовую работу 3
2. Введение 4
3. Обработка информации, поступающей с дискретных датчиков 7
4. Обработка информации поступающей с аналоговых датчиков 12
5. Управление пуском/остановом электродвигателя 15
6. Управление технологическим параметром в заданных пределах 18
7. Обработка запроса прерывания 22
Техническое задание на курсовую работу
В курсовой работе:
- осуществляется разработка и отладка программ для микропроцессорной системы управления объектом;
- разрабатывается структурная схема МКС, включая устройства ввода с дискретных датчиков (ДД), аналоговых датчиков (АД), исполнительные механизмы (ИМ), алгоритмы и программы, обеспечивающие выполнение заданных функций, осуществляется отладка разработанных программ на модели контроллера и выполняется оценка характеристик МКС: время выполнения программ и емкость памяти программ в байтах.
В данной работе решены следующие задачи:
- обработка информации, поступающей с дискретных датчиков
- обработка информации, поступающей с аналоговых датчиков
- управление пуском – остановом электродвигателя
- управление технологическим параметром в заданных пределах
- обработка запроса прерывания.
Введение
Целью курсовой работы является разработка и отладка алгоритмов и программ для реализации заданного набора функций микроконтроллерной системы управления некоторым объектом управления (ОУ), представленной на рис 1.
Микроконтроллерная система (МКС) принимает множество информационных сигналов {X} об объекте управления от аналоговых и цифровых датчиков (Д), вырабатывает множество управляющих сигналов {Y} в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). Закон управления реализуется в МКС, состоящей из микроконтроллера (МК) – управляющей микроЭВМ и пульта управления (ПУ). МК содержит основные модули, обеспечивающие выполнение и хранение данных и программ управления объектом, а также периферийные модули для подключения датчиков и исполнительных механизмов.
С помощью ПУ оператор получает возможность управлять работой МКС: запускать и останавливать ее, загружать в контроллер значения некоторых уставок (констант), выводить на индикаторы информацию о состоянии объекта и т.п.
С помощью последовательного канала связи (ПсК) МКС может передавать обработанную информацию персональному компьютеру (ПК) более высокого уровня по запросу от него, обеспечивать интерфейс в мультиконтроллерных системах (локальные сети контроллеров).
Обобщенный алгоритм функционирования МКС.
МКС реализует обобщенный алгоритм сбора и обработки данных с датчиков, представленный на рис 2.
Блок 1 выполняет начальную установку системы изагрузку в выходные каналы начальных значений управляющих воздействий и настраивает модули контроллера на выбранные режимы работы.
Блок 2 реализует задачу логического управления: принимает информацию от дискретных датчиков Х1, …, Хn, вычисляет значение булевой функцииY1= f(Х1, …, Хn) в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала (УС) Y1 по соответствующему выходному каналу контроллера на ИМ.
| | | | | | | |
| |  |
| | |  |
|
| | | |
|
| | |  |
|
| | |  |
|
|
| | Рис 2. Блок-схема обобщенного алгоритма МКС управления
| |
Блок 3 обеспечивает прием информации от аналоговых датчиков V1, …, Vm, ее преобразование в цифровую форму, вычисление значений управляющих воздействий Y2 и Y3 и выдает их на ИМ.
При этом сигналы Y2 и Y3 являются двоичными сигналами, поступающими по выбранным каналам контроллера. При выполнении этой функции оператор задает значения уставок регулируемого параметра с пульта управления (ПУ) контроллера.
Блок 4 обеспечивает циклический режим управления или останов МКС в соответствии с командой, поступающей от оператора с ПУ.
Кроме того, в системе имеется также двоичный датчик аварийной ситуации INT, поступающий в контроллер в режиме прерывания выполняемой программы. Сигнал прерывания INT от аварийного датчика включает на пульте управления аварийную световую или звуковую сигнализацию путем запуска зуммера.
Обработка информации, поступающей с дискретных датчиков (Х1, …, Хn)
Реализация логической функции: 
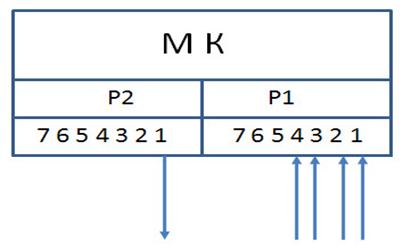
Рис 3. Упрощенная схема микроконтроллера
Внешние данные через входной порт Р1 поступают в микроконтроллер, где обрабатываются АЛУ, результатом вычисления которого является управляющее воздействие У, которое через выходной порт поступает на исполнительный механизм.
Логическая функция реализовывается посредствам способа, использующего команды условных переходов. При данном способе вычисление функции выполняется на основе разветвленного алгоритма типа дерева решений. Значения булевых аргументов последовательно анализируются командами условного перехода до тех пор, пока не определится значение функции. На рис.4 приведен алгоритм реализации функции  с использованием команд условных переходов. Анализируемые входные наборы сигналов Хi должны быть вначале загружены из входного порта в аккумулятор контроллера, а затем анализироваться последовательно, начиная с переменной X1, поступающим в нулевой разряд входного порта (см. алгоритм).
с использованием команд условных переходов. Анализируемые входные наборы сигналов Хi должны быть вначале загружены из входного порта в аккумулятор контроллера, а затем анализироваться последовательно, начиная с переменной X1, поступающим в нулевой разряд входного порта (см. алгоритм).
Анализируемые биты должны заноситься в триггер переноса C командой циклического сдвига аккумулятора RRC A (для чего исходный код должен быть предварительно загружен в аккумулятор), а затем анализироваться командами условного перехода JC или JNC. Программа выполнения данного алгоритма на языке инструкций приведена ниже.
Рис 4. Блок-схема реализации логической функции
 Таблица истинности
Таблица истинности
Программа реализации функции  на языке Ассемблер
на языке Ассемблер
1 вариант:
Соответствует моделированию реальной ситуации, для которой любой из наборов входных сигналов загружается с клавиатуры компьютера во входной порт контроллера.
$mod812
M1: mov A,p1; ввод сигналов Х3,Х2,Х1 из порта Р1 в аккумулятор МП
clr p2.7
rrc A ; сдвиг переменной Х1 во флажок переноса «С»
jnc M1; анализ значения Х1, если Х1=1, то выполняется переход к следующей
команде, иначе будет переход к метке М1
rrc A ; сдвиг переменной Х2 во флажок переноса «С»
jc M1 ; анализ значения Х2, если Х2=1, то выполняется переход к метке М1,
иначе будет переход к следующей команде
rrc A
jnc M1
setb p2.7
jmp M1; команда безусловного перехода
end ; директива конца программы для транслятора
Команды: 8
Циклы: 11
Время выполнения: 0, 000012 сек
Размер: 21 байт
2 вариант:
Предусматривает вначале формирование значения всевозможных наборов входных сигналов хранящихся в виде массива данных в резидентной памяти данных контроллера. Значения функций также формируются в отдельном массиве этой же памяти данных.
$Mod812
Mov R0,#20H; данная директива определяет адрес ПД, начиная с которого
располагается таблица истинности
Mov R1,#30H; данная директива определяет адрес, начиная с которого будет
хранится результат
Mov R2,#8H; счетчик, для подсчета количества комбинаций
CLR A
M1: Mov @R0,A; автоматическое формирование таблицы истинности
INC A
INC R0
DJNZ R2, M1
Mov R0,#20H; начальная установка регистров
Mov R2,#8H
M6: Mov A,@R0; ввод Х1,Х2,Х3 в аккумулятор
RRC A ; сдвиг переменной Х1 в флажок переноса «С»
JNC M2 ; анализ значения Х1, если Х1=1, то выполняется переход к
следующей команде, иначе будет переход к метке М2
RRC A
JC M2
RRC A
JNC M2
Mov A,#01H; установка 1 в ячейку, адрес которой расположен в регистре R1,
Mov @R1,A; для формирования сигнала Y=1
INC R1
INC R0
JMP M4
M2: Mov A,#00H; установка 0 в ячейку, адрес которой расположен в регистре R1,
Mov @R1,A; для формирования сигнала Y=0
INC R1
INC R0
M4: DJNZ R2, M6
M5: JMP M5 ; данная команда безусловного перехода имитирует останов
выполнения программы
END ; директива конца программы для транслятора
Команды: 115
Циклы: 146
Время выполнения: 0,000158 сек
Размер: 41 байт
Обработка информации, поступающей с аналоговых датчиков (V 1,…, VM)
Сигналы с аналоговых датчиков V1 и V2 преобразуются в цифровую форму в АЦП в 8-разрядные коды, представляющие целые числа без знака и поступают на обработку в МП контроллера. Величина K – 8-разрядный код, поступающий в контроллер с клавиатуры пульта управления (уставка). Полученное значение функции Nv = Nv1+ Nv2 - K сравнивается с константой Q, хранящейся в РПД и в зависимости от результатов сравнения (рис.6) МКС вырабатывает двоичные управляющие воздействия y2 или y3 длительностью t2 или t3 соответственно(см. рис 5). Для формирования требуемой длительности выходных сигналов в курсовой работе использован программный способ. Для формирования длительности импульса записан в регистр ЦПУ код, пропорциональный требуемой длительности импульсов t2 и t3.
Функция: Nv = Nv1+ Nv2 - K, t2 = 60 мкс, t3 = 40 мкс.
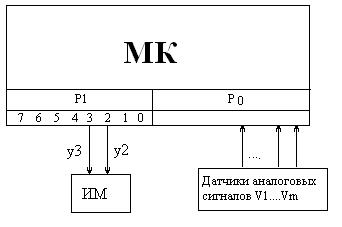
Рис 5. Обработка аналоговых сигналов
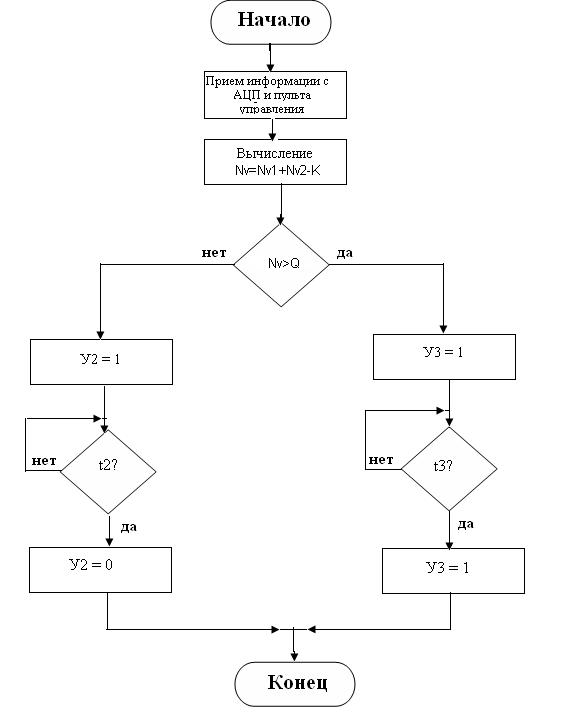
Рис 6. Алгоритм обработки аналоговых сигналов
Программа реализации функции Nv = Nv 1+ Nv 2- K на языке Ассемблер
$mod812
mov R0,#10h; данная директива помещает в регистр R0 адрес ячейки,
в которую вводится значение Nv1
mov R1,#20h; данная директива помещает в регистр R1 адрес ячейки,
в которую вводится значение Nv2
mov R4,#50h
M5: mov A,@R0; вычисляем значение Nv
add A,@R1
subb A,30h
subb A,40h; сравнение Nv и Q
jc M3 ; анализ сравнения Nv и Q, если Nv>Q, то выполняется переход к
следующей команде, иначе переход к метке М3
setb p1.3
mov R4,#5h
call delay; вызов подпрограммы
setb p1.3
jmp M4 ; команда безусловного перехода
M3: setb p1.2
mov R4,#9h
call delay
clr p1.2
M4: jmp M5
delay: djnz R4,delay
ret
end ; директива конца программы для транслятора
Карта распределения адресного пространства памяти контроллера:
30Н – значение К
40Н – значение Q
Команды: 20
Циклы: 30
Время выполнения: 0,000033 сек
Размер: 39 байт
Рис 7. Структурная схема МКС управления функцией пускателя электропривода
Датчик напряжения (Дн) выполнен на оптронном транзисторе, что обеспечивает гальваническую развязку между силовой цепью и цепями управления на вводе сигналов. Для гальванической развязки и для усиления сигнала управления двигателем на выходе используется контактор К (катушка и силовые контакты). Цепи вывода обеспечивают параметры сигнала для срабатывания контактора.
Если напряжение в силовой сети отсутствует (Дн=0), то двигатель останавливается. Если напряжение есть (Дн=1), то проверяется состояние управляющих кнопок «Ост» и «Пуск». Кнопка «Ост» имеет более высокий приоритет и поэтому проверяется раньше.
Если кнопка «Ост» нажата («Ост»=1), то двигатель останавливается, иначе переходим к проверке кнопки «Пуск».
Если кнопка «Пуск» нажата («Пуск=1»), то двигатель включается, иначе состояние двигателя не изменяется. Пуск двигателя имитируется установкой разряда D3. Блок –схема алгоритма приведена на рис.8
Программа реализации алгоритма на языке Ассемблер
$MOD812
M1: CLR A
CLR P2.6
MOV A, P1
RRC A
JNC M1 ; анализ информации с «Дн», если напряжения нет, то осуществляется
переход к метке М1, иначе будет переход к следующей команде
RRC A
JC M1 ; анализ информации с «Ост», если кнопка «Ост» нажата (Ост=1),
то осуществляется переход к метке М1, иначе переход к следующей
команде
RRC A
JNC M1 ; анализ информации с «Пуск», если кнопка «Пуск» не нажата
(Пуск=0), то осуществляется переход к метке М1, иначе переход
к следующей команде
SETB P2.6
M2: JMP M2 ; данная команда безусловного перехода имитирует останов
выполнения программы
END ; директива конца программы для транслятора
Команды: 10
Циклы: 13
Время выполнения: 0,000014 сек
Размер: 16 байт
Рис 9. Структурная схема МКС управлением параметра в пределах
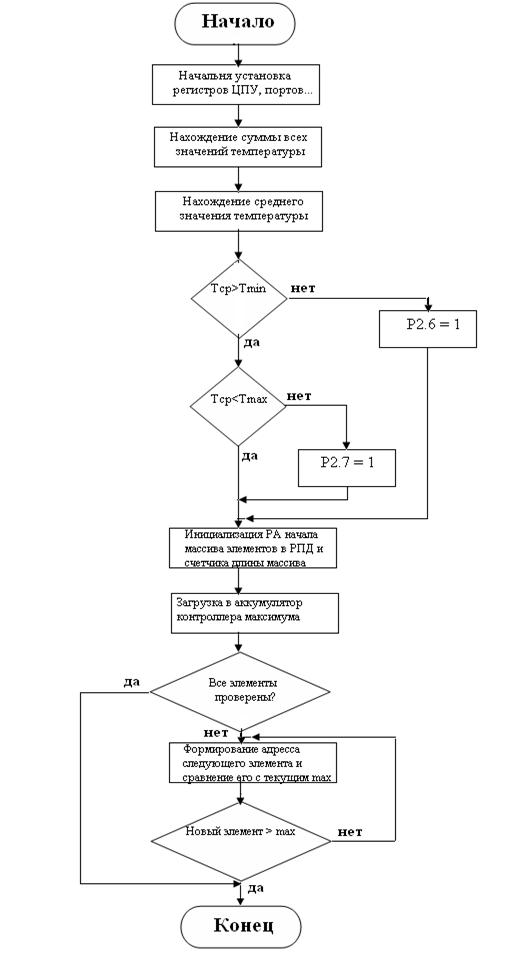
Рис 10. Алгоритм управления параметром в пределах и нахождение максимального элемента
Рис 11. Структура обработки прерывания
Санкт-Петербург
2014
Содержание
Стр.
1. Техническое задание на курсовую работу 3
2. Введение 4
3. Обработка информации, поступающей с дискретных датчиков 7
4. Обработка информации поступающей с аналоговых датчиков 12
5. Управление пуском/остановом электродвигателя 15
6. Управление технологическим параметром в заданных пределах 18
7. Обработка запроса прерывания 22
Техническое задание на курсовую работу
В курсовой работе:
- осуществляется разработка и отладка программ для микропроцессорной системы управления объектом;
- разрабатывается структурная схема МКС, включая устройства ввода с дискретных датчиков (ДД), аналоговых датчиков (АД), исполнительные механизмы (ИМ), алгоритмы и программы, обеспечивающие выполнение заданных функций, осуществляется отладка разработанных программ на модели контроллера и выполняется оценка характеристик МКС: время выполнения программ и емкость памяти программ в байтах.
В данной работе решены следующие задачи:
- обработка информации, поступающей с дискретных датчиков
- обработка информации, поступающей с аналоговых датчиков
- управление пуском – остановом электродвигателя
- управление технологическим параметром в заданных пределах
- обработка запроса прерывания.
Введение
Целью курсовой работы является разработка и отладка алгоритмов и программ для реализации заданного набора функций микроконтроллерной системы управления некоторым объектом управления (ОУ), представленной на рис 1.
Микроконтроллерная система (МКС) принимает множество информационных сигналов {X} об объекте управления от аналоговых и цифровых датчиков (Д), вырабатывает множество управляющих сигналов {Y} в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). Закон управления реализуется в МКС, состоящей из микроконтроллера (МК) – управляющей микроЭВМ и пульта управления (ПУ). МК содержит основные модули, обеспечивающие выполнение и хранение данных и программ управления объектом, а также периферийные модули для подключения датчиков и исполнительных механизмов.
С помощью ПУ оператор получает возможность управлять работой МКС: запускать и останавливать ее, загружать в контроллер значения некоторых уставок (констант), выводить на индикаторы информацию о состоянии объекта и т.п.
С помощью последовательного канала связи (ПсК) МКС может передавать обработанную информацию персональному компьютеру (ПК) более высокого уровня по запросу от него, обеспечивать интерфейс в мультиконтроллерных системах (локальные сети контроллеров).
Обобщенный алгоритм функционирования МКС.
МКС реализует обобщенный алгоритм сбора и обработки данных с датчиков, представленный на рис 2.
Блок 1 выполняет начальную установку системы изагрузку в выходные каналы начальных значений управляющих воздействий и настраивает модули контроллера на выбранные режимы работы.
Блок 2 реализует задачу логического управления: принимает информацию от дискретных датчиков Х1, …, Хn, вычисляет значение булевой функцииY1= f(Х1, …, Хn) в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала (УС) Y1 по соответствующему выходному каналу контроллера на ИМ.
| | | | | | | |
| | |
| | | |
|
| | | |
|
| | | |
|
| | | |
|
|
| | Рис 2. Блок-схема обобщенного алгоритма МКС управления
| |
Блок 3 обеспечивает прием информации от аналоговых датчиков V1, …, Vm, ее преобразование в цифровую форму, вычисление значений управляющих воздействий Y2 и Y3 и выдает их на ИМ.
При этом сигналы Y2 и Y3 являются двоичными сигналами, поступающими по выбранным каналам контроллера. При выполнении этой функции оператор задает значения уставок регулируемого параметра с пульта управления (ПУ) контроллера.
Блок 4 обеспечивает циклический режим управления или останов МКС в соответствии с командой, поступающей от оператора с ПУ.
Кроме того, в системе имеется также двоичный датчик аварийной ситуации INT, поступающий в контроллер в режиме прерывания выполняемой программы. Сигнал прерывания INT от аварийного датчика включает на пульте управления аварийную световую или звуковую сигнализацию путем запуска зуммера.
Обработка информации, поступающей с дискретных датчиков (Х1, …, Хn)
Реализация логической функции:
Рис 3. Упрощенная схема микроконтроллера
Внешние данные через входной порт Р1 поступают в микроконтроллер, где обрабатываются АЛУ, результатом вычисления которого является управляющее воздействие У, которое через выходной порт поступает на исполнительный механизм.
Логическая функция реализовывается посредствам способа, использующего команды условных переходов. При данном способе вычисление функции выполняется на основе разветвленного алгоритма типа дерева решений. Значения булевых аргументов последовательно анализируются командами условного перехода до тех пор, пока не определится значение функции. На рис.4 приведен алгоритм реализации функции с использованием команд условных переходов. Анализируемые входные наборы сигналов Хi должны быть вначале загружены из входного порта в аккумулятор контроллера, а затем анализироваться последовательно, начиная с переменной X1, поступающим в нулевой разряд входного порта (см. алгоритм).
Анализируемые биты должны заноситься в триггер переноса C командой циклического сдвига аккумулятора RRC A (для чего исходный код должен быть предварительно загружен в аккумулятор), а затем анализироваться командами условного перехода JC или JNC. Программа выполнения данного алгоритма на языке инструкций приведена ниже.
Рис 4. Блок-схема реализации логической функции
Таблица истинности
Программа реализации функции на языке Ассемблер
1 вариант:
Соответствует моделированию реальной ситуации, для которой любой из наборов входных сигналов загружается с клавиатуры компьютера во входной порт контроллера.
$mod812
M1: mov A,p1; ввод сигналов Х3,Х2,Х1 из порта Р1 в аккумулятор МП
clr p2.7
rrc A ; сдвиг переменной Х1 во флажок переноса «С»
jnc M1; анализ значения Х1, если Х1=1, то выполняется переход к следующей
команде, иначе будет переход к метке М1
rrc A ; сдвиг переменной Х2 во флажок переноса «С»
jc M1 ; анализ значения Х2, если Х2=1, то выполняется переход к метке М1,
иначе будет переход к следующей команде
rrc A
jnc M1
setb p2.7
jmp M1; команда безусловного перехода
end ; директива конца программы для транслятора
Команды: 8
Циклы: 11
Время выполнения: 0, 000012 сек
Размер: 21 байт
2 вариант:
Предусматривает вначале формирование значения всевозможных наборов входных сигналов хранящихся в виде массива данных в резидентной памяти данных контроллера. Значения функций также формируются в отдельном массиве этой же памяти данных.
$Mod812
Mov R0,#20H; данная директива определяет адрес ПД, начиная с которого
располагается таблица истинности
Mov R1,#30H; данная директива определяет адрес, начиная с которого будет
хранится результат
Mov R2,#8H; счетчик, для подсчета количества комбинаций
CLR A
M1: Mov @R0,A; автоматическое формирование таблицы истинности
INC A
INC R0
DJNZ R2, M1
Mov R0,#20H; начальная установка регистров
Mov R2,#8H
M6: Mov A,@R0; ввод Х1,Х2,Х3 в аккумулятор
RRC A ; сдвиг переменной Х1 в флажок переноса «С»
JNC M2 ; анализ значения Х1, если Х1=1, то выполняется переход к
следующей команде, иначе будет переход к метке М2
RRC A
JC M2
RRC A
JNC M2
Mov A,#01H; установка 1 в ячейку, адрес которой расположен в регистре R1,
Mov @R1,A; для формирования сигнала Y=1
INC R1
INC R0
JMP M4
M2: Mov A,#00H; установка 0 в ячейку, адрес которой расположен в регистре R1,
Mov @R1,A; для формирования сигнала Y=0
INC R1
INC R0
M4: DJNZ R2, M6
M5: JMP M5 ; данная команда безусловного перехода имитирует останов
выполнения программы
END ; директива конца программы для транслятора
Команды: 115
Циклы: 146
Время выполнения: 0,000158 сек
Размер: 41 байт
Обработка информации, поступающей с аналоговых датчиков (V 1,…, VM)
Сигналы с аналоговых датчиков V1 и V2 преобразуются в цифровую форму в АЦП в 8-разрядные коды, представляющие целые числа без знака и поступают на обработку в МП контроллера. Величина K – 8-разрядный код, поступающий в контроллер с клавиатуры пульта управления (уставка). Полученное значение функции Nv = Nv1+ Nv2 - K сравнивается с константой Q, хранящейся в РПД и в зависимости от результатов сравнения (рис.6) МКС вырабатывает двоичные управляющие воздействия y2 или y3 длительностью t2 или t3 соответственно(см. рис 5). Для формирования требуемой длительности выходных сигналов в курсовой работе использован программный способ. Для формирования длительности импульса записан в регистр ЦПУ код, пропорциональный требуемой длительности импульсов t2 и t3.
Функция: Nv = Nv1+ Nv2 - K, t2 = 60 мкс, t3 = 40 мкс.
Рис 5. Обработка аналоговых сигналов
Рис 6. Алгоритм обработки аналоговых сигналов
Программа реализации функции Nv = Nv 1+ Nv 2- K на языке Ассемблер
$mod812
mov R0,#10h; данная директива помещает в регистр R0 адрес ячейки,
в которую вводится значение Nv1
mov R1,#20h; данная директива помещает в регистр R1 адрес ячейки,
в которую вводится значение Nv2
mov R4,#50h
M5: mov A,@R0; вычисляем значение Nv
add A,@R1
subb A,30h
subb A,40h; сравнение Nv и Q
jc M3 ; анализ сравнения Nv и Q, если Nv>Q, то выполняется переход к
следующей команде, иначе переход к метке М3
setb p1.3
mov R4,#5h
call delay; вызов подпрограммы
setb p1.3
jmp M4 ; команда безусловного перехода
M3: setb p1.2
mov R4,#9h
call delay
clr p1.2
M4: jmp M5
delay: djnz R4,delay
ret
end ; директива конца программы для транслятора
Карта распределения адресного пространства памяти контроллера:
30Н – значение К
40Н – значение Q
Команды: 20
Циклы: 30
Время выполнения: 0,000033 сек
Размер: 39 байт
Управление пуском – остановом электродвигателя
На рис.7 показана упрощенная схема подключения кнопок к МКС для управления, контроля напряжения силовой сети и выдачи сигнала для включения или выключения двигателя.
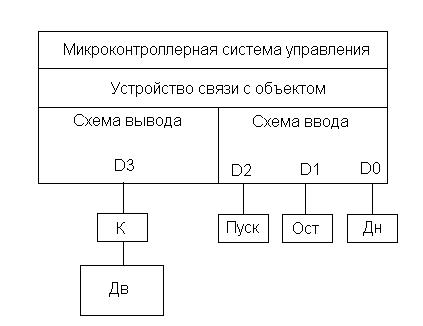
Рис 7. Структурная схема МКС управления функцией пускателя электропривода
Датчик напряжения (Дн) выполнен на оптронном транзисторе, что обеспечивает гальваническую развязку между силовой цепью и цепями управления на вводе сигналов. Для гальванической развязки и для усиления сигнала управления двигателем на выходе используется контактор К (катушка и силовые контакты). Цепи вывода обеспечивают параметры сигнала для срабатывания контактора.
Если напряжение в силовой сети отсутствует (Дн=0), то двигатель останавливается. Если напряжение есть (Дн=1), то проверяется состояние управляющих кнопок «Ост» и «Пуск». Кнопка «Ост» имеет более высокий приоритет и поэтому проверяется раньше.
Если кнопка «Ост» нажата («Ост»=1), то двигатель останавливается, иначе переходим к проверке кнопки «Пуск».
Если кнопка «Пуск» нажата («Пуск=1»), то двигатель включается, иначе состояние двигателя не изменяется. Пуск двигателя имитируется установкой разряда D3. Блок –схема алгоритма приведена на рис.8
Программа реализации алгоритма на языке Ассемблер
$MOD812
M1: CLR A
CLR P2.6
MOV A, P1
RRC A
JNC M1 ; анализ информации с «Дн», если напряжения нет, то осуществляется
переход к метке М1, иначе будет переход к следующей команде
RRC A
JC M1 ; анализ информации с «Ост», если кнопка «Ост» нажата (Ост=1),
то осуществляется переход к метке М1, иначе переход к следующей
команде
RRC A
JNC M1 ; анализ информации с «Пуск», если кнопка «Пуск» не нажата
(Пуск=0), то осуществляется переход к метке М1, иначе переход
к следующей команде
SETB P2.6
M2: JMP M2 ; данная команда безусловного перехода имитирует останов
выполнения программы
END ; директива конца программы для транслятора
Команды: 10
Циклы: 13
Время выполнения: 0,000014 сек
Размер: 16 байт