

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Топ:
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
1) Метод градиентного спуска

2) Метод Ньютона-Рафсона
Пусть необходимо найти решение системы:
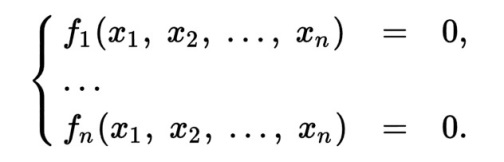
Выбирая некоторое начальное значение, последовательные приближения находят путём решения систем уравнений:

где

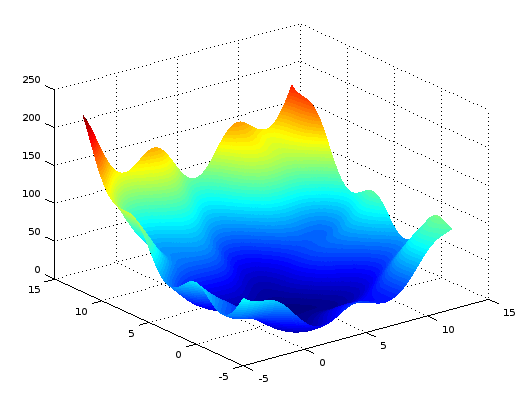
Поверхность, соответствующая функционалу системы

Решения системы уравнений тремя методами для трех точностей
| eps | Метод Ньютона-Рафсона | Метод градиентного спуска | Функция sqp |
| 1e-2 | -0.28982 1.14290 | -0.28518 1.13463 | -0.28981 1.14288 |
| 1e-3 | -0.28981 1.14288 | -0.31013 1.15186 | -0.28981 1.14288 |
| 1e-5 | -0.28981 1.14288 | -0.31448 1.15365 | -0.28981 1.14288 |
Анализ результатов решения системы и выводы по работе.
Запрограммированные методы Ньютона-Рафсона и градиентного спуска дают корректный результат.
В ходе выполнения лабораторной работы я глубже ознакомился с возможностями системы математических вычислений GNUOctave, получил дополнительный опыт программирования на языке, который используется в данной системе, а также изучил и проанализировал методы решения систем нелинейных уравнений.
Текст программы
disp("Start\n");
function y=F(x)
y = (sin(x(1))+2*x(2)-2).^2+(cos(x(2)-1)+x(1)-0.7).^2;
endfunction
y=x=[-5:0.1:5];
[xx,yy] = meshgrid(x,y);
z = (sin(xx)+2*yy-2).^2+(cos(yy-1)+xx-0.7).^2;
mesh(x,y,z);
disp("Using SQP function");
X = [0,0];
[x, obj, info, iter] = sqp (X, @F)
disp("Gradient descent");
grad_x = inline('2*(cos(x)*sin(x)+2*y-2)+x+cos(1-y)-0.7');
grad_y = inline('4*(sin(x)+2*y-2)+2*sin(1-y)*(x+cos(1-y)-0.7)');
X = [0;0];
EPS = 1e-5;
n = 0;
grad = [];
h = 0.182;
do
tmp = X;
grad(1,:) = grad_x(X(1),X(2));
grad(2,:) = grad_y(X(1),X(2));
X = X - h*grad;
n++;
until (abs(F(X)-F(tmp))<=EPS);
X
n
disp("Newton-Raphson's method");
w1 = inline('sin(x)+2*y-2');
w2 = inline('cos(y-1)+x-0.7');
J1 = inline('cos(x)');
J2 = 2;
J3 = 1;
J4 = inline('sin(1-y)');
n = 0;
X = [0;0];
do
w = [ w1(X(1),X(2)); w2(X(1),X(2))];
Jacobian = [ J1(X(1)), J2; J3, J4(X(2)) ];
delta = inv(Jacobian)*w;
|
|
X = X - delta;
n++;
until (abs(delta) <= EPS)
X
n
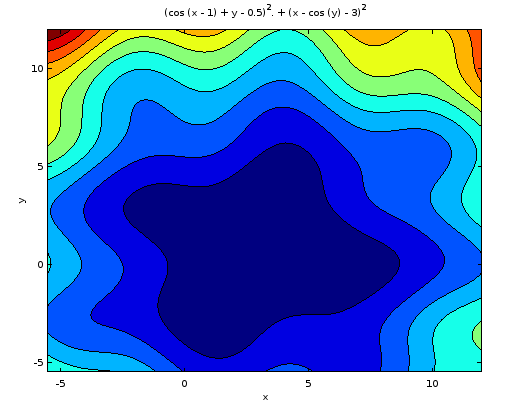
Задание и исходные данные к лабораторной работе.
F1(x,y) = cos(x-1)+y=0.5
F2(x,y) = x-cos(y)=3
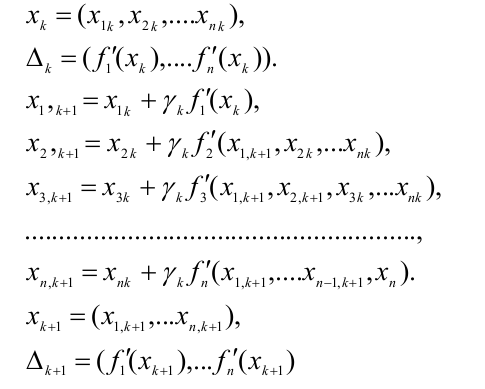
Метод наискорейшего спуска
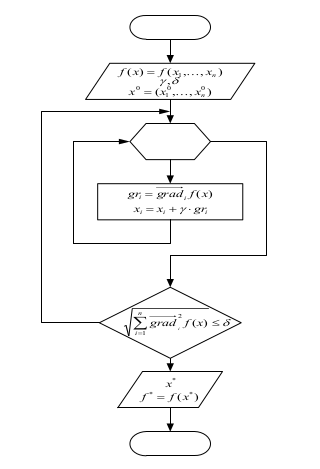
Алгоритм
На каждом шаге метод «приближается» к решению последовательно покаждой из координат. Переход от точки х к к точке х к+1 назовем внешнейитерацией. Внутри каждой «внешней» итерации находятся n внутреннихдля последовательного вычисления координат точки х к+1
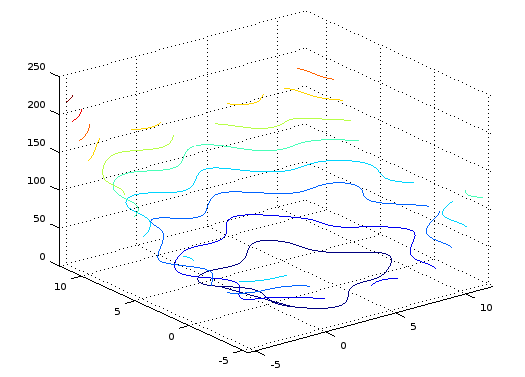
1. Поверхностьфункционаласистемы:
2. ОпределимВизуальноминимумфункционала:
x = 4;
y = 1.5;
3. Графикилинийуровняфункционала:
4. Результатырешенияразнымиметодами:
Уточнение корней:
| eps | Метод Ньютона -Рафсона | Наискорейший спуск | Функция spq |
| 1E-2 | x1 = 3.3559 y1 = 1.2069 | ans = 4 3.3562 1.2070 | x = 3.3559 1.2069 obj = 1.4379e-16 info = 101 iter = 7 |
| 1E-3 | x1 = 3.3559 y1 = 1.2069 | ans = 5 3.3559 1.2069 | x = 3.3559 1.2069 obj = 1.7616e-16 info = 101 iter = 9 |
| 1E-5 | x1 = 3.3559 y1 = 1.2069 | ans = 8 3.3559 1.2069 | x = 3.3559 1.2069 obj = 1.7423e-16 info = 101 iter = 13 |
x(0) = [4; 1.5](Наискорейший спуск и метод Ньютона-Рафсона)
начальный шаг равен 0.3.(Наискорейший спуск)
Тексты программ
%главнаяпрограмма
y=x=[-5.5:0.01:12];
[xx, yy] = meshgrid (x, y);
z=(cos(xx-1)+yy-0.5).^2.+(xx-cos(yy)-3).^2;
%mesh(x,y,z)
%x0 = [4,1.5];
%[x,obj,info,iter] = sqp(x0,@phi)
fq = @(x,y) (cos(x-1)+y-0.5).^2.+(x-cos(y)-3).^2;
%ezcontourf (fq, [-5.5, 12],200);
%contour3(x,y,z)
%функционал
function y = phi(x)
y = (cos(x(1)-1)+x(2)-0.5).^2+(x(1)-cos(x(2))-3).^2;
endfunction;
%методЗейделя-Гаусса
functionXm = GaussSeidelMin(phi, x0, d, g)
% минимизацияпокоординатнымспуском (методГаусса-Зейделя)
% Xm - координтаыминимума
% phi - функциядвухпеременных, котойищетсяминиммум
% x0 - координатыначальнойточки
% d - точность
% g - постояннаяшага
k = 1; %Счетчикшагов
kmax =500; % Предельноечислошагов,
% задаетсядляпредотвращениязацикливания
% Массивыдляхраненияпромежуточныхкоординат
x1 = x0(1);
x2 = x0(2);
x1trace = [x1];
x2trace = [x2];
i = 2;
h = 1e-5; % приращениедлярассчетаградиентов
whilek<kmax
% Спускпопервойкоординате
gr1 = (phi(x1+h,x2)-phi(x1-h,x2))/(2*h); % производнаяпох1
x1 = x1 - g*gr1;
|
|
% Сохранениекоординат
x1trace(i) = x1;
x2trace(i) = x2;
i = i + 1;
% Спускповторойкоординате
gr2 = (phi(x1,x2+h)-phi(x1,x2-h))/(2*h); % производнаяпох2
x2 = x2 - g*gr2;
% Сохранениекоординат
x1trace(i) = x1;
x2trace(i) = x2;
i = i + 1;
% Проверкаусловияостанова
ifsqrt(gr1^2 + gr2^2) <= d;
break; % Выходизциклавслучаевыполненияусловия
end
k = k + 1;
end
Xm = [x1, x2]; % координатыминимума
ifk>= kmax
disp('Минимумненайден!')
disp('Изменитезначениешага')
end
k
endfunction;
function newton = Func(x)
newton = [0; 0];
newton(1) = cos(x(1)-1)+x(2)-0.5;
newton(2) = x(1)-cos(x(2))-3;
endfunction;
GaussSeidelMin(fq, [4,1.5], 1e-2, 0.3);
cur_x = [10; 10];
Eps = 1e-5;
delta = 0;
count = 0;
do
count++;
W = [-sin(-1+cur_x(1)), 4; 1.5, sin(cur_x(2))];
B = (-1)*Func(cur_x);
delta = inv(W)*B;
cur_x += delta;
until (max(abs(delta)) <Eps || count > 1000);
disp('МетодНьютона-Рафсона')
x
y
count
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!