

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе РЛС равно
qП = Е / Nд×0,17×l2 = 5,6 / 392×1.53 = 0,01.
За счет применения фильтра ЧПК qП увеличится приблизительно на 40 дБ (в 100 раз) и составит qПП ’=1. Вероятность правильного обнаружения
 =
=  =0,316.
=0,316.
Применение уводящих по дальности помех с высокой вероятностью будет приводить к захвату ложной цели.
При воздействии пассивной помехи вероятность пропуска цели составит
`D = 1-D1 = 1-0,316 = 0,684,
а также будет осуществляться перенацеливание на ложный объект.
На рис. 14 представлен результат действия пассивных помех, а именно приведен график зависимости максимальной дальности обнаружения РЛС от ЭПР пассивной помехи, если на РЛС нет устройства подавления ПП (нет режекторных гребенчатых фильтров).

Рис. 14
На рис. 15 приведен график зависимости максимальной дальности обнаружения РЛС от ЭПР пассивной помехи при использовании РФ. Сравнив зависимости на рис. 14 и рис. 15 можно увидеть корректирующее действие РФ, т.е. увеличение дальности обнаружения при использовании РФ.
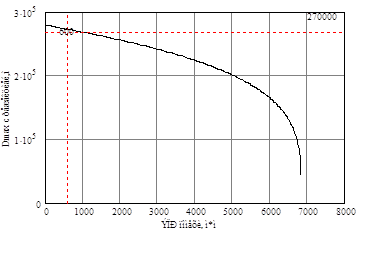
Рис. 15
6. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
антенна пассивный помеха параметр
Анализ структурных схем и алгоритмов работы постановщиков помех позволяет сделать вывод о необходимости использования при проектировании таких систем достаточно сложных в изготовлении и настройке элементов и функциональных устройств. К их числу можно отнести устройства мгновенного измерения частоты; высокостабильные генераторы с электронным управлением, используемые как возбудители передатчиков помех и обеспечивающие перестройку по частоте за очень короткие интервалы времени (порядка наносекунд); широкополосные высокочастотные компоненты: ЛБВ и ЛОВ, малошумящие усилители СВЧ, ВЧ-фильтры, быстродействующие переключатели; цифровую высокочастотную память, необходимую для хранения ЗС РЛС и их воспроизведения при постановке УП; сверхбольшие интегральные схемы (СБИС) для организации управления отдельными узлами и системами помехопостановщика. В связи с возможностью размещения постановщиков помех на подвижном носителе (обычно ЛА), перечисленные компоненты должны удовлетворять следующим противоречивым требованиям: иметь минимальные энергопотребление, массу и габариты, хорошую электромагнитную совместимость (ЭМС), сохранять работоспособность при воздействии вибрации и резких изменениях микроклиматических параметров, обладать высокой надежностью.
|
|
Основное требование к программным ресурсам конфликтующих сторон – высокая производительность и темп обработки.
Определим темп для обработки данных в реальном масштабе времени:
Число каналов по дальности m1 = Tп/τи = 1820. 10-6 /8. 10-7 = 2275
Число каналов по азимуту m2 = ΔΩ/θ0 = 60/1 = 60
Общее количество каналов M = m1. m2 = 136500
Тогда темп обработки данных составит 170 ГГц.
Быстродействие АЦП определяется затратами времени на преобразование, которые должны быть меньше длительности временного дискрета. В настоящее время используются АЦП с быстродействием, характеризующимся частотой дискретизации <100 МГц, например, АЦП АD 6644 фирмы AnalogDevice (США) имеет 65 МГц при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала 39 МГц. Если быстродействия АЦП недостаточно для преобразования сигналов промежуточной частоты, то переходят к ЦОДЦ и ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которые включены два АЦП.
|
|
|

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!