

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Санкт-Петербургский государственный архитектурно-строительный университет».
Кафедра: «Наземные транспортно-технологические машины».
Дисциплина: «Теория механизмов и машин».
Пояснительная записка к курсовому проекту:
«Кинетическое и динамическое исследование
Кривошипно - шатунною механизма компрессора
Простого действия».
Работу выполнил:
Студент: Яровой Олег Александрович
Группа: ИБФО 2-ЭТМКЗ-2
Номер зачётной книжки: 18100511
Работу проверил:
________________________
Санкт-Петербург
2020
Структурный анализ рычажного механизма
Задачами структурного анализа исследуемого рычажного механизмаявляются:
- построение структурной схемы механизма;
- определение степени подвижностимеханизма;
- разбивка кинематической цепи механизма на структурныегруппы;
- определение формулы строениямеханизма.
Построение структурной схемымеханизма
Структурная схема механизма представлена на рисунке1.1.
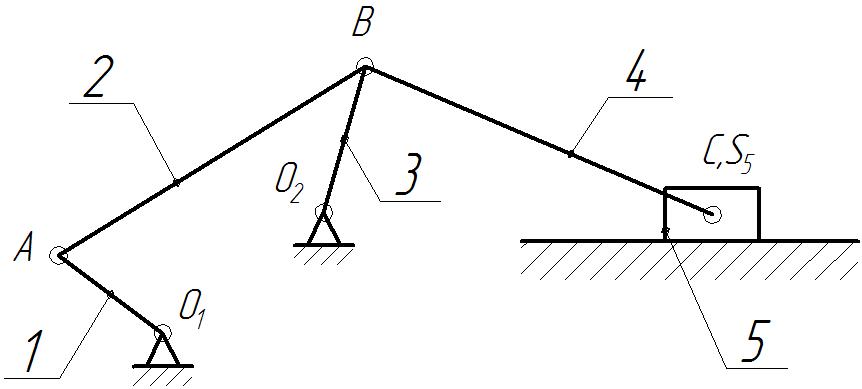
Рисунок 1.1 – Структурная схема рычажногомеханизма
Механизмсостоитизшестизвеньев.Примемследующиеусловныеобозначениязвеньев механизма:0–стойка;1–кривошип;2–шатун;3–коромысло;4–шатун;5–ползун. Стойка 0– неподвижное звено. Таким образом,количество подвижных звеньев равно5-ти.
Звенья механизма соединены между собой кинематическими парами. Все пары низшие (вращательные и поступательные), плоские.
Обозначим кинематические пары: 1) стойка 0образуетскривошипом1вращательнуюпаруО;2)кривошип1с шатуном2–вращательную паруА;3)шатун2с коромыслом3-вращательнуюпаруB;4)коромысло3состойкой0– вращательную пару О2; 5) коромысло 3 с шатуном 4 – вращательную пару B; 6) шатун 4 с ползуном 5– вращательную пару С; 7) ползун 5 со стойкой 0 – поступательную пару С5. Таким образом, количествонизшихпар(парпятогокласса)7.Высшиепары(парычетвертогокласса)отсутствуют.
|
|
Определение степени подвижностимеханизма
Степень подвижности механизма определяем по формуле Чебышева П.Л. для плоскихмеханизмов
W = 3n – 2p5− p4= 3n – 2pн−pв,(1.1)
где n - число подвижныхзвеньев;
pн- число низших кинематических пар (пятогокласса);
pв- число высших кинематических пар (четвертогокласса).
Для исследуемого механизма степеньподвижности
W = 3 ∙ 5 − 2 ∙ 7 − 0 = 1.
Ф ормуластроениямеханизма
Формуластроениямеханизма имеет вид
I→II1→II2.
Такимобразом,исследуемыймеханизмII-гокласса.
Кинетостатический анализ рычажногомеханизма
При силовом расчете механизма используется метод кинетостатики, основанныйна принципе Д’Аламбера. В соответствии с указанным принципом, в дополнение ковсем действующим на механизм внешним силам, необходимо приложить силы и моменты силинерции звеньев, чтобы привести механизм в состояние равновесия. После приведения механизмав равновесие для расчетов применяются уравнениястатики.
Задачами кинетостатического анализаявляются:
-определение сил инерции звеньев и точек их приложения, моментов сил инерциизвеньев;
- определение весов звеньевмеханизма;
- определение уравновешивающейсилы.
Для определения уравновешивающей силы будем использовать метод планов силН.Г. Бруевича и метод «жесткого рычага» Н.ЕЖуковского.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Артоболевский, И.И. Теория механизмов и машин: Учебник для вузов. – М.: Наука, 1975. – 640 с.
2 Дьячков, В.К. Машины непрерывного транспорта. Учебное пособие. – М.: МАШГИЗ, 1961. – 352 с.
3 Спиваковский, А.О. Транспортирующие машины: Учебник для вузов / В.К. Дьячков. – М.: Машиностроение, 1968. – 504 с.
|
|
4 Кореняко, А.С. Курсовое проектирование по теории механизмов машин. 1970. – 347 с.
5 Тимофеев, Г.А. Теория механизмов и машин 2-е изд., пер. и доп. Учебное пособие для бакалавров. 2012. – 351 с.
6 Белоконев, И.М. Теория механизмов и машин, 1989. – 370 с.
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Санкт-Петербургский государственный архитектурно-строительный университет».
Кафедра: «Наземные транспортно-технологические машины».
Дисциплина: «Теория механизмов и машин».
Пояснительная записка к курсовому проекту:
«Кинетическое и динамическое исследование
кривошипно - шатунною механизма компрессора
Простого действия».
Работу выполнил:
Студент: Яровой Олег Александрович
Группа: ИБФО 2-ЭТМКЗ-2
Номер зачётной книжки: 18100511
Работу проверил:
________________________
Санкт-Петербург
2020
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!