

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
3 I22 r2 = M ·ω0 s
Ориентировочно можно считать, что потери в обмотках статора относятся к потерям в обмотках ротора в соотношении r1 / r2. Тогда переменные потери для асинхронных двигателей будут
 (11.3)
(11.3)
Мы видим, что при работе с неполной нагрузкой кпд двигателя снижается.
Типичная кривая зависимости кпд от загрузки двигателя показана на рис. 11.1.
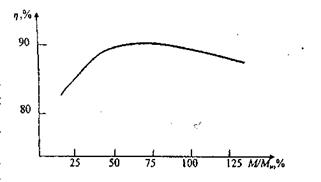
Рис. 11.1. Зависимость кпд асинхронного двигателя от нагрузки (двигатель 4АИ16084)
Отсюда следует, что завышение установленной мощности двигателя ведет к снижению его эксплуатационного кпд, т.е. к непроизводительному расходу электроэнергии.
Кпд преобразовательного устройства, если последнее выполнено на базе силовых на базе силовых полупроводниковых приборов, довольно велико. Потери в преобразователе определяются, главным образом, величиной прямого падения напряжения в полупроводниковом приборе. В среднем можно считать, что Δ U = 2В, для мостовых схем – 4,0В. Таким образом, номинальные потери для преобразователей напряжением 440В составляют 1%, а для преобразователей напряжением 220В – 2%. С учетом потерь в реактивных элементах полупроводниковых преобразователей можно полагать, что их кпд составляет 0,95-0,98.
Потери в механическом передаточном устройстве: редукторе, трансмиссии и др., определяются главным образом, силами трения. Величина этих потерь, а, следовательно, кпд механической передачи зависит от типа используемых подшипников, класса обработки зубчатых колес, систем смазки и др. Кпд механической передачи не остается постоянным, а существенно зависит от величины передаваемого момента.
|
|
Под кпд рабочей машины понимают произведение кпд электропривода ηэп на кпд собственно рабочей машины. Так, для вентиляторной установки
 (11.4)
(11.4)
Здесь Q – производительность вентилятора, м /с;
Н – напор, Па;
ηвен – аэродинамический кпд вентилятора;
Рзатр – затраченная электрическая мощность.
Если рабочая машина работает в энергетически постоянном режиме, то ее энергоемкость, выражаемая через кпд, определяется по (11.4). Если рабочая машина работает циклически (например, лифты, грузоподъемные механизмы, продольно-строгальные станки и многие другие), то более правильно кпд рабочей машины
определять по затратам энергии за цикл работы
 (11.5)
(11.5)
где 
–соответственно полезная работа за цикл, затраченная энергия за цикл, потери энергии за рабочий цикл.
В сети переменного тока, питающей электропривод, циркулирует реактивная мощность. Негативным результатом наличия реактивной мощности является загрузка питающей сети реактивным током, не создающим работы. Величина реактивной мощности оценивается величиной cosφ, где под углом φ понимается фаза сдвига первой гармоники тока от первой гармоники напряжения. У асинхронных короткозамкнутых двигателей номинальный cosφ составляет примерно 0,7-0,8. Недогрузка асинхронного двигателя ведет к дальнейшему снижению cosφ.
Cosφ эп= Cosφ эд· Cosφ пр
В приводах по системе ТП-Д (см. раздел 5.3) cosφ = cosа, что определяется запаздыванием, устанавливаемым системой импульсно-фазового управления, открывания тиристоров. Поэтому в приводах ТП-Д при высокой скорости вращения cosφ в питающей сети переменного тока будет высоким (0,8-0,9), по мере снижения скорости, когда угол а растет, cosφ будет уменьшаться. При включении привода ТП-Д имеют место броски реактивной мощности.
|
|
В современных системах регулируемого электропривода стремятся использовать неуправляемые выпрямители, осуществляя регулирование величины напряжения, подаваемого к обмоткам двигателя, широтно-импульсными методами (см. например, схемы рис.5.29. 6.12). В этом случае cosφ в питающей сети будет не ниже 0,95.
С точки зрения компенсации реактивной мощности многих потребителей электроэнергии эффективно использование для нерегулируемых электроприводов синхронных двигателей большой мощности, которые при перевозбуждении способны генерировать реактивную мощность для ее компенсации в пределах энергосистемы данного
|
|
|
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!