Структурная схема стабилизации вала гидромотора представлена на рисунке 2.1.
Система управления МГС состоит:
1. ЭБУ;
Таблица 2.1 – Технические характеристики насоса «Пневмостроймашина» 411.K.107 (аналог A2FO107)
| Наименование параметра
| Параметр, ед. изм.
| Величина.
|
| Рабочий объем
| 
| 
|
| Минимальная частота вращения
| 
| 6,67
|
| Номинальная частота вращения
| 
| 20
|
| Номинальная подача
| 
| 
|
| Номинальное давление нагнетания
| 
| 
|
| Номинальная потребляемая мощность
| 
| 
|
| КПД
| 
| 0,91
|
| Масса
| 
| 18
|
Таблица 2.2 – Характеристики гидромотора «Пневмостроймашина 303.4.12
| Наименование параметра
| Параметр, ед. изм.
| Величина.
|
| Рабочий объем минимальный
| 
| 
|
| Рабочий объем максимальный
| 
| 
|
| Минимальная частота вращения
| 
| 0,83
|
| Номинальная частота вращения
| 
| 40
|
| Номинальный расход
| 
| 
|
| Номинальное давление навходе
| 
| 
|
| Номинальная мощность
| 
| 
|
| КПД
|
| 0,9
|
| Масса
| 
| 6
|
2. Гидромотор;
3. Датчик температуры;
4. Датчик отслеживающий угловую скорость вала того, на котором требуется ее стабилизация (в данном случае – генератор).
Система управления МГС работает по следующему алгоритму:
 1. Прием ЭБУ (1) входящих сигналов (сопряжение) внешних датчиков, несущих в себе информацию о состоянии системы (3),(4);
1. Прием ЭБУ (1) входящих сигналов (сопряжение) внешних датчиков, несущих в себе информацию о состоянии системы (3),(4);
2. Анализ и обработка полученной информации ЭБУ(1), на основе программы управления системой;
 3. Формирование выходного сигнала управления (сопряжение).
3. Формирование выходного сигнала управления (сопряжение).
Согласно данному алгоритму работы ЭБУ будет управлять рабочим объемом гидромотора (2) пропорционально изменению угловой скорости генератора. От завода изготовителя, генератор или гидромотор могут комплектоваться необходимым датчиком частоты вращения (4), поэтому сложность в считывании угловой скорости выходного звена для ЭБУ отпадает.
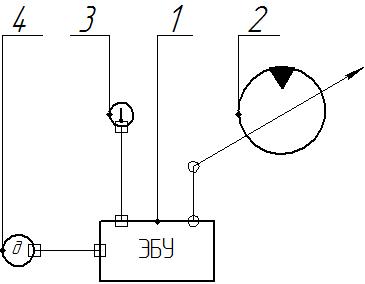
Рисунок 2.1 – Схема системы управления МГС. Стабилизация угловой скорости вала выходного звена
В соответствии со структурной схемой ЭСУГ для МГС (см. рис. 2.1) и блок схему ЭБУ для ЭСУД (см. рис. 1.22) составим блок-схему ЭБУ для ЭСУГ (см. рис. 2.2).
Для осуществления стабилизации угловой скорости вала выходного звена ЭБУ должен решать следующую задачу:
Программа управления должна быть создана для того, чтобы обеспечивать постоянную угловую скорость вала выходного звена ( ) путем пропорционального изменения рабочего объема (
) путем пропорционального изменения рабочего объема ( )гидромотора, вне зависимости от изменения угловой скорости приводного вала
)гидромотора, вне зависимости от изменения угловой скорости приводного вала  . В этом случае будет уместна параметрическая программа управления известная из
. В этом случае будет уместна параметрическая программа управления известная из  :
:
 (2.6)
(2.6)
где  – требуемое значение управляемой величины;
– требуемое значение управляемой величины;
 – какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления.
– какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления.
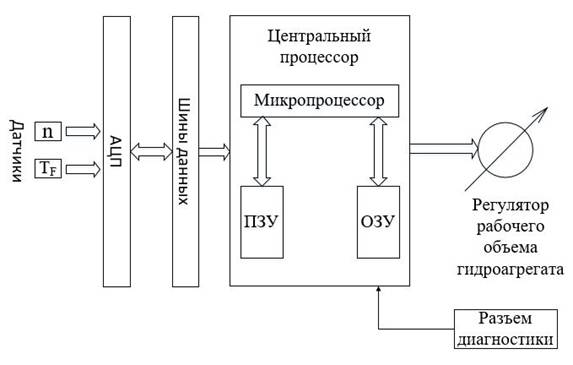
n – частота вращения вторичного вала;
TF – Температура рабочей жидкости, 
Рисунок 2.2 – Блок-схема ЭБУ для ЭСУГ
Оригинальный алгоритм программы зарегистрирован свидетельством о государственной регистрации программы для ЭВМ № 2015614393 (см. приложение Б).
Главный критерий регулирования обусловлен тем, что допустимое и предельно допустимое отклонение от требуемой частоты тока, вырабатываемого генератором  , согласно
, согласно  составляет соответственно
составляет соответственно  0,2 Гц и 0,4 Гц.
0,2 Гц и 0,4 Гц.
Из мы знаем что,
 (2.7)
(2.7)
где  – число пар полюсов;
– число пар полюсов;
Оттуда же, известна таблица 2.3.1, при  :
:
Таблица 2.3 – Зависимость частот вращения магнитного поля от числа пар полюсов
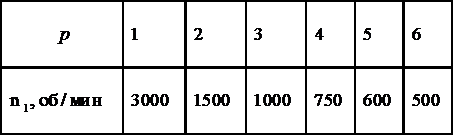
Таким образом, можно посчитать крайние условия регулирования для двухполюсной машины, где  мин-1 по формуле (2.7)
мин-1 по формуле (2.7)
 мин-1; (2.8)
мин-1; (2.8)
 мин-1; (2.9)
мин-1; (2.9)
Или
 рад/с; (2.10)
рад/с; (2.10)
 рад/с. (2.11)
рад/с. (2.11)
Начальное значение величин  ,
,  определяется согласно параметрамустановки в соответствии с
определяется согласно параметрамустановки в соответствии с
Расчет гидросистемы «МГС»
3.1 СвободнопоточнаямикроГЭС
Таблица 3.1 – Исходные данные МГС для свободнопоточноймикроГЭС.
| Наименование параметра
| Параметр, ед.изм
| Величина
|
| Расчетное номинальное давление в гидросистеме
|  , МПа , МПа
| 25
|
| Длина всасывающего трубопровода
|  , м , м
| 3
|
| Длина напорного трубопровода
|  , м , м
| 3
|
| Длина сливного трубопровода
| , м
| 1
|
| Коэффициент местных сопротивлений во всасывающем трубопроводе
| 
| 1
|
| Коэффициент местных сопротивлений в напорном трубопроводе
| 
| 1
|
| Коэффициент местных сопротивлений в сливном трубопроводе
| 
| 3
|
| Скорость реки «Сисим», Красноярский край, Березовский район, пос. Березовка
|  , м/с , м/с
| 2
|
| Коэффициент использования энергии потока (КПД турбины)
| 
| 0,4
|
| Диаметр рабочего колеса
|  , м , м
| 1
|
| Длина рабочего колеса
|  , м , м
| 2
|
| Плотность воды
|  , , 
| 1000
|
| Общий КПД гидронасоса
|
| 0,9
|
| Объемный КПД насоса
| 
| 0,95
|
| Общий КПД гидромотора
| 
| 0,9
|
| Механический КПД гидромотора
| 
| 0,95
|
| Общий КПД генератора
| 
| 0,8
|
| Коэффициент быстроходности рабочего колеса
| 
| 2,25
|
| Тип рабочего колеса
| Ортогональное
|
|





