Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
1. Материальная точка – это твёрдое тело, размерами которого в данной задаче можно пренебречь.
X
Y
Z
Радиус-вектор – это вектор, определяющий положение материальной точки в любой момент времени в заданной системе отсчёта (рис.1)
Рис. 1 – Радиус-вектор
где единичные векторы направлений; x, y, z – координаты точек.
2. Основная задача кинематики поступательного движения заключается в нахождении явного вида функции
3.Вектор средней скорости материальной точки
,
где – перемещение материальной точки за интервал времени .
Модуль средней скорости
.
4. Средняя путевая скорость или средняя скорость на всем пути (скалярная величина)
,
где – путь, пройденный точкой за время .
5. Вектор мгновенной скорости материальной точки
.
- вектор, определяемый производной радиуса-вектора движущейся точки по времени и направленный по касательной к рассматриваемой точке траектории в сторону движения.
Модуль мгновенной скорости
Вектор можно разложить на составляющие, направленные вдоль координатных осей
,
где ; ; – проекции вектора скорости на координатные оси.
Модуль мгновенной скорости через проекции
.
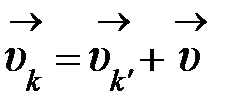
6. Закон сложения скоростей
,
где - скорость точки в системе K; - скорость этой точки в системе K ’; - скорость системы K ’ относительно системы K.
Относительная скорость двух тел
и ,
где - относительная скорость первого тела относительно второго; - относительная скорость второго тела относительно первого.
7. Вектор среднего ускорения материальной точки
,
где – изменение вектора скорости за интервал времени
8. Вектор мгновенного ускорения материальной точки
Направление вектора совпадает с направлением вектора d (приращением вектора скорости за время d t)
Вектор можно разложить на составляющие, направленные вдоль координатных осей
где – проекции вектора ускорения на оси координат.
Модуль мгновенного ускорения через проекции
9. В случае криволинейного движения ускорение равно геометрической сумме тангенциальной и нормальной составляющих (рис.2).
,
Рис. 2 – Полное линейное ускорение
где , определяет изменение вектора скорости по направлению; , определяет изменение вектора скорости по величине.
Модули этих ускорений
; ; ,
где R – радиус кривизны траектории; – производная модуля скорости по времени.
10. Основная задача кинематики вращательного движения заключается в нахождении явного вида функции ,
где – угловое перемещение материальной точки, модуль которого равен углу поворота.
11. Вектор средней угловой скорости
где – приращение угла поворота за промежуток времени .
12. Вектор мгновенной угловой скорости
R
z
Направление векторов и ( и – псевдовектора, направленные вдоль оси вращения) определяют по правилу правого винта (рис. 3).
Рис. 3 – Кинематические характеристики вращательного движения
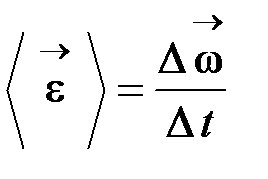
13. Вектор среднего углового ускорения
.
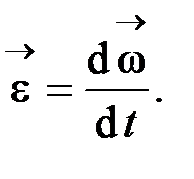
14. Вектор мгновенного углового ускорения
15. Связь между линейными и угловыми величинами:
путь, пройденный точкой
,
где R – радиус окружности, по которой движется точка;
скорость точки
;
тангенциальная составляющая ускорения точки
;
нормальная составляющая ускорения точки
.
16. Период вращения T равномерно вращающейся точки () – это время, за которое точка совершает один оборот, то есть поворачивается на угол радиан
или .
17. Частота вращения n – число полных оборотов в единицу времени
.
Тогда угловая скорость точки связана с частотой вращения соотношением .
Таблица 1
Основные уравнения кинематики поступательного и вращательного движений
Движение
Поступательное
Вращательное
равномерное
;
а)
где – радиус-вектор, определяющий положение материальной точки в момент времени t;
– радиус-вектор, определяющий положение материальной точки в момент времени t = 0.
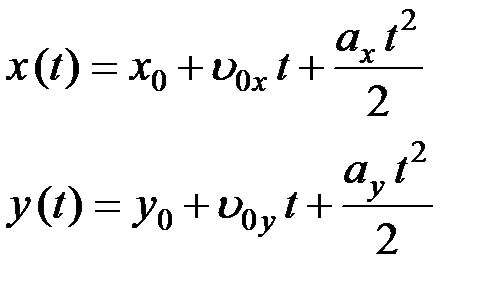
б) в координатной форме
.
;
а)
где – начальное угловое перемещение.
б) в проекции на ось вращения Z
.
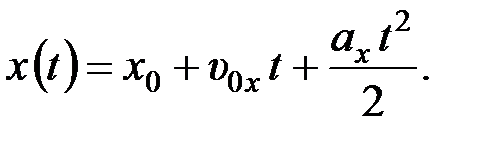
равнопеременное
а)
где – начальная скорость.
б)в координатной форме
.
в) .
г) в координатной форме
а)
где – начальная угловая скорость.
б) в проекции на ось вращения Z.
Примеры решения задач
Пример 1. Движение материальной точки задано уравнением , где А= 4 м/с ,В = – 0,05 м/с2. Определить момент времени, в который скорость u точки равна нулю. Найти координату и ускорение точки в этот момент времени.
Дано:; м/с; – 0,05 м/с2.
Найти: 1) t; 2) x; 3) a.
Решение. Материальная точка совершает одномерное прямолинейное движение вдоль оси x, уравнение которого имеет вид
Мгновенная скорость материальной точки – есть первая производная от координаты по времени
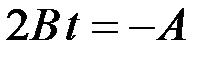
Определим момент времени t, в который скорость точки равна нулю:
;
;
;
.
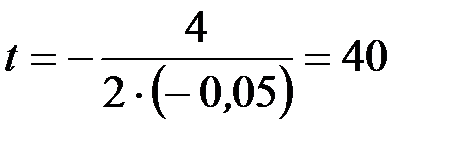
Подставим числовые значения и выполним вычисления
с.
Определим координату в момент времени t = 40 c:
м.
Мгновенное ускорение материальной точки – есть первая производная от проекции скорости на ось x по времени
Выполним вычисления:
– 0,1 м/с2.
Ответ:t = 40 c; x = 80 м; а = – 0,1 м/с2.
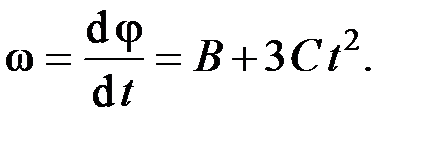
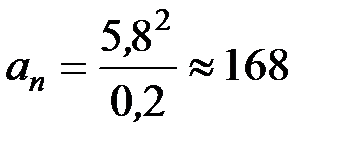
Пример 2. Диск радиусом R = 20 см вращается согласно уравнению где ; ; . Определить тангенциальное , нормальное и полное а ускорения точек на окружности диска для момента времени с.
Дано:; ; ; ; см = 0,2 м; с.
Найти:
Решение. В задаче дано уравнение движения диска в проекции на ось вращения
Возьмем производную от угла поворота по времени и найдем угловую скорость диска
Возьмем производную от угловой скорости по времени и найдем угловое ускорение диска
.
Связь между линейной и угловой скоростями определяется соотношением
u = w R
Тогда линейная скорость диска
u = (B +3 Ct2) R
Выполним вычисления для момента времени с:
u = (– 1+3·0,1·102)·0,2 = 5,8 м/с.
Связь между тангенциальным и угловым e ускорениями
.
Тогда
Выполним вычисления для момента времени с:
at= 6 × 0,1× 0,2 × 10 = 1,2 м/с2.
Модуль нормальной составляющей ускорения
.
Произведем вычисления :
м/с2.
Модуль полного ускорения a
Выполним вычисления а:
м/с2.
Ответ: м/с2; м/с2; м/с2.
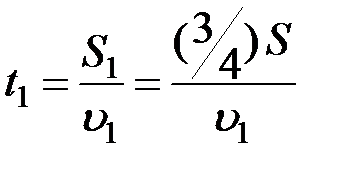
Пример 3. Три четверти своего пути автомобиль прошёл со скоростью , остальную часть пути – со скоростью . Определить среднюю путевую скорость автомобиля?
Дано:u1= 60 км/ч; u2 = 80 км/ч.
Найти:.
Решение. Средняя путевая скорость тела равна отношению пути к тому промежутку времени, за которое пройден этот путь
.
Весь путь движения автомобиля S целесообразно разделить на два участка и .
Время движения автомобиля на первом участке равно
, (1)
а на втором участке –
. (2) Тогда средняя путевая скорость равна
. (3)
Подставив выражения (1) и (2) в формулу (3), получаем
.
Подставим числовые значения и выполним вычисления:
км/ч.
Ответ: = 64 км/ч.
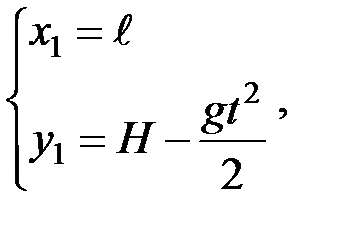
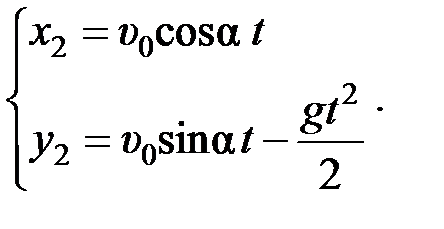
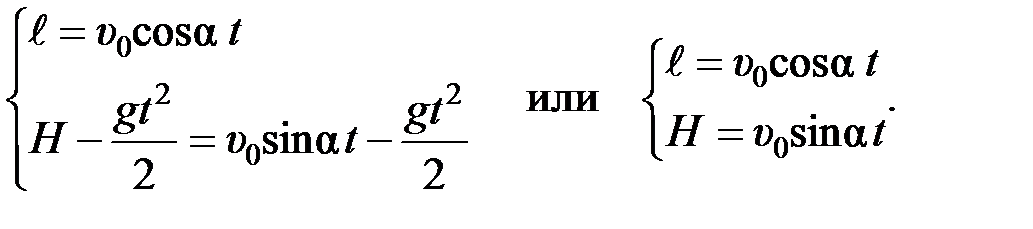
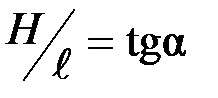
Пример 4.Под каким углом к горизонту охотник должен направить ствол ружья, чтобы попасть в птицу, сидящую на высоте H на дереве, находящемся на расстоянии l от охотника? В момент выстрела птица свободно падает вниз на землю.
Дано:H; l.
Найти: a.
Решение.
l
A
X
H
Y
α
0
Сделаем рисунок согласно условию задачи (рис.4)
Рис. 4 – Траектория движения
Запишем уравнения движения:
- свободно падающей птицы
- пули, выпущенной под углом α к горизонту с начальной скоростью u0
В момент попадания пули в птицу их координаты равны, тогда
Тогда
.
Искомый угол равен
Динамика
Основные законы и формулы
1. Импульс материальной точки массой m, движущейся со скоростью
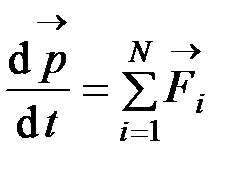
2. Основное уравнение динамики поступательного движения (второй закон Ньютона)
,
где – геометрическая сумма сил, действующих на материальную точку; N – число сил, действующих на точку; – производная от импульса материальной точки по времени.
При m = const(масса не зависит от скорости) второй закон Ньютона имеет вид
или ,
где – вектор ускорения.
3. Основное уравнение динамики в проекциях на касательную и нормаль к траектории точки
, .
4. Виды сил.
· сила гравитационного взаимодействия материальных точек массами и , находящихся на расстоянии r друг от друга
где G – гравитационная постоянная.
Это соотношение справедливо и для тел сферической формы значительно удалённых друг от друга (r – расстояние между центрами этих тел).
· сила тяжести
,
где – ускорение свободного падения.
· сила упругости
,
где – радиус-вектор, определяющий смещение частицы от положения равновесия. Примером такой силы является сила упругой деформации при растяжении (сжатии) пружины или стержня. В соответствии с законом Гука
,
где k – коэффициент упругости; x – величина упругой деформации.
· сила трения скольжения
,
где – коэффициент трения скольжения; N – сила нормального давления.
5. Работа, совершаемая переменной силой на участке траектории L
,
где интегрирование ведётся вдоль траектории L; – элементарный путь.
6. Работа, совершаемая постоянной силой ( cosa = const)
,
где – угол между направлениями векторов силы и скорости
При решении задач следует точно представлять, какая сила F совершает работу, и указывать это в пояснениях к решению.
7. Мгновенная мощность в поступательном движении, или мощность развиваемая силой F в данный момент времени
или
где – угол между векторами силы и скорости
Работа и мощность являются скалярными величинами.
Механическая энергия системы Е имеет две составляющих, кинетическую (энергию движения) и потенциальную (энергию взаимодействия и взаиморасположения частей механической системы).
Е=Ек+Еп.
В замкнутой системе, в которой действуют только консервативные силы, механическая энергия сохраняется. В этом суть закона сохранения энергии в механике.
8. Кинетическая энергия материальной точки, движущейся со скоростью , пренебрежимо малой по сравнению со скоростью света с:
или
9. Потенциальная энергия материальной точки, находящейся в однородном поле силы тяжести ( = const):
,
где h – высота материальной точки над уровнем, принятым занулевой для отсчета потенциальной энергии; g – ускорение свободного падения.
Данная формула применима и для расчета потенциальной энергии протяженных тел, в этом случае h – высота центра масс тела над уровнем, принятым за нулевой для отсчета потенциальной энергии.
10. Потенциальная энергия упруго деформированного тела (сжатой или растянутой пружины)
11. Закон сохранения импульса замкнутой системы – импульс замкнутой системы частиц не меняется со временем, т.е. остается постоянным.
или
где N – число материальных точек, входящих в систему.
12. Момент инерции относительно неподвижной оси вращения:
материальной точки
где mi – масса материальной точки; ri – расстояние от неё до оси вращения;
системы материальных точек
где – масса i -ойматериальной точки; – расстояние от этой точки до оси вращения;
твердого тела
,
где d m и d V – масса и объём элемента тела, находящегося на расстоянии r от оси Z; – плотность тела в данной точке.
16. Теорема Штейнера: момент инерции тела относительно произвольной оси
,
где – момент инерции тела относительно оси, параллельной данной и проходящей через центр масс; m – масса тела; a – расстояние между произвольной осью и параллельной осью, проходящей через центр масс тела.
Таблица 2
Моменты инерции некоторых однородных тел правильной геометрической формы относительно их геометрических осей вращения
Тело
Ось, относительно которой
определяется момент
инерции
Формула
момента
инерции
однородный тонкий стержень массой m и длиной l
Ось проходит через середину стержня перпендикулярно ему
тонкое кольцо, труба радиусом R и массой m
Ось симметрии
сплошной однородный диск (цилиндр) радиусом R и массой m
Ось симметрии
однородный шар массой m и радиусом R
Ось проходит через центр шара
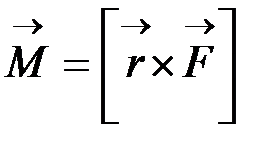
17. Момент силы относительно точки О равен векторному произведению векторов и
,
где – радиус-вектор, проведённый из точки О в точку приложения силы (рис. 5).
О
А
d
Модуль момента силы
,
где d – плечо силы (величина, равная кратчайшему расстоянию от точки О до линии действия силы).Рис. 5 – Момент силы
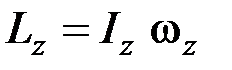
18. Момент импульса твердого тела относительно неподвижной оси Z
,
где – момент инерции твёрдого тела относительно неподвижной оси Z; – проекция угловой скорости твёрдого тела на ось Z.
19. Уравнение динамики вращательного движения твердого тела относительно неподвижной точки О
,
где – момент импульса твёрдого тела; – результирующий момент внешних сил.
В проекции на ось Z
,
где – момент инерции твёрдого тела относительно неподвижной оси Z; – проекция углового ускорения твёрдого тела на ось Z.
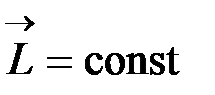
20. Закон сохранения момента импульса для замкнутой системы, когда результирующий момент внешних сил равен нулю ():
или проекция результирующего момента сил равна нулю
где – момент инерции твёрдого тела относительно неподвижной оси Z; – угловая скорость относительно неподвижной оси Z.
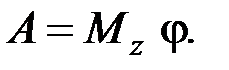
21. Работа внешних сил при вращении твёрдого тела относительно неподвижной оси Z
где – угол, на который поворачивается тело за время t; – проекция вектора момента силы на ось Z.
22. Работа постоянного момента силы
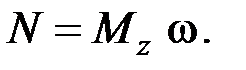
23. Мгновенная мощность во вращательном движении
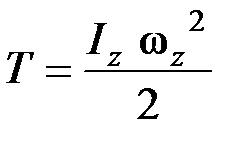
24. Кинетическая энергия тела, вращающегося относительно неподвижной оси Z:
,
где Iz – момент инерции тела относительно оси Z; – угловая скорость тела.
25. Кинетическая энергия плоского движения, когда ось вращения проходит через центр масс системы (тела)
,
где Ic – момент инерции тела относительно оси, проходящей через центр масс; – линейная скорость центра масс.
Плоское движение - это движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях.
26. Приращение кинетической энергии
где – работа всех сил, действующих на тело.
27. Убыль потенциальной энергии в поле консервативных сил
где – работа сил поля.
Консервативными называются силы соответствующие двум условиям:
- работа консервативных сил не зависит от пути перехода из одного состояния в другое, а определяется только начальным и конечным положениями рассматриваемой системы;
- работа консервативных сил на замкнутом переходе равна нулю.
28. Приращение полной механической энергии
где – работа результирующей всех сторонних сил, то есть сил, не принадлежащих к силам данного поля.
Примеры решения задач
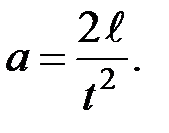
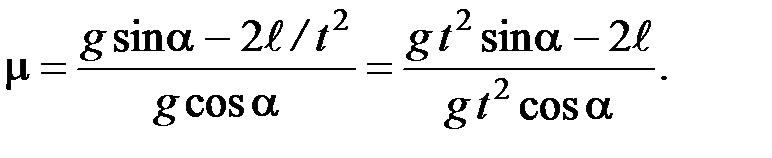
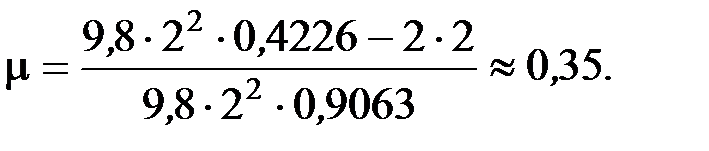
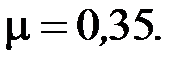
Пример 1. Наклонная плоскость, образующая угол с плоскостью горизонта, имеет длину . Тело, двигаясь равноускоренно, соскользнуло с этой плоскости за время . Определить коэффициент трения тела о плоскость.
Дано: ; м; с.
Найти:
a
X
Y
a
Решение. Изобразим силы, действующие на тело (рис. 6).
Рис. 6 –Наклонная плоскость
На рисунке – сила тяжести, – сила нормальной реакции опоры, – силатрения. Так как все силы, действующие на тело постоянные, то и его ускорение будет постоянным, а движение равноускоренным.
Для решения задачи используем второй закон Ньютона (в инерциальной системе отсчета):
а) в векторной форме
б) в проекциях на координатные оси
в проекции на ось X:;
в проекции на ось Y:
Составим систему уравнений
(1)
Выразим Fтр из системы уравнений (1):
(2)
Решив систему уравнений (1), с учетом Fтр = m N найдем коэффициент трения
(3)
В случае равноускоренного поступательного движения координата x изменяется по закону
Так как по условию , то путь пройденный телом S = x – x0:
Откуда
(4)
Подставим (4) в (3), получим
Выполним вычисления
Ответ:
Пример 2. Маховик вращается по закону, выражаемому уравнением , где рад; В = 16 рад/с; С = 2 рад/с2. Момент инерции маховика равен50 кг м2. Найти законы, по которым изменяются вращающий момент и мощность. Чему равна мощность в момент времени с.
Дано:; рад; ; ; I = 50 кг∙м2.
Найти: (t = 3 с).
Решение. Маховик вращается согласно закону
.
Мгновенная мощность
.
Определим выражение для угловой скорости, как производную от функции j(t)
Определим выражение для углового ускорения, как вторую производную от функции j(t)
Выполним вычисление :
рад/с; рад/с2= const.
Законы, по которым меняются:
а) вращающий момент ;
б) мгновенная мощность
Выполним вычисления:
Н∙м,
Вт.
Ответ: N = 5600 Вт.
Пример 3. Горизонтальная платформа массой кг вращается вокруг вертикальной оси, проходящей через центр платформы, с частотой . Человек массой стоит при этом на краю платформы. С какой угловой скоростью начнёт вращаться платформа, если человек перейдёт от края платформы к её центру? Считать платформу круглым однородным диском, а человека – материальной точкой.
Дано: кг; кг; мин –1= 0,13 с –1.
Найти:
Решение. Человек и платформа (рис. 7,8) составляют замкнутую механическую систему, поэтому можно воспользоваться законом сохранения моментаимпульса. Рассмотрим его относительно неподвижной оси Z:





 – это вектор, определяющий положение материальной точки в любой момент времени в заданной системе отсчёта (рис.1)
– это вектор, определяющий положение материальной точки в любой момент времени в заданной системе отсчёта (рис.1)
 единичные векторы направлений; x, y, z – координаты точек.
единичные векторы направлений; x, y, z – координаты точек.
 ,
, – перемещение материальной точки за интервал времени
– перемещение материальной точки за интервал времени  .
. .
. ,
, – путь, пройденный точкой за время
– путь, пройденный точкой за время  .
. .
. - вектор, определяемый производной радиуса-вектора движущейся точки по времени и направленный по касательной к рассматриваемой точке траектории в сторону движения.
- вектор, определяемый производной радиуса-вектора движущейся точки по времени и направленный по касательной к рассматриваемой точке траектории в сторону движения.
 ,
, ;
;  ;
;  – проекции вектора скорости на координатные оси.
– проекции вектора скорости на координатные оси. .
. ,
, - скорость точки в системе K;
- скорость точки в системе K;  - скорость этой точки в системе K ’;
- скорость этой точки в системе K ’;  - скорость системы K ’ относительно системы K.
- скорость системы K ’ относительно системы K. и
и  ,
, - относительная скорость первого тела относительно второго;
- относительная скорость первого тела относительно второго;  - относительная скорость второго тела относительно первого.
- относительная скорость второго тела относительно первого. ,
, – изменение вектора скорости за интервал времени
– изменение вектора скорости за интервал времени 

 совпадает с направлением вектора d
совпадает с направлением вектора d  (приращением вектора скорости за время d t)
(приращением вектора скорости за время d t) можно разложить на составляющие, направленные вдоль координатных осей
можно разложить на составляющие, направленные вдоль координатных осей
 – проекции вектора ускорения на оси координат.
– проекции вектора ускорения на оси координат.




 равно геометрической сумме тангенциальной
равно геометрической сумме тангенциальной  и нормальной
и нормальной  составляющих (рис.2).
составляющих (рис.2).
 ,
, , определяет изменение вектора скорости по направлению;
, определяет изменение вектора скорости по направлению;  , определяет изменение вектора скорости по величине.
, определяет изменение вектора скорости по величине.
 ;
;  ;
;  ,
, – производная модуля скорости по времени.
– производная модуля скорости по времени. ,
, – угловое перемещение материальной точки, модуль которого равен углу поворота.
– угловое перемещение материальной точки, модуль которого равен углу поворота.
 – приращение угла поворота за промежуток времени
– приращение угла поворота за промежуток времени  .
.




 и
и  (
( и
и  – псевдовектора, направленные вдоль оси вращения) определяют по правилу правого винта (рис. 3).
– псевдовектора, направленные вдоль оси вращения) определяют по правилу правого винта (рис. 3).
 .
.
 путь, пройденный точкой
путь, пройденный точкой  ,
, ;
; ;
; нормальная составляющая ускорения точки
нормальная составляющая ускорения точки .
. ) – это время, за которое точка совершает один оборот, то есть поворачивается на угол
) – это время, за которое точка совершает один оборот, то есть поворачивается на угол  радиан
радиан или
или  .
. .
. .
. ;
;  а)
а)  где
где  – радиус-вектор, определяющий положение материальной точки в момент времени t;
– радиус-вектор, определяющий положение материальной точки в момент времени t;
 – радиус-вектор, определяющий положение материальной точки в момент времени t = 0.
б) в координатной форме
– радиус-вектор, определяющий положение материальной точки в момент времени t = 0.
б) в координатной форме
 .
.
 ;
;  а)
а)  где
где  – начальное угловое перемещение.
б) в проекции на ось вращения Z
– начальное угловое перемещение.
б) в проекции на ось вращения Z
 .
.
 а)
а) 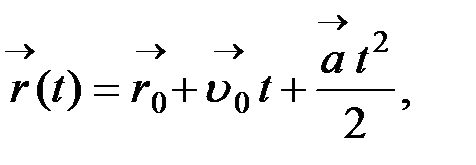 где
где  – начальная скорость.
б)в координатной форме
– начальная скорость.
б)в координатной форме
 .
в)
.
в)  .
г) в координатной форме
.
г) в координатной форме
 а)
а)  где
где  – начальная угловая скорость.
б) в проекции на ось вращения Z
– начальная угловая скорость.
б) в проекции на ось вращения Z
 .
.
 , где А= 4 м/с ,В = – 0,05 м/с2. Определить момент времени, в который скорость u точки равна нулю. Найти координату и ускорение точки в этот момент времени.
, где А= 4 м/с ,В = – 0,05 м/с2. Определить момент времени, в который скорость u точки равна нулю. Найти координату и ускорение точки в этот момент времени. ;
;  м/с;
м/с;  – 0,05 м/с2.
– 0,05 м/с2. ; 2) x; 3) a.
; 2) x; 3) a.

 ;
; ;
; ;
; .
. с.
с. м.
м.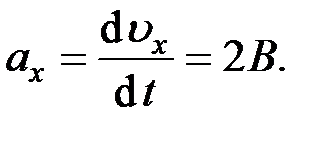
 – 0,1 м/с2.
– 0,1 м/с2.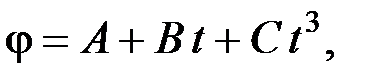 где
где  ;
;  ;
;  . Определить тангенциальное
. Определить тангенциальное  , нормальное
, нормальное  и полное а ускорения точек на окружности диска для момента времени
и полное а ускорения точек на окружности диска для момента времени  с.
с. ;
;  ;
;  ;
;  ;
;  см = 0,2 м;
см = 0,2 м;  с.
с.

 .
. для момента времени
для момента времени  с:
с: и угловым e ускорениями
и угловым e ускорениями .
.
 для момента времени
для момента времени  с:
с: .
. :
: м/с2.
м/с2.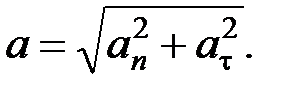
 м/с2.
м/с2. м/с2;
м/с2; 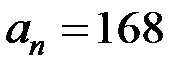 м/с2;
м/с2; 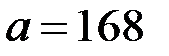 м/с2.
м/с2. , остальную часть пути – со скоростью
, остальную часть пути – со скоростью  . Определить среднюю путевую скорость
. Определить среднюю путевую скорость  автомобиля?
автомобиля? .
. .
. и
и  .
. , (1)
, (1)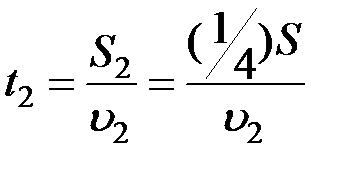 . (2)
. (2)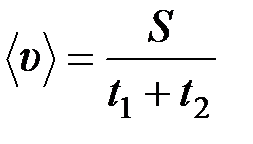 . (3)
. (3) .
. км/ч.
км/ч. = 64 км/ч.
= 64 км/ч.
 .
.


 ,
, – геометрическая сумма сил, действующих на материальную точку; N – число сил, действующих на точку;
– геометрическая сумма сил, действующих на материальную точку; N – число сил, действующих на точку;  – производная от импульса материальной точки по времени.
– производная от импульса материальной точки по времени.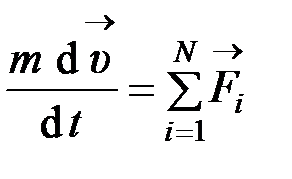 или
или 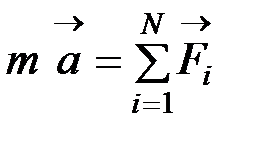 ,
, – вектор ускорения.
– вектор ускорения. ,
,  .
. и
и  , находящихся на расстоянии r друг от друга
, находящихся на расстоянии r друг от друга
 ,
, – ускорение свободного падения.
– ускорение свободного падения. ,
, – радиус-вектор, определяющий смещение частицы от положения равновесия. Примером такой силы является сила упругой деформации при растяжении (сжатии) пружины или стержня. В соответствии с законом Гука
– радиус-вектор, определяющий смещение частицы от положения равновесия. Примером такой силы является сила упругой деформации при растяжении (сжатии) пружины или стержня. В соответствии с законом Гука ,
, ,
, – коэффициент трения скольжения; N – сила нормального давления.
– коэффициент трения скольжения; N – сила нормального давления. ,
, – элементарный путь.
– элементарный путь. cosa = const)
cosa = const) ,
, – угол между направлениями векторов силы
– угол между направлениями векторов силы  и скорости
и скорости 
 или
или 
 – угол между векторами силы
– угол между векторами силы  и скорости
и скорости 
 , пренебрежимо малой по сравнению со скоростью света с:
, пренебрежимо малой по сравнению со скоростью света с: или
или 
 = const):
= const): ,
,
 или
или 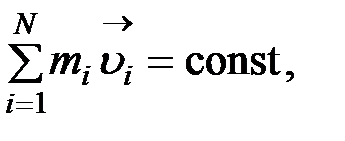
 материальной точки
материальной точки
 системы материальных точек
системы материальных точек
 – масса i -ойматериальной точки;
– масса i -ойматериальной точки;  – расстояние от этой точки до оси вращения;
– расстояние от этой точки до оси вращения; твердого тела
твердого тела ,
, – плотность тела в данной точке.
– плотность тела в данной точке. ,
, – момент инерции тела относительно оси, параллельной данной и проходящей через центр масс; m – масса тела; a – расстояние между произвольной осью и параллельной осью, проходящей через центр масс тела.
– момент инерции тела относительно оси, параллельной данной и проходящей через центр масс; m – масса тела; a – расстояние между произвольной осью и параллельной осью, проходящей через центр масс тела.


 относительно точки О равен векторному произведению векторов
относительно точки О равен векторному произведению векторов  и
и 
 ,
, – радиус-вектор, проведённый из точки О в точку приложения силы (рис. 5).
– радиус-вектор, проведённый из точки О в точку приложения силы (рис. 5).


 ,
, ,
, – момент инерции твёрдого тела относительно неподвижной оси Z;
– момент инерции твёрдого тела относительно неподвижной оси Z;  – проекция угловой скорости твёрдого тела на ось Z.
– проекция угловой скорости твёрдого тела на ось Z.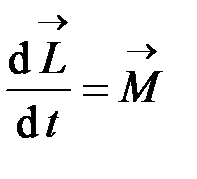 ,
, – момент импульса твёрдого тела;
– момент импульса твёрдого тела;  – результирующий момент внешних сил.
– результирующий момент внешних сил. ,
, – момент инерции твёрдого тела относительно неподвижной оси Z;
– момент инерции твёрдого тела относительно неподвижной оси Z;  – проекция углового ускорения твёрдого тела на ось Z.
– проекция углового ускорения твёрдого тела на ось Z. ):
):

 – момент инерции твёрдого тела относительно неподвижной оси Z;
– момент инерции твёрдого тела относительно неподвижной оси Z;  – угловая скорость относительно неподвижной оси Z.
– угловая скорость относительно неподвижной оси Z.
 – угол, на который поворачивается тело за время t;
– угол, на который поворачивается тело за время t;  – проекция вектора момента силы на ось Z.
– проекция вектора момента силы на ось Z.
 ,
, – угловая скорость тела.
– угловая скорость тела.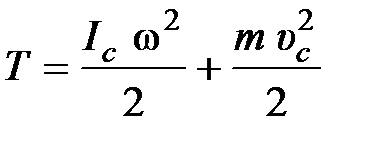 ,
, – линейная скорость центра масс.
– линейная скорость центра масс.
 – работа всех сил, действующих на тело.
– работа всех сил, действующих на тело.
 – работа сил поля.
– работа сил поля.
 – работа результирующей всех сторонних сил, то есть сил, не принадлежащих к силам данного поля.
– работа результирующей всех сторонних сил, то есть сил, не принадлежащих к силам данного поля. с плоскостью горизонта, имеет длину
с плоскостью горизонта, имеет длину  . Тело, двигаясь равноускоренно, соскользнуло с этой плоскости за время
. Тело, двигаясь равноускоренно, соскользнуло с этой плоскости за время  . Определить коэффициент трения
. Определить коэффициент трения  тела о плоскость.
тела о плоскость. ;
;  м;
м;  с.
с.




 – сила тяжести,
– сила тяжести,  – сила нормальной реакции опоры,
– сила нормальной реакции опоры,  – силатрения. Так как все силы, действующие на тело постоянные, то и его ускорение будет постоянным, а движение равноускоренным.
– силатрения. Так как все силы, действующие на тело постоянные, то и его ускорение будет постоянным, а движение равноускоренным.
 ;
;
 (1)
(1) (2)
(2) (3)
(3)
 , то путь пройденный телом
, то путь пройденный телом 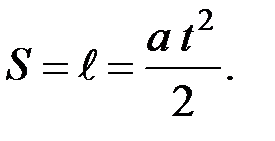
 (4)
(4)
 , где
, где  рад; В = 16 рад/с; С = 2 рад/с2. Момент инерции маховика равен50 кг м2. Найти законы, по которым изменяются вращающий момент и мощность. Чему равна мощность в момент времени
рад; В = 16 рад/с; С = 2 рад/с2. Момент инерции маховика равен50 кг м2. Найти законы, по которым изменяются вращающий момент и мощность. Чему равна мощность в момент времени  с.
с. ;
;  рад;
рад;  ;
;  ;
; (t = 3 с).
(t = 3 с). .
.
 .
.

 :
: рад/с;
рад/с;  рад/с2= const.
рад/с2= const. ;
;
 Н∙м,
Н∙м, Вт.
Вт.
 N = 5600 Вт.
N = 5600 Вт. кг вращается вокруг вертикальной оси, проходящей через центр платформы, с частотой
кг вращается вокруг вертикальной оси, проходящей через центр платформы, с частотой  . Человек массой
. Человек массой  стоит при этом на краю платформы. С какой угловой скоростью
стоит при этом на краю платформы. С какой угловой скоростью  начнёт вращаться платформа, если человек перейдёт от края платформы к её центру? Считать платформу круглым однородным диском, а человека – материальной точкой.
начнёт вращаться платформа, если человек перейдёт от края платформы к её центру? Считать платформу круглым однородным диском, а человека – материальной точкой. кг;
кг;  кг;
кг;  мин –1= 0,13 с –1.
мин –1= 0,13 с –1.
 или
или 




