

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
ЗАДАНИЕ № 4
Построение структурных сеток и графиков частот вращения
Расчет числа зубьев передач
Теоретическая часть
Для обеспечения необходимой точности настройки станка на заданную скорость резания необходимо иметь возможность устанавливать различную частоту вращения шпинделя в пределах от n min до n max, рассчитываемые по уравнению:
 |
где V – скорость резания, м/мин;
d – диаметр заготовки или инструмента, мм.
Диапазон регулирования частоты вращения шпинделя определяется по формуле:

и характеризует эксплутационные возможности станка.
Большое количество находящихся в эксплуатации станков имеют ступенчатые ряды частот вращения. Поэтому вместо частоты, обеспечивающей рассчитанную оптимальную скорость резания при заданном диаметре, приходится выбрать ближайшую меньшую из имеющихся на станке. Этой действительной частоте n Д будет соответствовать действительная скорость резания
 |
которая меньше расчетной на V − V Д.
Относительную потерю скорости резания определяют уравнением:
 |
которая будет тем меньше, чем меньше разность: n − n Д. Наиболее рационально частоты вращения от n minдо n maxрасполагать в геометрической прогрессии со знаменателем φ, т.е. соблюдать соотношение:
 |
Значение знаменателя геометрической прогрессии выбирается по приложению (табл. А1).
Совокупность передач, связывающих вращение двух соседних валов, образует группу передач. Ее характеризуют два показателя:
• количество передач в группе р;
• величины их передаточных отношений i.
Рассмотрим для простоты устройство шести ступенчатой коробки скоростей (рис. 1, а).
|
|
Для передачи вращения от вала I валу II служит множительный механизм с трехвенцовым блоком (колеса 1-2, 3-4, 5-6).
Для передачи вращения от вала II валу III – множительный механизм с двухвенцовым блоком (колеса 7-8, 9-10).
В результате последовательного соединения этих механизмов (обычная множительная структура) при одной скорости ведущего вала I ведомый вал III (или шпиндель) может иметь шесть различных угловых скоростей.
В рассматриваемой схеме мы имеем две множительные группы:
• первая состоит из трех передач (1-2; 3-4, 5-6);
• вторая – из двух передач (7-8, 9-10).
Порядок чередования групп вдоль кинематической цепи характеризует конструктивный вариант коробки.
Его условно можно выразить в виде структурной формулы:
z = 6 = 3 . 2.
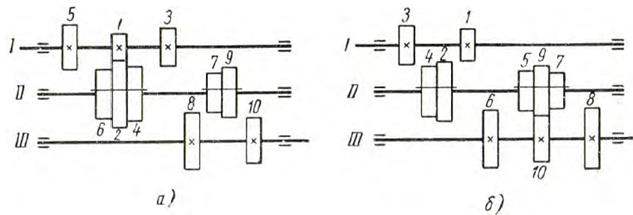
Рис. 1 – Схема шести ступенчатой коробки скоростей
Другой конструктивный вариант (порядок) имеет схема шести ступенчатой коробки скоростей (рис. 1, б). Здесь:
• в первой группе две передачи (1-2, 3-4);
• во второй – три передачи (5-6, 7-8, 9-10).
Структурная формула для этого варианта:
z = 6 = 2 ·3.
В общем виде число ступеней скорости, z = Pa, Pb, …, где Pa, P b, …, P m– число передач в первой, второй,..., m -й группах.
Количество возможных конструктивных вариантов одной и той же структуры равно числу перестановок m групп:
 |
q – число групп с одинаковым количеством передач.
Для нашего случая: число перестановок m = 2,число групп q = 1, следовательно К кс = (1 . 2)/ 1 = 2, а именно:
z = 6 = 3 . 2 = 2 . 3.
Отношение передаточных отношений передач в группе изменяется в φx раз и обусловлено кинематическим порядком (или вариантом) включения передач при переходе от одной скорости вращения шпинделя к другой.
Показатель степени х называется характеристикой группы. Структурную формулу, уточняющую не только конструктивный, но и кинематический порядок, принято записывать так:
z = P (x 1) P (х 2) … Р (xm).
Здесь место группы в формуле показывает конструктивный порядок и номер группы, а индекс – ее характеристику.
|
|
Для нашего примера z = 6 = 31 . 2 3.
Такая запись означает:
• первая группа имеет три передачи, а ее характеристика x 1= 1;
• вторая группа – две передачи, а характеристика x 2= 3.
Группу передач, имеющую характеристику х = 1, называют основной группой, остальные группы (при х > 1) – переборными.
Величина х в общем случае не может быть произвольной.
Если первая группа является основной, то характеристика последующих групп равна числу ступеней скорости полученных совокупностью групповых передач, кинематически предшествующих данной группе. Это положение на основании уравнения (1) представляется в следующем виде.
Если Х 1 = 1, то Х 2 = Ра; Х 3 = Ра Рb;...; Хm = Ра Рb,… Pm - 1.
Например:
Z = 8 = 21 . 22 . 24;
Z = 12 = 31 . 23 . 26;
Z = 18 = 31 . 33 . 29.
Возможны и другие кинематические варианты.
Общее их количество равно числу перестановок из m элементов, т. е. К кинем. = m!.
Для нашего примера К кинем. = 1 . 2 = 2.
Общее количество К возможных вариантов (конструктивных и кинематических) для обычных множительных структур равно:
K = К кс . К кинем..
Пример построения структурной сетки
В качестве примера возьмем привод (рис. 2), обеспечивающий двенадцать ступеней скорости (частот вращения) за счет последовательного соединения трех двухваловых шестеренных коробок (групп передач): одной на три ступени (передачи) и двух на две.
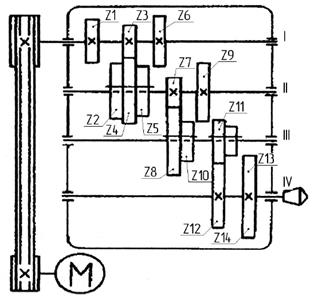 |
Рис. 2 – Кинематическая схема привода на 12 ступеней скоростей
Его структурная формула будет иметь вид Z = 3 . 2 . 2 = 12. Если в структурной формуле цифрами в скобках обозначить характеристики групп, например,
Z = 3(1) . 2(3) . 2(6),
то получим один из вариантов структурной формулы.
Первая в конструктивном отношении группа передач является основной (ее характеристика X 0= 1), т.е. она состоит из передач, отношение соседних по значению передаточных отношений которых равно φ 1.
Вторая группа передач является первой переборной с характеристикой, равной числу передач в основной группе, т.е. X 2= 3, а отношение соседних по значению передаточных отношений в ней равно φ 3.
Третья группа передач – вторая переборная. Ее характеристика равна произведению числа передач в основной и первой переборной группах, т.е. X 3= 3 . 2 = 6, а отношение соседних по значению передаточных отношений в ней равно φ 6.
|
|
Принципиально возможны варианты структурных формул, а значит, и конструкций приводов, полученные путем изменения конструктивного (последовательности расположения групп) и кинематического (изменения значения характеристик) порядка, например:
Z = 3(2) . 2(6) . 2(1); Z = 2(6) . 2(1) . 3(2) и т.д.
 | |||
 | |||
 |
Рис. 3 – Варианты структурных сеток для Z = 3 . 2 . 2 = 12
Для принятого конструктивного варианта (рис. 3) можно написать шесть вариантов структурных формул:
1. Z = 3[1] . 2[3] . 2[6] = 12; 4. Z = 3[4] . 2[1] . 2[2] = 12;
2. Z = 3[1] . 2[6] . 2[3] = 12; 5. Z = 3[2] . 2[6] . 2[1] = 12;
3. Z = 3[2] . 2[1] . 2[6] = 12; 6. Z = 3[4] . 2[2] . 2[1] = 12.
и построить шесть вариантов структурных сеток (рис. 3).
После построения всех вариантов структурных сеток выбирают оптимальный вариант.
При выборе оптимального варианта структурной сетки (варианта структурной формулы) необходимо учитывать следующее.
1) Во избежание чрезмерно больших диаметров зубчатых колес в коробках скоростей, а также в целях нормальной их работы практикой рекомендованы следующие предельные передаточные отношения в группах:
 |
Следовательно, наибольший диапазон регулирования в группе равен:
 |
Поэтому необходимо сначала определить диапазон регулирования в последней переборной группе для всех структурных сеток (при выбранном значении φ) и исключить из дальнейшего рассмотрения варианты, не удовлетворяющие условию:
 |
В нашем примере:
для вариантов 1), 2), 3), 5) X max= 6;
для вариантов 4), 6) X max= 8.
Если знаменатель ряда φ частот вращения шпинделя выбран равным 1,26, то согласно табл. 1, для φ = 1,26, X max = 9 следовательно, все варианты структурных сеток удовлетворяют указанному условию.
Если выбран φ = 1,41, то из рассмотрения следует исключить варианты 4) и 6).
При φ = 1,58и более ни один из вариантов непригоден.
Таблица 1 – Максимально допустимые величины Хmax
| Для коробок | φ | ||||||
| 1,06 | 1,12 | 1,26 | 1,41 | 1,58 | 1,78 | 2,0 | |
| скоростей | |||||||
| подач |
2) Далее выбирают структурные сетки, у которых:
|
|
− в качестве основной и первой в конструктивном порядке взята группа с наибольшим числом ступеней;
− переборные расположены в порядке убывания числа их ступеней.
3) Из всех вариантов, удовлетворяющих данному условию, выбирают:
− вариант с наиболее плотным расположением лучей в первых в конструктивном порядке передачах.
С учетом перечисленных рекомендаций обычно наиболее оптимальным, и для рассматриваемого примера в том числе, вариантом структурной сетки будет (рис. 4):
z = 3(1) . 2(3) . 2(6) = 12.
Здесь лучи располагаются более тесно.
 |
Рис. 4 – Структурная сетка привода: z = 3(1) . 2(3) . 2(6) = 12.
Выбрав оптимальный вариант структурной сетки, приступают к построению графика частот вращения.
Алгоритм построения графика частот вращения (чисел оборотов)
Для построения графика частот вращения должны быть известны:
а) φ – знаменатель ряда частот вращения;
б) фактические значения частот вращения от n 1 = n min до nz = n max;
в) n 0– число оборотов выбранного приводного электродвигателя;
г) полная кинематическая схема привода.
График частот вращения строится на поле, аналогичном полю для построения структурных сеток, увеличив число вертикальных линий на одну (на вал приводного двигателя), и вместо порядковых номеров частот горизонтальным линиям присваивают их фактические значения.
Сначала на этом поле, соединяя лучами линии валов, намечают цепь передач для снижения чисел оборотов с n 0 до n 1. Для этого используют одну передачу каждой группы, в том числе и ременную, соединяющую вал двигателя и входной (первый) вал коробки, если она предусмотрена в кинематической схеме.
Передаточные отношения этих передач распределяют таким образом, чтобы редукция от входной передачи к выходной плавно нарастала. При этом подразумевается, что:
 − линия, соединяющая на графике две точки валов, обозначает передачу с передаточным отношением i = φ m, где m – число интервалов lg φ, перекрываемых лучом;
− линия, соединяющая на графике две точки валов, обозначает передачу с передаточным отношением i = φ m, где m – число интервалов lg φ, перекрываемых лучом;
− если луч отклоняется вниз, то передача понижающая, т.е.
− если вверх – повышающая, т.е. i = φ m;
− для горизонтального луча i = φ 0 = 1.
При построении графика чисел оборотов необходимо выбирать на промежуточных валах такие точки, чтобы передаточные отношения были в пределах допустимых:
i min пред ≥ 0,25 и i max пред ≤ 2,
Для ременных передач передаточные отношения рекомендуется выбирать в пределах:
1/3 ≤ i p < 2,5.
Дальнейшее построение ведут в соответствии с выбранным вариантом структурной сетки, выдерживая соответствующие характеристики групп.
Построение графика частот вращения (чисел оборотов)
Задано:
− число скоростей шпинделя z = 12;
|
|
− структурная формула z = 3(1) . 2(3) . 2(6) = 12;
− знаменатель ряда φ = 1,26;
− минимальное число оборотов шпинделя n 1= 50 об / мин;
− число оборотов приводного электродвигателя n э= 1440 об / мин.
Задание
1 Составить кинематическую схему трех валовой коробки скоростей.
2 Рассчитать геометрический ряд частот вращения на выходном валу.
По приложению Б (таблица Б.1) выбирать ближайшие стандартные значения частот вращения.
3 Построить структурные сетки для кинематических вариантов.
4 Построить график частот вращения.
5 Рассчитать значения передаточных отношений.
6 Определить числа зубьев передач.
7 Выполнить проверку. Определить n minпо рассчитанной коробке скоростей.
Исходные данные
− число скоростей шпинделя z = 9;
− структурная формула z = 3 . 3 = 9;
− знаменатель ряда частот вращения φ = 1,26;
− минимальное число оборотов шпинделя n min = 160 об/мин;
− частота вращении ведущего вала n = 1000 об/мин.
ЗАДАНИЕ № 4
Построение структурных сеток и графиков частот вращения
Расчет числа зубьев передач
Теоретическая часть
Для обеспечения необходимой точности настройки станка на заданную скорость резания необходимо иметь возможность устанавливать различную частоту вращения шпинделя в пределах от n min до n max, рассчитываемые по уравнению:
|
где V – скорость резания, м/мин;
d – диаметр заготовки или инструмента, мм.
Диапазон регулирования частоты вращения шпинделя определяется по формуле:
и характеризует эксплутационные возможности станка.
Большое количество находящихся в эксплуатации станков имеют ступенчатые ряды частот вращения. Поэтому вместо частоты, обеспечивающей рассчитанную оптимальную скорость резания при заданном диаметре, приходится выбрать ближайшую меньшую из имеющихся на станке. Этой действительной частоте n Д будет соответствовать действительная скорость резания
|
которая меньше расчетной на V − V Д.
Относительную потерю скорости резания определяют уравнением:
|
которая будет тем меньше, чем меньше разность: n − n Д. Наиболее рационально частоты вращения от n minдо n maxрасполагать в геометрической прогрессии со знаменателем φ, т.е. соблюдать соотношение:
|
Значение знаменателя геометрической прогрессии выбирается по приложению (табл. А1).
Совокупность передач, связывающих вращение двух соседних валов, образует группу передач. Ее характеризуют два показателя:
• количество передач в группе р;
• величины их передаточных отношений i.
Рассмотрим для простоты устройство шести ступенчатой коробки скоростей (рис. 1, а).
Для передачи вращения от вала I валу II служит множительный механизм с трехвенцовым блоком (колеса 1-2, 3-4, 5-6).
Для передачи вращения от вала II валу III – множительный механизм с двухвенцовым блоком (колеса 7-8, 9-10).
В результате последовательного соединения этих механизмов (обычная множительная структура) при одной скорости ведущего вала I ведомый вал III (или шпиндель) может иметь шесть различных угловых скоростей.
В рассматриваемой схеме мы имеем две множительные группы:
• первая состоит из трех передач (1-2; 3-4, 5-6);
• вторая – из двух передач (7-8, 9-10).
Порядок чередования групп вдоль кинематической цепи характеризует конструктивный вариант коробки.
Его условно можно выразить в виде структурной формулы:
z = 6 = 3 . 2.
Рис. 1 – Схема шести ступенчатой коробки скоростей
Другой конструктивный вариант (порядок) имеет схема шести ступенчатой коробки скоростей (рис. 1, б). Здесь:
• в первой группе две передачи (1-2, 3-4);
• во второй – три передачи (5-6, 7-8, 9-10).
Структурная формула для этого варианта:
z = 6 = 2 ·3.
В общем виде число ступеней скорости, z = Pa, Pb, …, где Pa, P b, …, P m– число передач в первой, второй,..., m -й группах.
Количество возможных конструктивных вариантов одной и той же структуры равно числу перестановок m групп:
|
q – число групп с одинаковым количеством передач.
Для нашего случая: число перестановок m = 2,число групп q = 1, следовательно К кс = (1 . 2)/ 1 = 2, а именно:
z = 6 = 3 . 2 = 2 . 3.
Отношение передаточных отношений передач в группе изменяется в φx раз и обусловлено кинематическим порядком (или вариантом) включения передач при переходе от одной скорости вращения шпинделя к другой.
Показатель степени х называется характеристикой группы. Структурную формулу, уточняющую не только конструктивный, но и кинематический порядок, принято записывать так:
z = P (x 1) P (х 2) … Р (xm).
Здесь место группы в формуле показывает конструктивный порядок и номер группы, а индекс – ее характеристику.
Для нашего примера z = 6 = 31 . 2 3.
Такая запись означает:
• первая группа имеет три передачи, а ее характеристика x 1= 1;
• вторая группа – две передачи, а характеристика x 2= 3.
Группу передач, имеющую характеристику х = 1, называют основной группой, остальные группы (при х > 1) – переборными.
Величина х в общем случае не может быть произвольной.
Если первая группа является основной, то характеристика последующих групп равна числу ступеней скорости полученных совокупностью групповых передач, кинематически предшествующих данной группе. Это положение на основании уравнения (1) представляется в следующем виде.
Если Х 1 = 1, то Х 2 = Ра; Х 3 = Ра Рb;...; Хm = Ра Рb,… Pm - 1.
Например:
Z = 8 = 21 . 22 . 24;
Z = 12 = 31 . 23 . 26;
Z = 18 = 31 . 33 . 29.
Возможны и другие кинематические варианты.
Общее их количество равно числу перестановок из m элементов, т. е. К кинем. = m!.
Для нашего примера К кинем. = 1 . 2 = 2.
Общее количество К возможных вариантов (конструктивных и кинематических) для обычных множительных структур равно:
K = К кс . К кинем..
|
|
|

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!