

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Дисциплины:
|
из
5.00
|
Заказать работу |
Радиотехнические средства посадки
Введение
Светотехнические и радиотехнические наземные средства аэропортов составляют систему обеспечения посадки воздушных судов.
Ночью и в сложных метеорологических условиях днем, когда естественные наземные ориентиры не видны, значительная роль отводится светотехническим средствам, особенно на завершающих этапах посадки (планирование, выравнивание, приземление и пробег по взлетно-посадочной полосе).
Пилот, установив визуальный контакт с землей, при помощи светотехнических средств получает информацию о положении ВС относительно ВПП (направление на ось ВПП, удаление до ВПП, плоскость горизонта, обозначение ВПП, место приземления и направление пробега после посадки).
Время, в течение которого пилот получает световую информацию, зависит от посадочной скорости воздушного судна и метеорологических условий: чем выше посадочная скорость и меньше дальность видимости световых сигналов, тем меньше времени отводится пилоту для установления визуального контакта средствами системы посадки и принятия решения.
Световые характеристики и места установки огней должны быть такими, чтобы в условиях плохой видимости пилот в зоне приближения к ВППи месту приземления ВС отчетливо видел определенное число светосигнальных огней, по расположению которых мог определить направление на ВПП и крен ВС.
Радиотехнические системы посадки
Радиотехнические системы посадки можно разделить на две основные группы: системы инструментальной посадки, т.е. системы посадки по приборам и системы посадки по командам о земли.
В системах инструментальной посадки активная роль отводится, экипажам снижающихся самолетов, которые производят посадку по приборам, используя сигналы специальных наземных радиосредств, а в системах посадки по командам с земли экипажи снижающихся самолетов выполняют команды наземного персонала, передаваемые по каналам радиосвязи. При этом положение самолета в пространстве определяется с помощью радиолокационных наземных средств.
В настоящее время существует два основных типа инструментальной посадки: упрощенные системы посадки и радиомаячные системы посадки.
Упрощенные системы посадки
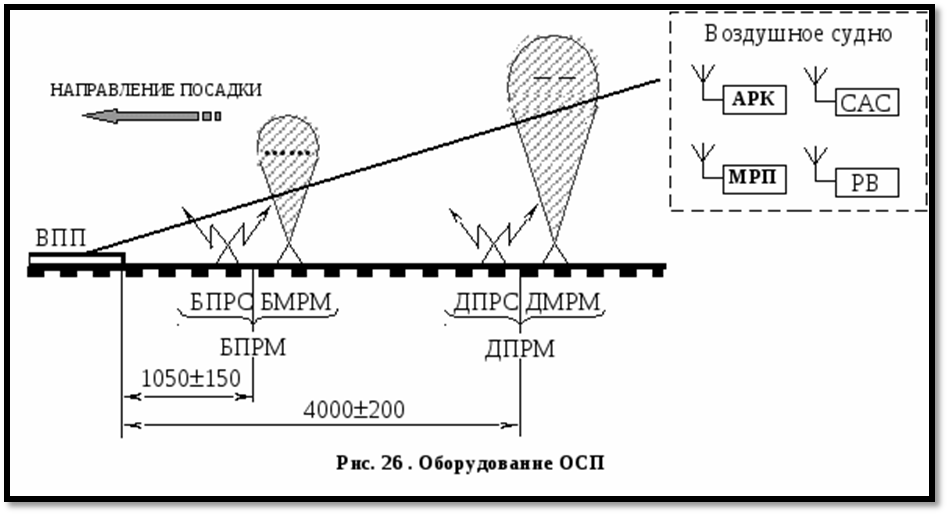
Упрощенные системы посадки или системы посадки ОСП обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра при заходе на посадку, определение местоположения ВС в двух фиксированных точках траектории снижения на посадку и посадки.
Упрощенные системы посадки устанавливают на некатегорированных аэродромах.
В состав ОСП входят дальний и ближний радиомаркерные пункты (ДПРМ и БПРМ), оснащенные дальней и ближней приводными радиостанциями и маркерными радиомаяками (рис.1).
Дальний и ближний радиомаркерные пункты устанавливают на расстояниях соответственно 4000±200 м и 1050±150 м от порога ВПП на продолжении осевой линии ВПП.
| Рис.1. |
Допускается смещение антенной системы приводной радиостанции, устанавливаемой на БПРМ, в сторону от осевой линии ВПП не более чем на 15м, а антенной системы приводной радиостанции, устанавливаемой на ДПРМ, не более чем на 75м.
Приводные радиостанции представляют собой передающие устройства, работающие в диапазоне гектометровых (средних) волн. Они предназначены для привода ВС, оборудованных радиокомпасами, в определенные точки ка местности. Приводные радиостанции различаются уровнем излучающей мощности, а следовательно, дальностью действия и степенью автоматизации. Наиболее широко распространены, автоматизированные приводные радиостанции АПР-7 и АПР-8. АПР-7 используется в качестве дальней приводной радиостанции (ДПРМ), а на БПРМ устанавливается АПР-8.
Принцип действия радиостанций АПР-7 и АПР-8 и конструктивные решения одинаковы. Различаются они уровнем излучаемой мощности и связанными с этим схемными решениями.
Основные технические характеристики АРП-7
Диапазон частот………………………………………150-1300 кГц
Число поддиапазонов……………………………….10
Режим излучения……………………………………..непрерывный
Мощность излучения сигнала
Ø в телеграфном режиме……………………..300-1200 Вт
Ø в телефонном режиме………………………150-600 Вт
Зона действия:
Ø в телеграфном режиме……………………..350-600 км
Ø в телефонном режиме………………………250-400 км
Резервирование передающих устройств……….100%
Время перехода на резерв…………………………30-90 сек
Управление радиостанцией может быть местным или дистанционным. Техническое состояние радиостанции контролируется автоматически. В случае неисправности в рабочем комплекте осуществляется автоматическое переключение на резервный комплект.
Каждая приводная радиостанция имеет свой сигнал опознавания (позывной). Так, например, дальние приводные радиостанции имеют двухбуквенный опознавательный сигнал, а ближние приводные радиостанции - однобуквенные опознавательный сигнал.
По позывным приводной радиостанции, установленной на ДПРМ, определяют посадочный курс ВПП.
Каждая приводная радиостанция, установленная на аэродроме работает на определенной частоте в заданном режиме. При необходимости работа приводов может быть переведена на резервные частоты по варианту I или II.
Резервные частоты приводных радиостанций:
Ø I вариант: ДПРМ - 725 кГц, БПРМ - 355 кГц;
Ø II вариант: ДПРМ - 355 кГц, БПРМ - 725 кГц.
Резервные частоты с борта ВС не заказываются. Экипажи ВС оповещаются о том, что приводные радиостанции работают на резервных частотах по варианту I или II.
Маркерные радиомаяки предназначены, для маркировки точек их установки на земной поверхности. Установленные на ДПРМ и БПРМ, они служат для определения момента пролета посадочных приводных радиостанций.
Маркерный радиомаяк представляет собой передающее устройство, работающее на фиксированной частоте 75 МГц. Антенна МРМ имеет узкую конусообразную диаграмму направленности в вертикальной плоскости. Благодаря такой диаграмме направленности сигналы МРМ принимаются на ВС только в момент пролета маяка (см.рис.1)
При пролете зоны действия МРМ на борту ВС срабатывает звуковая и световая сигнализации. Для опознавания маяков их сигналы манипулируются последовательно два тире в секунду для ДПРМ и шесть точек в секунду для БПРМ.
Зона действия МРМ на линии курса и глиссады: БПРМ - 300±100; ДПРМ - 600±200.
Курсовой радиомаяк
Курсовой радиомаяк предназначен для задания линий курса посадки, совпадающей с осью ВПП. Линия курса - это геометрическое место точек, ближайших к оси ВПП в горизонтальной плоскости, в которой разность глубины модуляций РГМ равна нулю.
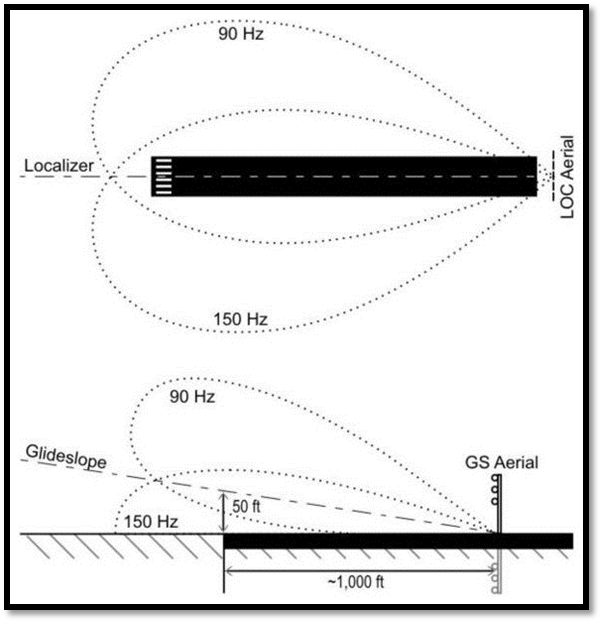
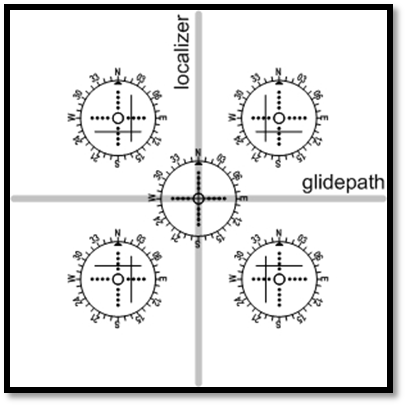
Рис.5.Диаграмма излучения КРМ и ГРМ, работающих по принципу ИЛС
Антенная система КРМ формирует в пространстве одновременно две диаграммы излучения (рис.5). Одна из этих диаграмм должна создаваться несущей частотой, промоделированной по амплитуде частотой 90 Гц, другая диаграмма - той же несущей частотой, промодулированной по амплитуде частотой 150 Гц. Пересечение этих диаграмм образует линию курса, слева от которой преобладает сигнал с частотой модуляций 90 Гц, справа - сигнал с частотой модуляции 150 Гц.
По линии курса посадки, совпадающей с осью ВПП, коэффициент глубины пространственной модуляции М 1 и М 2 равны между собой, т.е. разность глубины модуляции равна нулю. Слева и справа от линии курса посадки один коэффициент увеличивается, другой уменьшается, РГМ не равна нулю, что и используется для определения углового отклонения ВС от оси ВПП в бортовой аппаратуре.
Основные технические характеристики
Диапазон частот, МГц…………………………………………………….108-112
Зона действия в горизонтальной плоскости
ограничивается сектором относительно линии курса, град…….±35
Примечание.
Допускается сужение зоны действия в горизонтальной плоскости до ±10° относительно линии курса.
Зона действия в вертикальной плоскости, град……………………7
Дальность действия в секторе ±10° относительно
линии курса в горизонтальной плоскости, км………………………46
Дальность действия в секторе ±35° относительно
линии курса в горизонтальной плоскости, км………………………32
Допустимое отклонение линии курса от оси ВПП
у опорной точки, м:
Ø КРМ I…………………………………………………………………±10,5
Ø КРМ II………………………………………………………………..±7,5
Ø КРМ III……………………………………………………………….±3
Передающие устройства аппаратуры должны иметь 100% резервирование. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля КРМ.
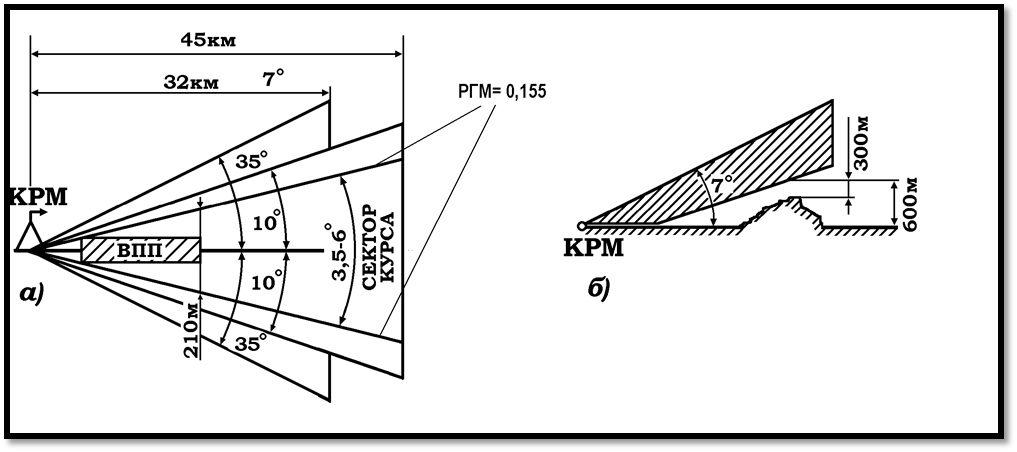
Рис.6. Зона действия КРМ I, II и III категорий в: а) – горизонтальной и б) – вертикальной плоскостях
Глиссадный радиомаяк
Глиссадный радиомаяк задает в пространстве плоскость планирования, наклонную к горизонтальной под определенным углом.
Антенная система глиссадного радиомаяка формирует в пространстве (вертикальной плоскости), двухлепестковые взаимно пересекающиеся диаграммы направленности. Напряжение несущей частоты модулируется по амплитуде напряжениями частоты 90Гц в верхнем лепестке, 150Гц - нижнем (рис.5).
Диаграммы направленности взаимно пересекаются, образуя равносигнальную зону, наклоненную к плоскости горизонта (ВПП) под определенным углом. Оптимальный угол наклона (Ɵ) составляет 2°40'.
По линии глиссады коэффициенты пространственной глубины модуляции М 1 и М 2 одинаковы - РГМ равна нулю. Выше и ниже глиссады коэффициенты М 1 и М 2 не равны между собой - РГМ не равна нулю. Это используется для определения углового отклонения от линии глиссады в бортовой аппаратуре.
Основные технические характеристики
Диапазон рабочих частот, МГц………………………………………………………328-335
Зона действия в горизонтальной плоскости относительно
линии курса, град……………………………………………………………………не менее 8
Зона действия в вертикальной плоскости ограничивается
углами относительно горизонта:
Ø выше линии глиссады, град……………………………………….не менее 1,75Ɵ
Ø ниже линии глиссады, град……………………………………….не менее 0,3Ɵ
Пределы установки угла глиссады, град………………………………………………..2-5
Дальность действия, км…………………………………………………………не менее 18
Допустимое отклонение среднего угла глиссады от
установленного номинального значения, град:
Ø ГРМ I………………………………………………………………………………...±0,75Ɵ
Ø ГРМ II………………………………………………………………………………..±0,75Ɵ
Ø ГРМ III……………………………………………………………………………….±0,04Ɵ
Передающие устройства аппаратуры должны иметь 100% резервирование. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля.
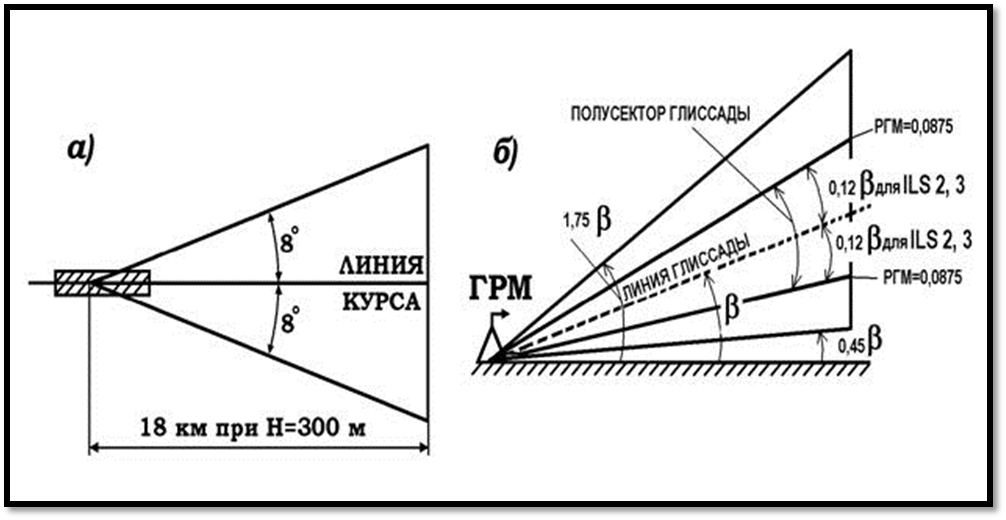
Рис.7. Зона действия ГРМ I, II и III категорий в: а) - горизонтальной и б) - вертикальной плоскостях
Маркерные маяки
Маркерные маяки предназначены для обозначения определенных точек земной поверхности. МРМ вырабатывают сигналы, позволяющие на борту ВС определить момент их пролета над местом установки. В настоящее время в ГА эксплуатируются радиомаяки МРМ-70 и МКЛ-8.
Антенны формируют диаграмму направленности в вертикальной плоскости так называемой факельной формы.
Диаграмма направленности в горизонтальной плоскости имеет такую ширину, чтобы при отклонении ВС от линии курса в пределах зоны действия КРМ ВС не вышло за пределы излучения антенной системы МРМ.
Основные технические характеристики МРМ
Зона действия на линии курса и глиссада, м:
Ø внутреннего МРМ…………………………….150+50
Ø ближнего МРМ…………………………………300+100
Ø дальнего МРМ………………………………….600+200
Ø дополнительного (внешнего) МРМ……….600+200
Радиочастота, МГц…………………………………….75
Сигнал опознавания должен быть следующий:
Ø внутренний МРМ - непрерывный сигнал без манипуляций;
Ø ближний МРМ - непрерывная последовательность чередующихся точек, передавае- мых со скоростью 6 точек в секунду;
Ø дальний МРМ - непрерывная последовательность тире, передаваемых со скоростью 2 тире в секунду;
Ø дополнительный (внешний) МРМ - непрерывная серия чередующихся точек и тире.
Передающие устройства аппаратуры должны иметь 100% резерв. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля МРМ.
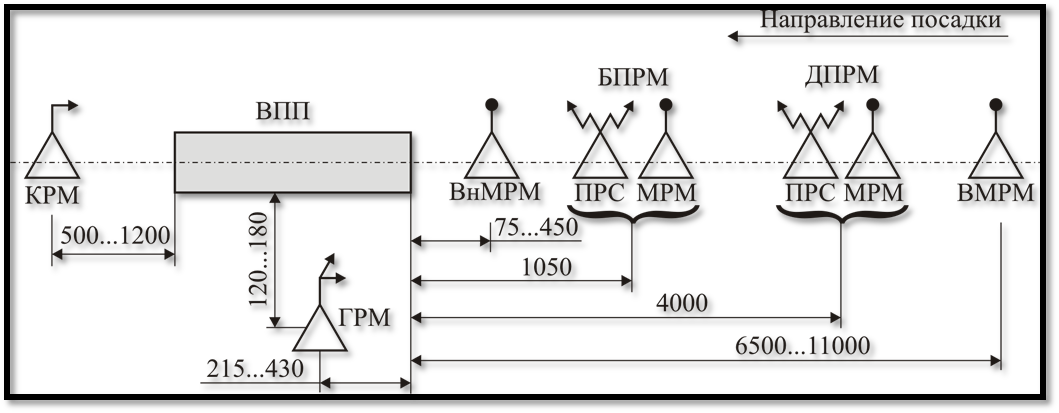
Рис.8.Размещение маркерных радиомаяков на аэродромах ГА
Посадочный радиолокатор
Основным элементом РСП является посадочный радиолокатор, предназначенный для контроля за положением ВС, начиная со входа ВС в зону действия посадочного радиолокатора (с начала четвертого разворота прямоугольного маршрута) и до высоты 30-40 м относительно уровня ВПП.
Положение ВС определяется по отклонениям его отметки на индикаторе ПРЛ от курса посадки, номинальной глиссады и дальностью до точки приземления. Обнаруженные с помощью ПРЛ отклонения от линии курса и глиссады передаются на борт ВС по линии радиосвязи.
При использовании ПРЛ как средства управления ВС, заходящими на посадку, необходимость в дополнительном посадочном оборудовании на борту ВС отпадает, что является достоинством данной системы по сравнению с РМС. Однако точность вывода ВС в заданную точку с помощью РСП ниже, чем с помощью РМСП, поэтому при оборудовании аэродрома той и другой системами посадки заход ВС на посадку осуществляется по РМСП, а РСП используется для контроля за посадкой ВС.
Существующие в ГА предельно допустимые отклонения ВС при заходе на посадку по курсу и глиссаде используются диспетчерским персоналом при контроле за заходящим на посадку ВС табл.1.
Таблица 1
| Д до ВПП, км | Формулы | |||||||||
| По курсу ± м | ∆Км=Дкм×32 | |||||||||
| По глиссаде ± м | ∆Гм=Дкм×8 |
Отклонения ВС на участке от ДПРМ до БПРМ за пределы, указанные в таблице, являются грубым отклонением – ЭВС обязан уйти на 2й круг, а диспетчер должен дать команду об уходе на 2й круг.

Рис.11. Вид развертки на ИКГ: ЗЛП – заданная линия пути;
ЛРО – линии равных отклонений; Ц – цель ВС.
ПРЛ является радиолокационной станцией секторного обзора, которая обеспечивает наблюдение сектора воздушного пространства с помощью курсовой и глиссадной антенны. Зона действия РЛС ограничена по азимуту углом 30°, а по углу места - 9°. Дальность действия посадочного радиолокатора составляет 20 км.
Курсовая антенна предназначена для контроля за положением ВС относительно плоскости курса, глиссадная – относительно плоскости планирования. Необходимая точность определения местоположения ВС обеспечивается применением антенн с остронаправленным излучением.
Посадочный радиолокатор состоит из трех основных частей: антенной системы, приемопередатчика и индикатора.
Принцип заключается в следующем. Излученные посадочным радиолокатором радиоимпульсы отражаются от ВС, принимаются антеннами радиолокатора и поступают в приемник. После соответствующего преобразования импульсы поступают на совмещенный индикатор курса и глиссады, где видна глиссада снижения и линия курса. Кроме отметки от ВС на экране высвечиваются линии дальности, по которым можно установить удаление ВС от торца ВПП (рис.11).
Посадочный радиолокатор рекомендуется устанавливать на траверзе ВПП на расстоянии 120-185 м от ее оси, на стороне, противоположной участку застройки и рулежным дорожкам. С места установки посадочного радиолокатора не должно быть естественных и искусственных препятствий, образующих углы закрытия более 0,5°.
Основными типами посадочных радиолокационных станций, используемых в аэропортах ГА, являются радиолокаторы РП-3Г и РП-4Г, выпускаемые фирмой «Тесла» (Чехия).
| Рис.12. Размещение посадочного радиолокатора на аэродроме. |

Основные технические характеристики посадочного радиолокатора РП-3Г(РП-4Г)
Длина волны сантиметровая в пределах, см………………………………….3,2(3,5)
Дальность действия, км……………………………………………………………..20(30)
Режим обзора секторный
Сектор обзора:
Ø по азимуту, град……………………………………………………………….30
Ø по углу места, град……………………………………………………………10
Диаграмма направленности антенны
а) курсовой:
Ø ширина в горизонтальной плоскости, град……………………………..0,8
Ø ширина в вертикальной плоскости, град………………………………..от 1 до 7(6)
б) глиссадной:
Ø ширина в вертикальной плоскости, град………………………………..0,6(0,5)
Ø ширина горизонтальной плоскости, град…………………….............от – 5 до + 20
Разрешающая способность на удалении на удалении до 17 км:
Ø по дальности, м……………………………………………………………….150(120)
Ø по азимуту, град……………………………………………………………….0,8(1,2)
Ø по углу места, град……………………………………………………………0,6
Разрешающая способность на удалении на удалении от 17 до 30 км, только для РП-4Г:
Ø по дальности, м………………………………………………………………..250
Ø по азимуту, град……………………………………………………………….2
Ø по углу места, град……………………………………………………………1,5
Точность определения координат:
Ø по дальности, м………………………………………………………………..30
Ø по азимуту, м……………………………………………………………………9
Ø по углу места, м………………………………………………………………..6
Скорость обзора, циклов/мин……………………………………………………….15
Ограничения по ветру, м/с…………………………………………………………..20
Импульсная мощность передатчика, квт…………………………………………150
Радиотехнические средства посадки
Введение
Светотехнические и радиотехнические наземные средства аэропортов составляют систему обеспечения посадки воздушных судов.
Ночью и в сложных метеорологических условиях днем, когда естественные наземные ориентиры не видны, значительная роль отводится светотехническим средствам, особенно на завершающих этапах посадки (планирование, выравнивание, приземление и пробег по взлетно-посадочной полосе).
Пилот, установив визуальный контакт с землей, при помощи светотехнических средств получает информацию о положении ВС относительно ВПП (направление на ось ВПП, удаление до ВПП, плоскость горизонта, обозначение ВПП, место приземления и направление пробега после посадки).
Время, в течение которого пилот получает световую информацию, зависит от посадочной скорости воздушного судна и метеорологических условий: чем выше посадочная скорость и меньше дальность видимости световых сигналов, тем меньше времени отводится пилоту для установления визуального контакта средствами системы посадки и принятия решения.
Световые характеристики и места установки огней должны быть такими, чтобы в условиях плохой видимости пилот в зоне приближения к ВППи месту приземления ВС отчетливо видел определенное число светосигнальных огней, по расположению которых мог определить направление на ВПП и крен ВС.

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!