УЧЕБНОЕ ПОСОБИЕ
«Аппаратное обеспечение МПСА НПС»
Новокуйбышевск, 2021 г.
Разработчик: А.Н.Кузнецов преподаватель НОУ ДПО НУК
Краткая аннотация:
Данное пособие освещает теоретические вопросы по теме: «Аппаратное обеспечение МПСА» и содержит описание структурного состава и принципов функционирования микропроцессорной системы автоматизации, а также сведения, необходимые для правильной эксплуатации системы автоматизации НПС. Пособие дает возможность для самостоятельной работы учащихся по изучению материала.
Рекомендуется использовать совместно с методическим руководством МПСА НПС.
Предназначено для слесарей КИП и А, электромехаников по СА и ПТО.
Рассмотрено и утверждено
на заседании методического совета
№ от«___»___________2020 г.
Содержание:
| №
п/п
| Наименование тем
| Страница
|
| 1
| Построение систем микропроцессорной автоматики
| 4
|
| 2
| Структура многоуровневой АСУ ТП и её задачи
| 5
|
| 3
| Функции, реализуемые системой автоматики НПС
| 6
|
| 4
| Организация связи в системах автоматизации
| 9
|
| 5
| Объёмы и схемы автоматизации МНА и ПНА
| 16
|
| 6
| Объёмы и схемы автоматизации МНС
| 18
|
| 7
| Режимы управления МНА, ПНА и агрегатами вспомогательных систем
| 21
|
| 8
| Объёмы автоматизации МС, ОУ, ПВВ
| 23
|
| 9
| Линейная и станционная ТМ
| 25
|
| 10
| Системы автоматического пожаротушения
| 26
|
| 11
| Условные обозначения элементов автоматики на эл. схемах
| 28
|
| 12
| Методы связи КИП с МПСА
| 30
|
| 13
| Требования к разделению цепей при прокладке кабелей
| 32
|
| 14
| Методы регулирования давления. Требования РД к регулированию
| 34
|
| 15
| Назначение САРД НПС. Блок-схема электрического регулирования давления
| 35
|
| 16
| Критерии качества САР. Регуляторы, классификация. Виды регулирующих органов
| 36
|
| 17
| Структура программируемых логических контроллеров
| 45
|
| 18
| Модули ввода/вывода
| 47
|
| 19
| Требования к интерфейсным связям МПСА (RS-232/485)
| 50
|
| 20
| Протокол Modbus, сеть Modbus Plus
| 56
|
| 21
| Структура ввода/вывода программируемых логических контроллеров
| 58
|
| 22
| Аппаратная реализация системы горячего резервирования Диагностика системы горячего резервирования
| 66
|
| 23
| Основы программирования
| 69
|
Объемы и схемы автоматизации МНА и ПНА
Общий перечень параметров контроля состояния МНА (ПНА) и порядок работы защит приведен в таблице 1.
Таблица 1 Перечень аварийных защит МНА, действия СА и технологического оборудования
| № п\п
| Параметры контроля и защиты
| Величины уставок согласно НД
| Выдержка времени на отключен.МНА, с
| Остановка агрегата
| Закрытие агрегатн. задвижек
| АВР МНА
|
| 1.
| Аварийная максимальная температура корпуса насоса
| 60 0С
| 1
| +
| -
| -
|
| 2.
| Аварийная максимальная температура подшипников насоса, ЭД
| На 5 0С
меньше
указан.
зав. изг.
| 1
| +
| -
| +
|
| 3.
| Аварийные утечки нефти через торцевое уплотнение
| Зав. изг.
| 1
| +
| +
| -
|
| 4.
| Аварийная максимальная вибрация. Порог 1.
| 7,1 мм/с
| 10
| +
| -
| +
|
| 5.
| Аварийная максимальная вибрация. Порог 2.
| 18,0 мм/с
| 2
| +
| -
| +
|
| 6.
| Аварийное осевое смещение ротора насоса
| +/- 1,0 мм
| 1
| +
| +
| +
|
| 7.
| Аварийное минимальное давление масла
| 25 кПа
| 3
| +
| +
| +
|
| 8.
| Неисправность, в т.ч. отсутствие питания вторичных приборов защит МНА
| ---
| 10
| +
| -
| +
|
| 9.
| Электрическая защита электродвигателя
| ---
| 3
| +
| -
| +
|
| 10.
| Закрытие агрегатных задвижек работающего агрегата
| ---
| 60
| +
| -
| +
|
| 11.
| Невыполнение программы пуска агрегата
| ---
| 0
| +
| -
| +
|
| 12.
| Несанкционированное отключение МНА
| ---
| 3
| +
| -
| -
|
| 13.
| Несанкционированное включение МНА
| ---
| 0
| +
| -
| -
|
| 14.
| Неисправность цепей контроля МНА
| ---
| 0
| +
| -
| +
|
| 15.
| Аварийное отключение агрегата кнопкой «Стоп»: по месту, с БРУ
| ---
| 0
| +
| +
| -
|
| 16.
| Отключение агрегата:
с АРМ диспетчера, по команде ЦСПА
| ---
| 0
| +
| -
| -
|
Алгоритм функционирования агрегатной защиты МНА (ПНА) должен предусматривать:
- автоматическое отключение привода МНА (ПНА);
- автоматическое закрытие задвижек на входе и выходе МНА (ПНА) (при наличии требования);
- АВР (при наличии требования).
Формирование автоматической команды на закрытие задвижек на входе и выходе МНА (ПНА) по агрегатным защитам выполняется только после подтверждения остановки МНА (ПНА).
Пуск насосного агрегата, находящего в состоянии «горячий резерв» при выполнении АВР, должен осуществляться:
- для ПНА - одновременно с подачей команды остановки неисправного ПНА;
- для ПНА нефтеналивных/нефтепродуктоналивных терминалов - после получения подтверждения отключения неисправного ПНА;
- для МНА - после получения подтверждения отключения неисправного МНА.
Требования к согласованности аварийных отключений объектов МН.
Для исключения возможности формирования противоречащих автоматических команд управления для одного и того же технологического оборудования в результате одновременной работы нескольких алгоритмов, МПСА НПС должна выполнять алгоритмы в порядке приоритета.
Приоритеты работы алгоритмов определены в следующей убывающей последовательности:
- защиты, предусматривающие одновременную остановку всех работающих МНА;
- защиты, предусматривающие последовательную остановку всех работающих МНА;
- защиты, предусматривающие остановку одного (первого по потоку нефти/нефтепродукта) из работающих МНА;
- остальные защиты и алгоритмы.
Программы пуска МНА и ПНА.
Пуск насосного агрегата (МНА, ПНА) оператором НПС, диспетчером управляющего РДП (ТДП) всегда производится по соответствующей программе пуска. В МПСА НПС должны быть реализованы следующие программы пуска:
- программа пуска №1 (П1) на полностью открытую выходную задвижку;
- программа пуска №2 (П2) на закрытую выходную задвижку, открывающуюся в ходе выполнения программы.
Для программного пуска
- МНА с регулируемой частотой вращения вала,
- МНА, находящегося в режиме «резервный»,
- ПНА
должна применяться только программа пуска №1.
МПСА НПС не должна допускать изменение программы пуска во время работы программы пуска или программы остановки МНА.
При выполнении пуска по программе №1 первого по счёту МНА без регулирования частоты вращения вала (запуск после остановки МНС), МПСА НПС предварительно перед подачей команды включения привода агрегата, должна формировать команду на прикрытие исполнительных механизмов САР (работает рамповая функция).
При выполнении пуска по программе №2 команда на включение ВВ двигателя МНА подается с выдержкой времени от момента подачи команды на открытие агрегатной задвижки на выходе МНА. Длительность выдержки времени должна быть принята из расчета величины допустимого перепада давления на выходной агрегатной задвижке.
Управление агрегатами вспомогательных систем зависит от режима работы.
Таблица 4 Управление агрегатами вспомогательных систем
|
Режим
| Кнопка по месту
| АРМ оператора
| МПСА автоматически
|
| пуск
| стоп
| пуск
| стоп
| пуск
| стоп
|
| Основной
Резервный
Ручной
Ремонтный
| +
+
+
-
| +
+
+
+
| +
+
-
-
| +
+
+
+
| +
+
-
-
| +
+
+
+
|
Режим «ручной» - наладочный режим, предназначенный для проверки работы цепей контроля магнитного пускателя, цепей контроля оперативного напряжения или проверки уставок датчика давления. Дистанционный пуск агрегата (автоматический или по командам оператора) заблокирован. Разрешён пуск по месту.
Режим «ремонтный»устанавливается автоматически по результатам невыполнения команд управления или по результатам неудовлетворительного контроля текущего состояния агрегата, находившегося не в ручном режиме. Может быть установлен оператором.
Режим «резервный» - автоматический режим, предназначен для АВР. Разрешён автоматический пуск, пуск по команде оператора, пуск по месту.
Требования к алгоритмам работы приточно-вытяжной вентиляции помещения насосного зала.
Управление работой систем вентиляции помещения насосного зала в зависимости от уровня загазованности выполняется по следующему алгоритму:
1. Нормальный уровень загазованности ниже 10% НКПРП:.
- вытяжные вентиляторы (основной и резервный) отключены;
- приточные вентиляторы (основной и резервный) отключены.
2. Уровень загазованности больше 10% НКПРП:
- вытяжной вентилятор в режиме основной включается;
- для возмещения расхода воздуха открываются либо жалюзи, либо воздушные клапаны, либо включается приточный вентилятор в режиме основной.
3. Уровень загазованности 10% сохраняется больше 10 минут или 30% НКПРП:
- при работающем вытяжном вентиляторе в режиме основной, дополнительно автоматически включается вытяжной вентилятор в режиме резервный;
- приточный вентилятор работает без изменений.
4. Загазованность упала и стала ниже 10% НКПРП (с выдержкой времени 15 минут):
- выключаются работающие вытяжные вентиляторы;
- отключается работающий приточный вентилятор, если он не был задействован в регулировании температуры воздуха в насосном зале.
Требования к функциям управления агрегатами маслосистемы.
В системе подачи масла к подшипниковым узлам насосных агрегатов должен быть обеспечен следующий объём автоматизации:
- измерение температуры масла в трубопроводе подачи масла к МНА;
- измерение давления масла на выходе каждого маслонасоса;
- измерение давления масла у каждого магистрального насосного агрегата;
- измерение перепада давления масла на узле маслофильтров;
- измерение уровня масла в баках маслосистемы;
- сигнализация предельной температуры масла в трубопроводе подачи масла к МНА;
- сигнализация минимального давления масла на выходе каждого маслонасоса;
- сигнализация минимального давления масла у каждого МНА;
- сигнализация аварийного максимального, предельного максимального и минимального уровня в баках централизованной маслосистемы;
- сигнализация аварийного минимального, предельного минимального и максимального уровня в баке индивидуальной маслосистемы;
- сигнализация аварийного минимального, предельного минимального, максимального уровня в аккумулирующем баке маслосистемы.
МПСА подаёт команды на включение и отключение АВО в зависимости от температуры масла.
1) Температура масла ниже +10С – (без выдержки времени) блокировка пуска МНА.
2) Температура масла ниже +25С – (с выдержкой времени 5 с) отключение работающих АВО.
3) Температура масла выше +35С – (с выдержкой времени 5 с) включается АВО в режиме основной.
4) Температура масла выше +45С – (с выдержкой времени 5 с) дополнительно к работающему АВО в режиме основной, автоматически включается АВО в режиме резервный.
5) Температура масла выше +55С – (без выдержки времени) оперативное сообщение в РДП, ТДП.
Требования к функциям управления системой откачки утечек и ССВД
МПСА подаёт команды на включение и отключение насосов откачки утечек в зависимости от уровня нефти в емкости сбора утечек (ЕП-40):
1) Минимальный уровень 200мм выше приёмного патрубка насоса в ёмкости – с выдержкой времени 3сек. отключение работающих насосов.
2) Предельный максимальный уровень 500мм от верхней образующей ёмкости – выдержка времени 3сек. включение насоса в режиме основной, если уровень не снижается, то через 60 секунд дополнительно включается насос в режиме резервный.
3) Аварийный максимальный уровень 250мм от верхней образующей ёмкости – с выдержкой времени 3сек. дополнительно к насосу в режиме основной включается насос в режиме резервный.
Должна быть предусмотрена блокировка пуска насоса и отключение работающего насоса, выполняющего откачку нефти на прием магистральной насосной, в случаях:
- если давление в точке подключения к МТ насоса откачки превышает давление, создаваемое насосом откачки;
- закрытия задвижек между точкой подключения насоса откачки и линейной частью МТ (задвижки на входе МНС, на выходе МНС, на ФГУ, на узле РД, на входе НПС, на выходе НПС).
Контроль аварийного максимального уровня в емкостях сбора утечек и в емкостях ССВД на НПС должен производиться с помощью отдельно смонтированного на каждой емкости сигнализатора уровня. Для контроля минимального и предельного максимального уровня, а также текущего уровня должен быть использован датчик уровня. Контроль аварийного максимального уровня должен быть дополнен контролем обрыва и короткого замыкания линии.
Методы связи КИП с МПСА
Для связи КИП с МПСА используются различные методы по передачи информации в зависимости от видов используемых сигналов.
Виды сигналов:
а) Дискретный сигнал.
Используется двухпроводная схема подключения с применением медного многожильного кабеля, площадь поперечного сечения до 2.5 мм2.
б) Аналоговый сигнал (Это сигнал, который постоянно меняется с течением времени) 0-5В, 0-20В, 0-5мА, 4-20мА.
Используется 2х, 3х, 4х проводная схема подключения с применением медного многожильного кабеля, площадь поперечного сечения до 2.5 мм2. (длина кабеля линии связи для аналогового входного сигнал составляет не более 200м, а для выходного сигнала - 500м).
Равновесный мост используется в метрологии для поверки ТСМ и ТСП. Неравновесный мост используется в КИП для преобразования измеряемого параметра в электрический сигнал, который линейно изменяется при линейном изменении измеряемого параметра.
Требования к разделению цепей при прокладке кабелей
Прокладка кабелей систем автоматизации и телемеханизации по территории и помещениям площадочных и линейных объектов МТ должна выполняться в металлических коробах по кабельным и совмещенным эстакадам, по конструкциям зданий, в каналах, туннелях, по фундаментам машин, в шахтах, кабельных этажах и двойных полах.
Примечание: При наличии существующих кабельных линий, проложенных в земле, в объёмах реконструкции или капитального ремонта соответствующего объекта МТ следует предусматривать прокладку новых и вынос существующих кабельных линий на эстакады. При повреждении существующих кабельных линий, проложенных в земле, не допускается устранение повреждения методом установки соединительной муфты в земле. В этом случае кабельная линия должна быть полностью заменена на новую линию, или отремонтирована путём надземной установки клеммной коробки.
Все кабели должны иметь бирки с указанием:
- номера кабеля по кабельному журналу;
- типа кабеля с указанием жильности;
- адресности кабеля «откуда – куда» (по позиционному обозначению оборудования).
Все кабели систем автоматизации и телемеханизации (в том числе кабели питания) должны быть экранированные. Все контрольные кабели от исполнительных механизмов до систем автоматизации и телемеханизации (в том числе на участке между исполнительным механизмом и ЩСУ) должны быть экранированные.
Экранирующую оплетку кабеля необходимо заземлять в одной точке в соответствии с требованиями, изложенными в РД-91.020.00-КТН-021-11
Кабели систем автоматизации и телемеханизации подразделяются на группы в зависимости от назначения:
а) кабели интерфейсной связи СА, ТМ (оптоволокно);
б) кабели интерфейсной связи систем пожаротушения (оптоволокно);
в) кабели питания СА, ТМ 220 В переменного тока, кабели управления и сигнализации СА, ТМ 220 В переменного и постоянного тока;
г) кабели питания СА систем пожаротушения 220 В переменного тока, кабели управления и сигнализации СА систем пожаротушения 220 В переменного и постоянного тока;
д) кабели питания СА, ТМ 24 В постоянного тока, кабели управления и сигнализации СА, ТМ 24 В постоянного тока (в том числе ИБЦ), кабели с аналоговыми сигналами СА, ТМ (в том числе ИБЦ), кабели интерфейсной связи СА, ТМ (витая пара, коаксиальный кабель) (в том числе ИБЦ);
е) кабели питания систем пожаротушения 24 В постоянного тока, кабели управления и сигнализации систем пожаротушения 24 В постоянного тока (в том числе ИБЦ), кабели с аналоговыми сигналами систем пожаротушения (в том числе ИБЦ), кабели шлейфов пожарных извещателей, оповещателей, кабели интерфейсной связи систем пожаротушения (витая пара, коаксиальный кабель) (в том числе ИБЦ).
Кабели каждой группы следует прокладывать в отдельном коробе с соблюдением приведенных в таблице 2 расстояний между группами.
Таблица 6 Минимальные расстояния между группами кабелей различного назначения
| Расстояния между группами кабелей, мм
| Высоковольтные кабели
| Силовые кабели ~220 В, ~380 В
| Кабели группы а)
| Кабели группы б)
| Кабели группы в)
| Кабели группы г)
| Кабели группы д)
| Кабели группы е)
|
| Высоковольтные кабели
|
| н/н
| 250
| 250
| 250
| 250
| 400
| 400
|
| Силовые кабели ~ 220 В, ~380 В
| н/н
|
| н/н
| н/н
| 100
| 100
| 250
| 250
|
| Кабели группы а)
| 250
| н/н
|
| н/н
| н/н
| н/н
| н/н
| н/н
|
| Кабели группы б)
| 250
| н/н
| н/н
|
| н/н
| н/н
| н/н
| н/н
|
| Кабели группы в)
| 250
| 100
| н/н
| н/н
|
| н/н
| 100
| 100
|
| Кабели группы г)
| 250
| 100
| н/н
| н/н
| н/н
|
| 100
| 100
|
| Кабели группы д)
| 400
| 250
| н/н
| н/н
| 100
| 100
|
| н/н
|
| Кабели группы е)
| 400
| 250
| н/н
| н/н
| 100
| 100
| н/н
|
|
| н/н - расстояние не нормируется данной таблицей
|
Для организации каналов передачи данных между контроллерами, системами автоматизации и телемеханизации с интерфейсными выходами при длине линии связи более 100 м рекомендуется использовать оптоволоконные кабели.
Методы регулирования давления. Требования РД к регулированию
Регулирование может выполняться одним из методов:
- изменением положения исполнительного механизма регулирующей арматуры;
- изменением частоты вращения вала насоса МНА за счет изменения коэффициента передачи через гидромуфту от вала электродвигателя МНА с постоянной частотой вращения;
- изменением частоты вращения вала насоса МНА (ПНА) за счет изменения частоты вращения вала электродвигателя МНА (ПНА).
Время перемещения исполнительного механизма из одного крайнего положения в другое (0 – 100 % закрытия) для систем автоматического регулирования давления МНС должно находиться в диапазоне от 8 до 25 с, в зависимости от диаметра трубопровода:
- для трубопровода DN 1200 в диапазоне 8 – 10 секунд;
- для трубопровода DN 1000 в диапазоне 12 – 15 секунд;
- для трубопровода DN 800 и менее в диапазоне 20 – 25 секунд
В САР давления методом дросселирования должен быть предусмотрен алгоритм временного прикрытия исполнительных механизмов, перед запуском по программе №1 первого по счёту МНА без регулирования частоты вращения вала, с возвратом в режим регулирования давления после запуска МНА. Прикрытие исполнительных механизмов САР осуществляется с применением рамповой функции САР.
Критерии качества САР
Состояние равновесия – это состояние когда регулируемая величина (давление) остается неизменной во времени (установившийся режим).
Возмущение – это событие, которое приводит к изменению регулируемой величины (переход с МНА на МНА, АВР).
Переходным процессом называют процесс регулирования, когда изменение регулируемой величины во времени в результате действия возмущения и вызванное этим возмущением действие регулятора. Это переход из одного равновесного состояния в другое.
Если система автоматического регулирования, будучи выведена из состояния равновесия, вновь приходит в равновесное состояние, то ее называют устойчивой. Если САР при этих условиях не может достичь равновесного состояния, то ее называют неустойчивой. Ее переходный процесс имеет вид периодических колебаний с постоянной или возрастающей амплитудой. Устойчивость САР – это основной показатель и необходимое условие работоспособности.
Для оценки характеристики переходного процесса и его качества используются следующие динамические показатели:

Рисунок 9 Переходный процесс
1. Перерегулирование – величина максимального отклонения ∆ Х1 регулируемой величины от установившегося значения Хуст.
2. Время регулирования – это время между началом возмущения и концом переходного процесса tр, за окончание которого принимается время, начиная с которого регулируемая величина изменяется в пределах заданного диапазона отклонения Е.
3. Установившаяся ошибка б характеризует точность регулирования и есть разность между заданным значением и установившимся.
4. Частота колебаний (период колебаний Тр) определяется числом колебаний за единицу времени.
5. Затухание колебательных процессов характеризуется интенсивностью уменьшения амплитуды отклонения.
Затухание колебательных процессов – численно определяется логарифмическим декрементом затухания, т. е. это логарифм отношения наибольшей амплитуды отклонения к амплитуде следующего отклонения того же знака.
Вывод: Система регулирования будет идеальной, если она будет точно поддерживать или повторять заданную величину без переходных процессов. Для оценки качества переходного процесса используются динамические показатели.
Качество САР будет тем выше, чем меньше перерегулирование, короче время регулирования, меньше установившаяся ошибка, меньше частота колебаний и больше затухание колебательных процессов.
Система регулирования является замкнутой системой, так как изменение состояния любого параметра объекта или регулятора приводит к изменению всей системы в целом. Отсюда следует, что вся система в целом будет работать устойчиво при условии, когда динамические свойства регулятора будут соответствовать динамическим показателямм объекта, т.е. параметры регулятора настраиваются для работы конкретной НПС.
Пропорциональный регулятор
П-регулятор, у которого изменение выходной величины ∆Х вых. пропорционально изменению входной величины ∆Х вход.
∆Х вых = Кр * ∆Х вход ,
где Кр - параметр настройки регулятора, коэффициент пропорциональности, коэффициент усиления.
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид,

Рисунок 10
где К1 < К2 < К3
Пропорциональные регуляторы имеют несложную конструкцию, просты в настройке и эксплуатации, поэтому они нашли широкое применение в промышленности. Однако их применение не всегда обеспечивает достаточное качество процесса регулирования.
Примеры: механизмы системы рычагов, блоков, шестеренок, гидравлический пресс, метод перепуска, трансформаторы, электрическое сопротивление в отрицательной обратной связи.
Интегральный регулятор
И-регулятор, у которого изменение выходной величины ΔХвых. пропорционально интегралу от изменения входной величины ΔХвх. :
ΔХвых.= (1/Ти) * ∫ΔХвх.dt,
где Ти-параметр настройки регулятора, время интегрирования, время изодрома.
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид,
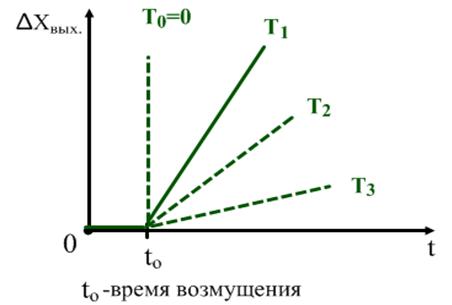
Рисунок 11
где T1 < T2 < T3
И-регуляторы обеспечивают высокую статическую точность, однако динамические показатели САР с применением таких регуляторов в значительной мере зависят от значений настроечного параметра Ти.
При увеличении Ти динамические процессы регулирования становятся более плавными (Т3), однако возрастает время регулирования, и система медленно устраняет возникающие отклонения.
С уменьшением Ти время регулирования уменьшается, но появляется колебательность, декремент затухания уменьшается, и процесс может стать неустойчивым.
Примеры: амортизаторы, работа насоса с подключенной ёмкостью на выходе, конденсатор.
Виды регулирующих органов
Непосредственное регулирующее воздействие оказывает исполнительное устройство. В нём происходит преобразование сигналов, поступающих от САР (блок селекции сигналов) в механическое движение. Исполнительное устройство состоит из двух основных частей: исполнительного механизма (привод) и регулирующего органа (заслонка).

Привод должен обеспечивать достаточное перемещение регулирующего органа поступательное или вращательное. Он должен развивать достаточное усилие, а также преодолевать воздействие сил трения при перемещении регулирующего органа и перепад давления. Привод должен перемещать затвор с достаточной скоростью. В зависимости от вида энергии исполнительные механизмы делятся на: пневматические, гидравлические, электрические, ручные, комбинированные.
Регулирующий орган – это часть исполнительного устройства, помещенного в трубопровод для создания переменного гидравлического сопротивления.
Для регулирования давления в трубопроводах больших диаметров используются ПРЗ (поворотно-регулирующая заслонка). В ПРЗ проходное сечение меняется при повороте диска, сидящего на оси перпендикулярной направлению потока жидкости.
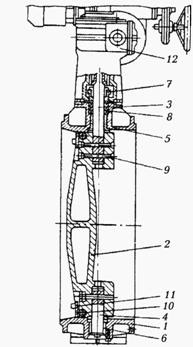
Рисунок 15 Поворотно-регулирующая заслонка с электрическим исполнительным механизмом и ручным дублером
1-корпус; 2-диск; 3-вал; 4-ось; 5и6-опоры; 7- нажимной фланец; 8-уплотнительные кольца; 9-штифт; 10-резиновое кольцо;
11-прижимное кольцо; 12-ручной дублер
Конструкция ПРЗ представляет собой корпус (1) в виде кольца небольшой ширины, которое зажимается между фланцами трубопровода. Внутри кольца находится диск (2). Из-за неравномерного распределения скоростей жидкости на диск действует крутящий момент со стороны потока жидкости, который стремится повернуть его и закрыть проходное сечение трубопровода. Для снижения крутящего момента устанавливают специальный профилированный диск. Для более пропорционального регулирования давления на больших углах поворота на диск устанавливают «рыбий» хвост, который также снижает крутящий момент.
Электропривод перемещает диск при помощи электродвигателя через редуктор. Управление осуществляется специальным блоком. После перемещении диска до требуемого положения подача напряжения на обмотки электродвигателя прекращается. Диск в заданном положении останавливается электромагнитным тормозом и удерживается исполнительным механизмом.
Модули ввода/вывода
Модуль аналогового ввода
Таблица 8 Основные характеристики модуля аналогового ввода
| Число каналов
| 16 дифференциальных или однополярных
|
| Светодиоды
| Activе
F
Примечание: этот модуль формирует сигнал F, если в любом канале обнаружен обрыв линии (для 4…20 мА)
|
Модуль аналогового вывода
Модуль аналогового токового вывода на 4 канала выдает и позволяет контролировать управляющие токовые сигналы в диапазоне 4…20 мА.
Таблица 9 Основные характеристики модуля аналогового вывода
| Число каналов
| 4
|
| Светодиоды
| Activе
F
1…4 (зеленые)
1…4 (красные)
Примечание – когда зеленый индикатор канала погашен, выходной ток для него 0 мА.
|
Модуль дискретного ввода
Таблица 10 Основные характеристики модуля дискретного ввода
| Число каналов
| 32 входа (4 группы по 8)
|
| Светодиоды
| Activе 1…32
(зеленый) – индикация состояния каналов
|
Требования к интерфейсным связям МПСА
RS-232 (Recommended Standard) — стандарт последовательной асинхронной передачи двоичных данных между терминалом (Data Terminal Equipment, DTE) и коммуникационным устройством (Data Communications Equipment, DCE).
Характеристики
RS-232 — интерфейс передачи информации между двумя устройствами (только 2 узла) на расстоянии до 15 метров. Информация передается по проводам цифровым сигналом с двумя уровнями напряжения. Логическому "0" соответствует положительное напряжение (от +5 до +15 В для передатчика), а логической "1" отрицательное (от -5 до -15 В для передатчика). Асинхронная передача данных осуществляется с фиксированной скоростью.
Принцип работы
Передающая сторона по очереди выдает в линию «0» и «1», а принимающая отслеживает их и запоминает. Данные передаются пакетами по одному байту (обычно 8 бит). Вначале передаётся стартовый бит, противоположной полярности состоянию незанятой линии, после чего передаётся непосредственно кадр полезной информации, от 5 до 8 бит.
Увидев стартовый бит, приемник выжидает интервал T1 и считывает первый бит, потом через интервалы T2 считывает остальные информационные биты. Последний бит — стоповый бит (состояние незанятой линии), говорящий о том, что передача завершена. Возможно 1, 1,5 или 2 стоповых бита.
В конце байта, перед стоп битом, может передаваться бит чётности (parity bit) для контроля качества передачи. Он позволяет выявить ошибку в нечетное число бит (используется, так как наиболее вероятна ошибка в 1 бит).
Расстояния передачи
Длина кабеля влияет на максимальную скорость передачи информации. Более длинный кабель имеет большую емкость и соответственно для обеспечения надежной передачи более низкую скорость.
Таблица 12
| Скорость [бод]
| Макс. длина [футы]
| Макс. длина [метры]
|
| 19 200
| 50
| 15
|
| 9 600
| 500
| 150
|
| 4 800
| 1000
| 300
|
| 2 400
| 3000
| 900
|
Контроль четности
При передаче по последовательному каналу контроль четности может быть использован для обнаружения ошибок при передаче данных. При использовании контроля четности посылаются сообщения подсчитывающие число единиц в группе бит данных. В зависимости от результата устанавливается бит четности. Приемное устройство также подсчитывает число единиц и затем сверяет бит четности.
Для обеспечения контроля четности компьютер и устройство должны одинаково производить подсчет бита четности. То есть, определиться устанавливать бит при четном (even) или нечетном (odd) числе единиц. При контроле на четность биты данных и бит четности всегда должны содержать четное число единиц. В противоположном случае соответствует для контроля на нечетность.
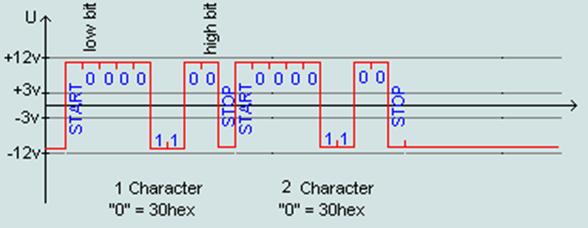
Рисунок 18 Показана передача символов "0" "1" без паритета, с одним стоповым битом
На рисунке 18 хорошо видно, что стоповый бит разделяет два переданных символа. При необходимости можно увеличить этот интервал до 2 стоповых битов, если конечное устройство не успевает разделять символы.
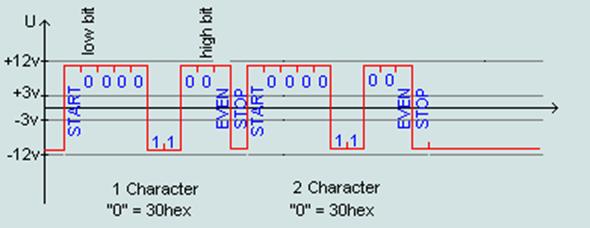
Рисунок 19 Показана передача символов "0" "1" с проверкой на четность (EVEN), с одним стоповым битом
RS-485 — стандарт физического уровня для асинхронного интерфейса. Регламентирует электрические параметры полудуплексной многоточечной дифференциальной линии связи типа «общая шина».
Стандарт приобрел большую популярность и стал основой для создания целого семейства промышленных сетей.
Характеристики
Таблица 13
| Физическая среда
| Витая пара
|
| Максимальное количество устройств
| 32 - 256 устройств (32 нагруженных)
|
| Максимальное расстояние
| 1200 метров
|
| Максимальная скорость передачи
| 10 Мбит/с
|
| Напряжение
| -5 В до +5 В
|
| (1)
| Положительное напряжение (A-B > +200 мВ)
|
| (0)
| Отрицательное напряжение (A-B < -200 мВ)
|
Принцип работы RS-485.
Так как стандарт, RS-485 описывает только физический уровень процедуры обмена данными, то все проблемы обмена, синхронизации и квитирования, возлагаются на более высокий протокол обмена (ModBus, ModBus+ и т.п.).
Сам RS-485 выполняет только следующие действия:
1. Преобразует входящую последовательность "1" и "0" в дифференциальный сигнал.
2. Передает дифференциальный сигнал в симметричную линию связи.
3. Подключает или отключает передатчик драйвера по сигналу высшего протокола.
4. Принимает дифференциальный сигнал с линии связи.
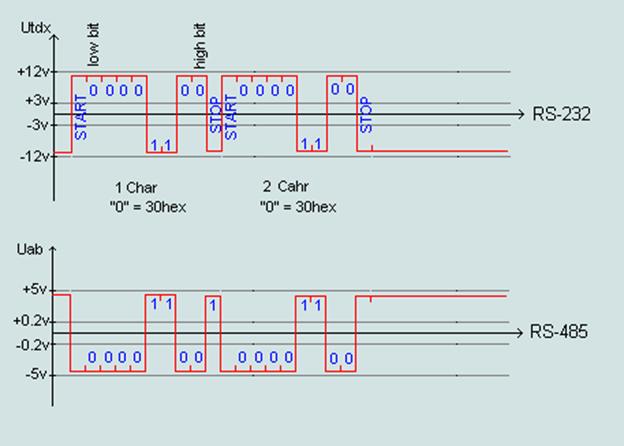
Рисунок 20 Форма сигналов RS-232 и RS-485 при передаче двух символов "0" и "1".
Как видно из рисунка 20 происходит простое преобразование уровней сигнала по напряжению. Хотя форма сигналов одинаковая у выше указанных стандартов, но способ их формирования и мощность сигналов различны.
Рисунок 21 Формирование сигналов RS-485 и RS-232
Преобразование уровней сигналов и новый способ их формирования позволил решить ряд проблем, которые в своё время не были учтены при создании стандарта RS-232.
Недостатки RS-485
1. Большое потребление энергии.
2. Отсутствие сервисных сигналов.
3. Возможность возникновения коллизий.
LIO -сеть
Л окальный ввод-вывод – это сеть, в которой контроллер центральный и модули ввода-вывода размещены в одной корзине на общей шине (шкаф ТМ).
ОШ
Рисунок 23 Структура LIO - сети
Преимущества:
1. Высокая скорость опроса датчиков (за 5 мс).
Недостатки:
1. Ограничение в количестве модулей ввода/вывода (до 14 шт.)
2. При размещении датчиков и ИМ на технологической площадке длина линий связи может быть не более 200 м.
RIO -сеть