Памятка судоводителю
по использованию судовой РЛС и САРП
для расхождения с судами
Конспект лекций
г. Измаил – 2006
Вилен Николаевич Виноградов, капитан дальнего плавания
Памятка судоводителю по использованию судовой РЛС и САРП для расхождения с судами: конспект лекций, учебное пособие,
2006г. — 76 стр.: ил.
Настоящее пособие предназначено для судоводителей морских судов. Может быть использовано слушателями курсов РЛТ и САРП в качестве учебного пособия.
Рецензент: капитан дальнего плавания
Владимир Федорович Столбовский.
Оригинал-макет — В. В. Умбеталиев.
Морской тренажерный центр
г. Измаил, ул. Куликова, 31
тел./факс (+38) (04841) 20362.
Приложение 1.
| Объекты
| D, мили
|
| Суда
Мелкие катера и шлюпки
Малые деревянные суда Суда водоизмещением 20
Траулеры (100 -150 т) Суда водоизмещением 1 тыс. т
— 10 тыс. т
— 50 тыс. т
Буи
Малые
Средние
Большие
С пассивными отражателями
|
1-1.5
1-4
4-6
6-9
6-10
10-16
16-20
1-2
2-3
3-4 6-8
|
Приложение 2. В ЛИЯНИЕ ПОМЕХ ОТ ВОЛНЕНИЯ НА РАДИОЛОКАЦИОННОЕ ОБНАРУЖЕНИЕ РАЗЛИЧНЫХ ПЛАВСРЕДСТВ.
| Скорость ветра, м/с
| Состояние моря
| Обнаружение объектов
|
|
|
|
|
| 0
| Штиль.
| Нормальное.
|
| 1-2,5
| Небольшие, но четко выраженные волны без пены.
| Нормальное.
|
| 4,5
| Более крупные волны, начинающиеся рассыпаться пеной.
| Эхо-сигналы от малых (беспалубных) судов иногда теряются в засветке от волнения или могут быть обнаружены на очень малом расстоянии.
|
| 6,5
| Небольшие волны с многочисленными белыми барашками.
| Малые суда обычно теряются, но суда больших размеров, как правило, продолжают обнаруживаться.
|
| 8,5
| Волны умеренной высоты с разбивающимися гребнями.
| Большая часть рыболовных и небольших транспортных судов перестают обнаруживаться, как только их эхо-сигналы войдут в зону помех от волнения; часто они обнаруживаются на малом расстоянии. Океанские траулеры и транспортные суда средних размеров обычно хорошо обнаруживаются.
|
| 11
| Длинные волны с раз- бивающимися гребнями.
| Океанские траулеры и транспортные суда средних размеров обычно перестают обнаруживаться. Большие транспортные суда продолжают обнаруживаться полностью.
|
| 14
| Сильное волнение с на- чинающими образовы- ваться полосами пены.
| Большие транспортные суда обычно не обнаруживаются в зоне помех, за исключением случаев, когда они находятся в ракурсе, особо
выгодном в радиолокационном отношении.
|
| 17
| Сильное волнение с разбивающимися гребнями и с начинающей по- дыматься водяной пылью.
| Только самые большие океанские суда с развитыми надстройками надежно обнаруживаются на, всех шкалах в пределах обычных для них дальностей обнаружения независимо от ракурса.
|
МППСС-72, связанные с использованием судовых РЛС
МЕЖДУНАРОДНЫЕ ПРАВИЛА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИИ
СУДОВ В МОРЕ 1972 (МППСС-72)
(Извлечения)
ЧАСТЬ А - ОБЩИЕ ПОЛОЖЕНИЯ
Правило 1.
Применение.
Настоящие Правила распространяются на все суда в открытых морях и соединенных с ними водах, по которым могут плавать морские суда.
Ничто в настоящих Правилах не должно служить препятствием к действию особых правил, установленных соответствующими властями относительно плавания на акваториях рейдов, портов, на реках, озерах или по внутренним водным путям, соединенным с открытым морем, по которым могут плавать морские суда.
Правило 2.
Ответственность.
Ничто в настоящих Правилах не может освободить ни судно, ни его владельца, ни капитана, ни экипаж от ответственности за последствия, могущие произойти от невыполнения этих Правил или от пренебрежения какой либо предосторожностью, соблюдение которой требуется обычной морской практикой или особыми обстоятельствами данного случая.
При толковании и применении этих Правил следует обращать должное внимание на всякого рода опасности плавания и опасность столкновения и на все особые обстоятельства, включая особенности самих судов, которые могут вызвать необходимость отступить от этих Правил для избежания непосредственной опасности.
Правило 3.
Общие определения.
В настоящих Правилах, когда по контексту не требуется иного толкования:
Термин «ограниченная видимость» означает любые условия, при которых видимость
ограничена из-за тумана, мглы, снегопада, сильного ливня, песчаной бури или по каким-либо другим подобным причинам.
ЧАСТЬ В - ПРАВИЛА ПЛАВАНИЯ И МАНЕВРИРОВАНИЯ.
Раздел 1 - Плавание судов при любых условиях видимости.
Правило 4.
Применение.
Правила этого раздела применяются при любых условиях видимости.
Правило 5.
Наблюдение.
Каждое судно должно постоянно вести надлежащее визуальное и слуховое наблюдение, так же как и наблюдение с помощью всех имеющихся средств, применительно к преобладающим обстоятельствам и условиям, с тем, чтобы полностью оценить ситуацию и опасность столкновения.
Правило б.
Безопасная скорость.
Каждое судно должно всегда следовать с безопасной скоростью, с тем, чтобы оно могло предпринять надлежащее и эффективное действие для предупреждения столкновения и могло быть остановлено в пределах расстояния, требуемого при существующих обстоятельствах и условиях.
При выборе безопасной скорости следующие факторы должны быть в числе тех, которые надлежит учитывать:
а.) Всем судам:
1.) состояние видимости;
2.) плотность движения, включая скопление рыболовных или любых других судов;
3.) маневренные возможности с/дна и особенно расстояние, необходимое для полной остановки судна, и поворотливость судна в преобладающих условиях;
4.) ночью — наличие фона освещения, как от береговых огней, так и от рассеяния света собственных огней;
5.) состояние ветра, моря и течения и близость навигационных опасностей;
6.) соотношение между осадкой и имеющимися глубинами.
7.) дополнительно судам, использующим радиолокатор:
8.) характеристики, эффективность и ограничения радиолокационного оборудования;
9.) любые ограничения, накладываемые используемой радиолокационной шкалой дальности;
10.) влияние на радиолокационное обнаружение состояния моря и метеорологических факторов, а также других источников помех;
11.) возможность того, что радиолокатор может не обнаружить на достаточном расстоянии малые суда, лед и другие плавающие объекты;
12.) количество, местоположение и перемещение судов, обнаруженных радиолокатором;
13.) более точную оценку видимости, которая может быть получена при радиолокационном измерении расстояния до судов или других объектов, находящихся поблизости.
Правило 7.
Опасность столкновения.
а.) Каждое судно должно использовать все имеющиеся средства в соответствии с преобладающими обстоятельствами и условиями для определения наличия опасности столкновения. Если имеются сомнения в отношении наличия опасности столкновения, то следует считать, что оно существует.
б.) Установленное на судне исправное радиолокационное оборудование должно использоваться надлежащим образом, включая наблюдение на шкалах дальнего обзора с целью получения заблаговременного предупреждения об опасности столкновения, а также радиолокационную прокладку или равноценное систематическое наблюдение за обнаруженными объектами.
в.) Предположения не должны делаться на основании неполной информации, и особенно радиолокационной.
г.) При определении наличия опасности столкновения необходимо прежде всего учитывать следующее:
1.) опасность столкновения должна считаться существующей, если пеленг приближающегося судна заметно не изменяется;
2.) опасность столкновения может иногда существовать даже при заметном изменении пеленга, в частности при сближении с очень большим судном или буксиром или при сближении судов на малое расстояние.
Правило 8.
Правило 19.
Правило 35
Организация радиолокационного наблюдения. Общие положения.
Всестороннее использование РЛС—важного средства заблаговременного обнаружения других судов (объектов) и определения степени опасности столкновения — является одной из тех мер предосторожности, пренебрежение которыми может быть поставлено в вину на основании Правила 2 МППСС-72.
Радиолокационное наблюдение организуется совместно с другими видами наблюдения —зрительным и слуховым, не заменяя, а дополняя их. При ограниченной видимости организация радиолокационного наблюдения обязательна.
Радиолокационное наблюдение обязательно при ухудшении видимости, при подходе судна к области тумана или интенсивных осадков (ливень, шквал, снежные заряды, пыльные бури).
Находясь вблизи зоны ограниченной видимости, следует всегда использовать РЛС для обнаружения судов, которые могут быть в этой зоне.
Ночью, даже в условиях хорошей видимости, целесообразно использовать судовые
радиолокационные средства в прибрежных водах и при следовании районами, где возможна встреча с малыми рыболовными судами, яхтами, буровыми платформами или другими сооружениями, которые не всегда освещены надлежащим образом.
При плавании в узкостях и в районах интенсивного движения судов использование РЛС обязательно в любых условиях видимости.
Организация радиолокационного наблюдения, в том числе в условиях хорошей видимости, соответствует требованию Правила 5 МППСС-72 об использовании для наблюдения всех имеющихся средств, с тем чтобы полностью оценить ситуацию и опасность столкновения.
В сложных условиях для графической прокладки радиолокационных измерений и обработки радиолокационной информации следует привлекать свободного от вахты помощника капитана. В таких случаях является обязательным четкое распределение обязанностей судоводителей на мостике.
Радиолокационное наблюдение не освобождает судно от подачи звуковых сигналов,
предписываемых МППСС-72.
Каждое судно, в том числе использующее РЛС, должно всегда следовать безопасной
скоростью. Правило 6 МППСС-72, перечисляя факторы, которые надлежит учитывать при
выборе безопасной скорости, выделяет группу факторов, связанных с использованием РЛС.
Использование судовой РЛС с радиолокационной прокладкой на маневренном планшете или средств автоматизированной радиолокационной прокладки (САРП) позволяет:
заблаговременно обнаружить другие суда (объекты), определить их положение;
оценить степень опасности столкновения и элементы движения судов (объектов);
«проиграть» и выбрать маневр для расхождения, обосновав его необходимость,
приемлемость и своевременность в конкретной ситуации;
контролировать эффективность выбранного маневра в процессе его выполнения;
своевременно принять дополнительные меры обеспечения безопасности плавания в случае необходимости;
безопасно вернуться на заданный путь следования, т. е, действовать в соответствии с требованиями МППСС-72.
Радиолокационная прокладка.
Радиолокационная прокладка (ручная или автоматизированная) представляет собой графоаналитический метод обработки радиолокационной информации при решении задачи расхождения судов.
Различают истинную и относительную радиолокационные прокладки.
Истинная прокладка обычно выполняется на навигационной карте. От счислимых мест своего судна откладывают измеренные пеленг и дистанцию цели, получая ее одномоментные местоположения. По ним определяют курс и скорость цели, а также путем более сложных построений Dкр. и tкр. для оценки степени опасности столкновения.
Относительная прокладка выполняется на радиолокационном маневренном планшете, на накладном зеркальном планшете, которым оборудованы некоторые модели РЛС, в также во всех САРП (в САРП, как правило, в сочетании с истинной прокладкой).
Относительная прокладка выполняется следующим образом:
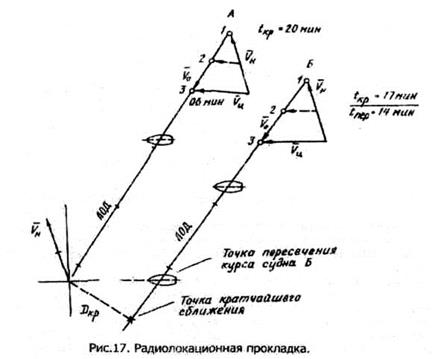
а) на маневренный планшет наносится начальная ситуация (рис. 17):
положение цели (целей) на начальный момент времени по первым измерениям пеленга и дистанции;
положение цели (целей) через избранный интервал времени (обычно 3 или 6 мин) по
вторым измерениям пеленга и дистанции и, если позволяют обстоятельства;
положение цели (целей) через тот же интервал времени по третьим измерениям пеленга и дистанции (последние измерения должны предупредить промах);
б) параллельно с нанесением начальной ситуации начинают обработку радиолокационных измерений на планшете: уже после получения первого положения цели — точки 1 наносят вектор нашей скорости VH за соответствующий период времени;
через точки 1-2-3 после их нанесения проводят ЛОД цели. Соединяют точки 1 - 3, получая вектор относительной скорости V0 — основной информационный элемент;
соединив начало вектора нашей скорости с точкой 3, определяют вектор скорости цели Уц, т. е. завершают решение векторного треугольника (векторы VH, V0 и Vц должны быть за одинаковый интервал времени);
в) получают данные для оценки ситуации: Dкp. определяют по длине перпендикуляра из центра планшета на ЛОД;
tкр. рассчитывают, откладывая по ЛОД отрезки, равные V0, так как они соответствуют
интервалу времени 1-3;
если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме, — точку пересечения нашим судном курса цели (из центра планшета проводят линию, параллельную Vц, до пересечения с ЛОД);
tnep. рассчитывают аналогично tкр. до точки пересечения курса;
курс цели Кц Определяют по направлению вектора ее скорости, а скорость цели Vц — повеличине вектора Vц;
Таблица 1.
|
1
2
3
| Т
| кн
| УН
| А
| Б
|
|
|
| п/ку
| D
| п/ку
| D
| п/ку
| D
| п/ку
| D
|
| 0610
| 345
| 16,0
| 32
| 7,3
| 48
| 7.6
|
|
|
|
|
| 0613
| 345
| 16,0
| 32
| 6,5
| 50
| 6.7
|
|
|
|
|
| 0616
| 345
| 16,0
| 32
| 5,7
| 53
| 56
|
|
|
|
|
г) получив необходимые данные и используя линейные и временные факторы опасности (см. схему на рис. 1), оценивают ситуацию: определяют, имеется ли реальная или потенциальная опасность столкновения с каждой целью, и, если опасность существует, переходят к выбору и обоснованию маневра. На этом этапе должно быть определено, с кем следует расходиться, что для этого нужно сделать и когда выполнять маневр. Выбор и обоснование маневра будут рассмотрены ниже. Пока же достаточно отметить, что при этом учитывают условия и обстоятельства конкретного случая, требования МППСС-72, закономерности перемещения эхо-сигналов на экране РЛС и маневренные элементы своего судна;
д) для расчета выбранного маневра (по судну Б на рис. 18):
наносят на ЛОД упрежденную точку 1, соответствующую условному моменту окончания маневра (12 мин.);
проводят окружность радиусом заданной дистанции кратчайшего сближения Dзад.;
прокладывают ожидаемую линию относительного движения цели (ОЛОД),
Таблица 2.
|
4
5
| т
| Кн
| VH
| А
| Б
|
|
|
| п/ку
| D
| п/к
| D
| п/ку
| D
| п/ку
| I
|
| 0619
| 345
| 16,0
| 32
| 4,9
| 56
| 5,0
|
|
|
|
|
| 0621
|
| п/Б
| курс
| 64,0
|
|
|
|
|
|
|
| 0623
| 64
| 16,0
| 28
| 4,6
| 59
| 4,6
|
|
|
|
|
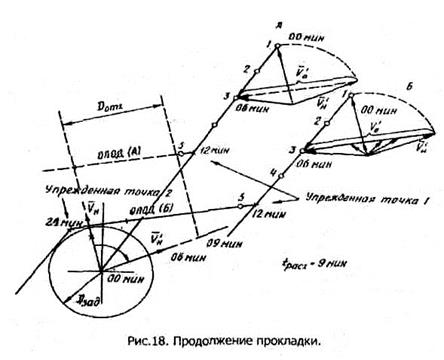
которая представляет собой касательную к окружности Dзад., проведенную из упрежденной
точки 1; из точки 3 векторного треугольника начальной ситуации проводят новое направление
вектора V’0 — оно всегда соответствует направлению ОЛОД — и делают на нем засечку
величиной VH определяя точку начала нового вектора относительной скорости V’0, новое
положение вектора VH, а также точное значение угла отворота, если выбран маневр изменением
курса.
Если же выбрано уменьшение скорости, новое значение вектора V’H определится отрезком V’H
до пересечения этого вектора с вектором V’0.
Из рис. 18 видно, что возможен и комбинированный маневр: из центра планшета проводят
новый вектор V'H, одновременно зачеркивая, чтобы не путаться, старый вектор VH;
е) пригодность рассчитанной величины маневра для расхождения с другими целями на
безопасной дистанции проверяется (на рис. 18 по судну А) следующим образом: прокладывают
новое значение V'H в векторном треугольнике каждой цели и упрежденную точку на всех ЛОД;
определяют новое значение V’0;
через упрежденную точку параллельно V’0 проводят ОЛОД и оценивают величину дистанции
кратчайшего сближения, которая должна быть не меньше Dзад.;
ж) рассчитывают время расхождения tpacx. и дистанцию отхода от первоначального пути Dотх.,
используя новое значение V0:
находят упрежденную точку 2 условного момента возвращения на первоначальный путь
следования (21 мин), для чего проводят касательную к окружности Dзад. параллельную ЛОД, и
точку пересечения этой касательной с ОЛОД, которая и есть упрежденная точка 2;
рассчитывают tpacx., откладывая величину V0 по ОЛОД до упрежденной точки 2;
определяют Dотх., для чего по линии нового курса V’H откладывают расстояние, которое
пройдет наше судно за время tpacx. Из конечной точки этого плавания опускают перпендикуляр
на линию первоначального курса — он и есть Dотх.;
з) рассчитывают момент начала маневра с учетом маневренных элементов своего судна
вычитают из условного момента упрежденной точки (п. 2.4.4д) 2/з известного из Таблиц
маневренных элементов времени маневра.
Радиолокационная прокладка на зеркальном планшете аналогична прокладке на
маневренном планшете.
На поверхности зеркального планшета специальным карандашом-стеклографом отмечают
через избранный интервал времени положения эхо-сигналов целей. Дальнейшие графические
построения выполняют в полном соответствии с изложенным выше.
Принципиальные достоинства зеркального планшета: радиолокационное наблюдение,
глазомерную оценку ситуации и графическую прокладку выполняет один человек; исключается
необходимость выполнения радиолокационных измерений и переноса этих измерений на
планшет, с чем связана возможность промаха.
Принципиальными недостатками зеркального планшета являются: параллакс; некоторая
потеря качества изображения в зеркальном отражении;
отрыв нанесенной прокладки от реальных эхо-сигналов при переключении шкал дальности
РЛС.
Полная оценка ситуации.
Полная оценка ситуации — важный этап обработки радиолокационной информации,
обобщающий результаты визуального, слухового и радиолокационного наблюдения, всю
первичную и вторичную радиолокационную информацию, полученную из глазомерной оценки,
ручной или автоматизированной прокладки, конкретные навигационно-гидрографические и
гидрометеорологические условия данного момента, требования МППСС-72.
Основной задачей полной оценки ситуации является обоснование необходимости и вида
маневра для расхождения, т. е. получение ответов на вопросы: с кем расходиться? Что делать?
Когда маневрировать?,
Выбор и обоснование маневра в ситуации с несколькими целями выполняют этапами
(приближениями), которые удобно рассмотреть на конкретном примере. Вернемся к ситуации на
рис. 18 и воспроизведем ход рассуждений.
а) Сначала судоводитель, глядя на векторы целей и представляя за ними ракурсы судов,
воспроизводит в пространственном воображении существующую ситуацию и возможные
маневры своего судна для предотвращения опасного сближения судов. Очевидно, сразу же из
перечня возможных маневров исключается отворот влево, так как он связан с опасным
пересечением курсов обоих судов. В то же время отворот вправо возможен, если этому маневру
не препятствуют навигационные или иные ограничения. Проход между судами при имеющемся
пространстве рискован и будет противоречить хорошей морской практике. Если имеются помехи
изменению курса вправо, обосновывают маневр уменьшением скорости или комбинированный.
Наконец, анализируя ситуацию, делаем логический вывод, что любой из рассмотренных
видов маневра следует рассчитывать относительно судна Б, ситуация с которым более сложна.
б) Логика рассуждений проверяется графическим анализом. Из рис. 19 видно, что любой из
выбранных видов маневра обеспечивает улучшение ситуации с судном А, так как отворот ЛОД
приводит к увеличению Дкр.
В то же время ситуация относительно судна Б первоначально будет ухудшаться,
понадобятся значительные по величине маневры для улучшения ситуации, а это указывает на
то, что основное внимание при расчете маневров следует действительно уделить судну Б. Таким
образом, в первом приближении получен ответ на вопрос, с кем расходиться.
в) Выводы о судне, относительно которого следует рассчитывать маневр, и виде маневра
для расхождения должны быть логически увязаны с временными факторами опасности tкp. и tnep. с
учетом взаимного положения судов.
В нашей ситуации любой из выбранных видов маневра обеспечивает, когда бы он ни был
выполнен, улучшение ситуации с судном А.
В то же время задерживаться с маневром относительно судна Б нельзя, так как с каждой
минутой наше судно приближается к линии курса этого судна и для расхождения будет
требоваться все больший отворот или все меньшая скорость.
г) Графический анализ ситуации (рис. 20) доказывает, что для расхождения с судном А даже
за пределами заданной дистанции достаточно отвернуть вправо на 80° или уменьшить ход до
1/4 , VH на 18-й минуте.
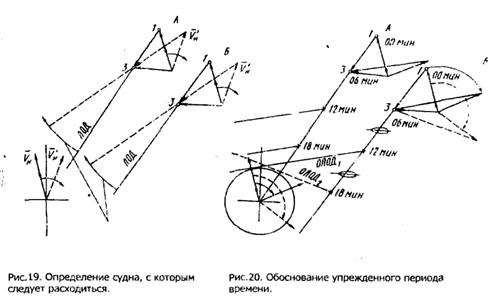
В то же время для расхождения с судном Б при его ракурсе такие же отворот или
уменьшение скорости следует выполнить до 12-й минуты, т. е. в условиях довольно жесткого
дефицита времени. Дальнейшая задержка с маневром потребует вдвое большего отворота
вправо, а расхождение уменьшением скорости вообще не обеспечивается, так как наше судно
будет на пути судна Б. Таким образом, в первом приближении получен ответ на вопрос, когда
расходиться.
д) При выборе и обосновании маневра определяется реальность назначенных величин 0ЯЛ1
dotx и других критериев. Например, определение дистанции отхода после маневра изменением
курса позволяет проверить пригодность выбранного маневра с навигационной точки зрения, так
как пространства для маневрирования может не хватить и от этого вида маневра придется
отказаться.
е) Если в результате выполненного анализа предположения, основанные на логических
рассуждениях и качественных оценках, не подтвердятся, судоводитель должен от них
отказаться и искать другое решение задачи.
Маневр
12-я минута: изменение курса вправо 35°.
17-я минута: прежний
режим движения.
.................................................
| Dзад.=
0.5, 1.0,
1.5, 2.0 миль
| |
............................................
|
tзад= 6, 12 мин.
|
|
| Кн°
| vh,УЗ
| A Dкp= 4 кбт.
tкр.= 23 мин.
| В Dкp= 3 кбт.
tкр = 25 мин.
| С DKP=0
tкр =27 мин.
| K DKP=………………………..
tкр =……………………………
|
| п,°
| D,
миль
| п,°
| D, миль
| п,°
| D, миль
| П,°
| D, миль
|
|
| 360°
| 20
| 45
| 9.1
| 60
| 7.9
| 12
| 6.0
|
|
|
|
| 360°
| 20
| 45
| 7.2
| 59
| 6.5
| 12
| 5.0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | | | | | | | | | | | |
6. Из упрежденной точки проводят штриховую линию, параллельную вектору V0 по
направлению стрелки и получают ОЛОДВ,. Прикладывают параллельную линейку к ЛОДв,
проводят касательную к окружности Dзад до пересечения с ОЛОДв и получают точку возвра-
щения к первоначальным параметрам движения собственного судна. Графически, новым
значением вектора относительного перемещения V0, от 12-ти минутной точки определяют время
возвращения (в нашем случае это 17-я минута) и записывают его значение в таблицу. Снимают
значение пеленга и расстояния до лимитирующего судна в момент возвращения к
первоначальным параметрам и записывают их в таблицу. Однако необходимо отметить, что
упрежденная точка и возвращения к первоначальным параметрам являются приближенными
(ориентировочными), с запасом в безопасную сторону, поэтому необходимо вести тщательный
контроль процесса расхождения.
7. Поворачивают вектор VH у судов А и С вправо на тот же угол 35°, проводят их ОЛОДЫ и на
них графически наносят положение на 17-ой минуте новым значением векторов относительного
перемещения от 12-ой минуты (см. рис.22). От указанных точек проводят линии параллельные
первоначальным ЛОД со стрелками, помечая дальнейшее перемещение эхо-сигналов объектов.
Основной особенностью решения задачи расхождения с несколькими судами является
необходимость выбора одного маневра для всех опасных, а также возвращение к
первоначальным параметрам по лимитирующему судну. В приведенном примере рассмотрено
одношаговое решение задачи, только маневром отворота вправо.
Для документирования процесса расхождения и подтверждения назначения допустимых
величин Dзад и tзад. их значение рекомендуется обвести кружочком в верхней части таблицы (см.
табл. 4, 5).
Рассмотрим порядок решения задачи при ситуации, когда справа на траверзе имеется
отметка объекта и отворот вправо не рекомендуется (см. рис.22).
В этом случае принимается принципиальное решение по маневрированию - сначала
уменьшают скорость не менее чем на половину (вплоть до минимального хода, достаточного для
удержания судна на курсе), а затем пропустив судно справа, отворачивают вправо с
восстановлением скорости до первоначально выбранного безопасного ее значения. Для того,
чтобы не затенять рисунок, подробное построение вспомогательных линий выполнено только
для судна В, для остальных производят аналогично. Соответствующие записи в таблице
обработки, о характере перемещения судов и маневры собственного приведены в табл. 4.
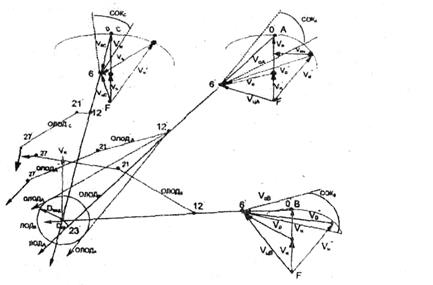
Рис.22. Решение задачи расхождения с двумя судами.
Таблица 4. Обработка радиолокационной информации.
| Суда: А - Пересекает курс по носу
справа
|
МАНЕВР
в
р
| 12-я минута: изменение курса
| Dзад.= мин.
|
| До 0.4 Vy
|
| В -Опасное судно справа
| 21-я минута: отворот вправо
| 0.5, 1.0
|
| С - Опасное судно, скорость
меньше нашей
миль
| 27-я минута: восстановлен
начальный режим
……………………………………………………
.............................
|
1.5, 2.0миль мимил
|
|
К.................................................
|
tзад= 6, 12
|
|
|
|
|
| Кн°
| vh,УЗ
| A Dкp= 4 кбт.
tкр.= 23 мин.
| В Dкp= 3 кбт.
tкр = 25 мин.
| С DKP=0
tкр =27 мин.
| K DKP=…………………
tкр =………………………
|
| п,°
| D,
миль
| п,°
| D, миль
| п,°
| D, миль
| П,°
| D, миль
|
|
| 360°
| 20
| 45
| 9.1
| 90
| 7.9
| 12
| 6.0
|
|
|
|
| 360°
| 20
| 45
| 7.2
| 90
| 6:5
| 12
| 5.0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | | | | | | | | | | | | | |
Порядок построений при этом будет до момента проведения секторов опасных курсов
аналогичен, как и при одношаговом решении задачи. Поскольку при анализе ситуации на
планшете стало очевидно (см. рис. 22), что отворачивать вправо нельзя из-за судна справа на
траверзе, то необходимо уменьшать скорость. Дальнейший ход решения задачи следующий.
1. уменьшают скорость до значения 0.4Vн и помечают вектор V’н для каждого судна и
соединяют его конец с 6-ти минутной точкой, направляя стрелку в 6-ю минуту, получают новое
значение вектора относительного перемещения V0, которое будет различным для каждого судна.
2. Определяют, что лимитирующим будет судно В. Ориентируясь по нему очевидно, что на 21-ой минуте его ЛОД будет на достаточном расстоянии по носу собственного судна. Поэтому на 21 поворачивают вправо на 35° и увеличивают скорость до первоначально выбранной безопасной, получают вектор Vн". Наносят на ОЛОДВ положение судна В на 21-ой минуте.
3. Из конца Vн" в 6-ю минуту проводят новое значение вектора V0",из 21-ой минуты проводят
линию параллельную V0" по направлению стрелки и получают ОЛОДв. Из анализа ситуации
видно, что возвращаться к первоначальным параметрам можно на 27-ой минуте, Наносят ее на
ОЛОДв, помечают цифрой 27 и проводят сплошную линию параллельную первоначальному ЛОДв
со стрелкой, указывающей направление дальнейшего перемещения эхо-сигнала объекта.
4. Аналогично выполняют построение для судов А и С и проверяют перемещение отметок с
таким расчетом, чтобы они не зашли в область недопустимых значений Dкр. Решение задачи
можно считать законченным, когда нанесено положение всех отметок на планшете на момент
возвращения к первоначальным параметрам движения собственного судна.
Эффективность маневра.
Опыт показывает, что практически в любой ситуации имеется не один, а несколько
маневров, в результате которых можно избежать столкновения. Очевидно, из всех возможных
маневров судоводитель должен выбрать такой, который позволит решить задачу расхождения с
наименьшими потерями времени и пути и при этом, безусловно, будет соответствовать
требованиям МППСС-72.
Для того чтобы маневр был эффективен, он в соответствии с МППСС-72 и хорошей морской
практикой должен быть заблаговременным, своевременным, решительным, заметным для других
судов, ведущих радиолокационное наблюдение, и целесообразным, т. е. логичным и понятным.
В общем случае заблаговременным считается маневр, выполняемый с достаточным запасом
времени для предупреждения неблагоприятных действий другого судна или для принятия
дополнительных мер с целью улучшения ситуации. При оценке ситуации только на основе
радиолокационной информации назначают момент маневра дпя расхождения значительно
раньше, чем при визуальной видимости, так как оценка ситуации на экране РЛС и обработка
радиолокационных данных требуют большего времени. Своевременность маневра была
показана ранее на примере выбора маневра.
Геометрически наиболее эффективным будет такой из возможных маневров для
расхождения, который приведет к развороту ЛОД на значительный угол а (рис. 23) или к
быстрому уменьшению относительной скорости (рис. 24); обусловив улучшение ситуации. Таким
образом, величины V0 и а можно рассматривать как показатели эффективности маневра для
расхождения.
При этом чем больше при равенстве прочих факторов наше судно уступает в скорости, тем
больший угол отворота потребуется, чтобы увеличить дистанцию расхождения. (На рис. 23 наша
скорость вдвое меньше скорости цели.)
Если же наша скорость превышает скорость другого судна, действует обратная зависимость:
даже небольшое изменение нашего курса может обеспечить значительный разворот ЛОД, чем
можно воспользоваться, например, при обгоне другого судна.
Маневр, противоречащий МППСС-72, не может счи





