РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ И ПРИНЦИПИАЛЬНОЙ СХЕМ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ ЭЛЕКТРОПОТРЕБЛЕНИЯ
Рис. 5.1. Функциональная схема управления объектом электропотребления
Разработка принципиальной схемы системы управления объектом электропотребления
В этом разделе необходимо выбрать микроконтроллер, рассчитать датчики и функции преобразования для АЦП, выбрать ЖКИ и сформировать для него информационные сообщения, обосновать выбор устройств ввода информации (кнопки управления или матричная клавиатура), а также произвести расчет элементов гальванической развязки.
Выбор микроконтроллера
Учитывая тот факт, что придется использовать микропроцессорное устройство необходимо произвести анализ современных микропроцессорных устройств (МПУ), а именно микроконтроллеров, способных реализовать поставленную задачу.
При выборе микроконтроллера системы управления объектом электропотребления необходимо определить минимальные параметры микроконтроллера.
Определим параметры микроконтроллера исходя из функциональной схемы:
- программируемая памятьFlashне менее 2 кбайт;
- высокое быстродействие;
- наличие прерываний от внешних источников;
- наличие встроенного аналого-цифрового преобразователя с тремя каналами для оцифровки;
- не менее двух портов ввода вывода;
- наличие аналогового компаратора:
- низкая стоимость.
В соответствии с вариантом задания выбрать по прил. 2 для анализа пяти микроконтроллеров. Их основные параметры занести в таблицу и сравнить между собой применительно к поставленной задаче.
В табл. 5.1 приведены основные параметры наиболее часто используемых микроконтроллеров различных производителей. Для анализа были выбраны следующие микроконтроллеры:
Как видно из табл. 5.1, встроенным АЦП обладают все указанные в ней микроконтроллеры кроме АТTi пу2313.Поэтому при использовании АТTi пу2313необходимо к нему подключить АЦП, а это в свою очередь заберет один из векторов внешнего прерывания. Кроме этого данный микроконтроллер оснащен всего лишь двумя портами, причем один из них семиразрядный.
Иная ситуация с микроконтроллеромATMega 16,здесь уже имеется встроенный 8-канальный 10-разрядный АЦП и аналоговый компаратор и зарезервированные под них вектора прерываний. Данный микроконтроллер имеет четыре порта ввода-вывода, причем один порт используется для АЦП. Оставшихся трех портов достаточно для подключения к контроллеру остальных устройств.
Табл. 5.1.
Рис. 5.2. Архитектура микроконтроллера ATMega 16
Встроенная Flash помять программ и ЭСППЗУ данных могут перепрограммироваться непосредственно в системе посредством интерфейса SPI(в последовательном низковольтном режиме) или программироваться стандартными программаторами энергонезависимой памяти (в12-вольтном параллельном режиме). Программирование микроконтроллеров ведется побайтово.
Максимальное потребление приборов вактивном режиме составляет 3,0 мА и впассивном режиме 1,2 мА (при VCC=3 В и f=8МГц). В режиме пониженного энергопотребления, при работающем сторожевом таймере, микроконтроллер потребляет 15 мкА.
Объединение на одном кристалле усовершенствованного 8-разрядного RISC ЦПУ с загружаемым Flash ПЗУ позволило создать мощный микроконтроллер, обеспечивающий высокую гибкость и экономичность в его использовании в качестве встраиваемого МК.
Рис. 5.4. Габаритные размеры корпуса TQFP микроконтроллера ATMega 103.
Следует заметить, что установочные размеры для корпуса TQFP микроконтроллера ATmega 103 и ATMega 16 совпадают, а отличаются только количеством выводов.
Выбор и расчет датчиков
Датчики напряжения, тока, скорости вращения и температуры должны выбираться исходя из рассчитанных параметров двигателя.
Расчет датчика напряжения
Зная величину действующего напряжения, например , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
1. Определим максимальное значение измеряемого напряжения при возможном перенапряжении в 30%:
где – это коэффициент перенапряжения: .
Диапазон напряжений, который необходимо контролировать, составляет от 0 В до 404,47 В.
2. Выбираем в качестве датчика напряжения трансформатор напряжения, который понижает максимальное значение на первичной обмотке до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП, например, , где – это опорное напряжение для АЦП.
3. Определим коэффициент трансформации:
4. Определим действующие значения напряжений:
– первичной обмотки
– вторичной обмотки
5. Определим максимально допустимый ток вторичной обмотки трансформатора при входном сопротивлении АЦП :
6. По значениям тока и напряжения на вторичной обмотке определим полную мощность трансформатора:
7. Выбираем понижающий трансформатор серии ОСМ1-0,4 со следующими параметрами:
Параметр
Расчетный
условие
ОСМ1-0,4
, В
286
≤
380
, В
3,54
≤
5
80,89
>
76
, мА
0,5
≤
80000
, мВт
2,5
≤
400000
при = 286
-
-
3,76
– данный параметр вычисляется с использованием коэффициента трансформации выбранного трансформатора: .
8. Вторичное действующее напряжение получается чуть больше заданного, поэтому в выходную цепь устанавливают резистивный делитель (подстроечный резистор), который согласовывает значения напряжений. При мощности резистора 0,25 Вт (иногда можно брать 0,125 Вт – производители импортных деталей) суммарное сопротивление подстроечных резисторов может составлять не более:
Этот параметр значительно меньше, чем входное сопротивление АЦП , соответственно можно выбрать от 0,0625 Ом до значения, сравнимого с , которое не должно превышать 10% от номинального значения:
9. На основании изложенного получаем схему подключения измерительного трансформатора напряжения к однофазной цепи, представленной на рис. 5.5. С вторичной обмотки трансформатора Тр2 напряжение подается на выпрямительный диод VD 2(1N4007). Пульсирующее напряжение с катода VD 2 сглаживается подсоединенным конденсатором C2 (10 μF).
Рис. 5.5. Схема подключения датчиков тока и напряжения к цепи однофазного асинхронного двигателя
Расчет датчика тока
Зная величину действующего тока, например , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
1. Определим максимальное значение измеряемого тока при возможном перенапряжении в 30%:
где – это коэффициент перегрузки по току: .
Диапазон токов, который необходимо контролировать, составляет от 0 В до 101,12 А.
2. Выбираем в качестве датчика тока трансформатор тока, который повышает максимальное значение падения напряжения на первичной обмотке , соответствующее току до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП.
Поскольку практически все измерительные трансформаторы тока выпускаются со стандартным действующим значением тока на вторичной обмотке , то к вторичной обмотке подсоединяют активное сопротивление таким номиналом, чтобы получить на нем падение напряжения, например, равное , где – это опорное напряжение для АЦП. Величина этого сопротивления:
;
где – амплитудное значение вторичной обмотки:
.
3. Определим требуемый коэффициент трансформации:
.
4. Определим действующее значение тока первичной обмотки:
.
5. По значениям тока и напряжения на вторичной обмотке определим значение полной мощности трансформатора тока с коэффициентом мощности:
.
6. Определим допустимую вторичную нагрузку трансформатора при мощности, т.е. полное сопротивление его внешней вторичной цепи:
.
7. Выбираем измерительный трансформатор тока серии ТТИ-А 75/5А со следующими параметрами:
Параметр
Расчетный
условие
ТТИ-А 75/5А
, А
71,5
≤
75
, А
5
≤
5
14,3
≤
15
, В
404,47
≤
660
, мВт
5
≤
5
, ВА
25
≥
5
, Ом
1
≤
1
8. Как видно из таблицы параметров трансформатора тока ТТИ-А 75/5А, значение полной мощности трансформатора тока оказалось меньше требуемого значения. Это приведет к тому, что для протекания тока 5 А следует уменьшить значение:
.
Тогда вторичное напряжение на нагрузке составит:
.
Поскольку этого значения напряжения недостаточно для точной оцифровки АЦП, то целесообразно уменьшить ток, увеличив сопротивление так, чтобы . При этом вторичный ток определиться как:
;
а значение:
9. На основании изложенного получаем схему подключения измерительного трансформатора напряжения к однофазной цепи, представленной на рис. 5.5. С вторичной обмотки трансформатора Тр1 напряжение подается на параллельно подсоединенное сопротивление R 1(5 Ом) и выпрямительный диод VD 1(1N4007). Пульсирующее напряжение с катода VD 1 сглаживается подсоединенным конденсатором C1 (10 μF).
Выбор датчика температуры
Полупроводниковые датчики температуры предназначены для измерения температуры от -55° до 150°С. В этот диапазон попадает огромное количество задач, как в бытовых, так и в промышленных приложениях. Благодаря высоким характеристикам, простоте применения и низкой стоимости полупроводниковые датчики температуры оказываются очень привлекательными для применения в микропроцессорных устройствах измерения и автоматики.
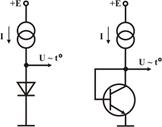
Принцип работы
Физический принцип работы полупроводникового термометра основан на зависимости от температуры падения напряжения на p-n-переходе, смещенном в прямом направлении. Данная зависимость близка к линейной, что позволяет создавать датчики, не требующие сложных схем коррекции. В качестве чувствительных элементов на практике используются диоды, либо транзисторы, включенные по схеме диода. Для проведения измерений, необходимо протекание стабильного тока через чувствительный элемент. Выходным сигналом является падение напряжения на датчике.
Рис. 5.6. Полупроводниковые датчики температуры
Схемы, использующие одиночный p-n-переход, отличаются низкой точностью и большим разбросом параметров, связанных с особенностями изготовления и работы полупроводниковых приборов. Поэтому промышленность выпускает множество типов специализированных датчиков, имеющих в своей основе вышеописанныйпринцип, нодополнительно оснащенных цепями, устраняющими негативные особенности и значительно расширяющими функционал приборов.
Табл. 5.2.
Примеры аналоговых датчиков температуры
Модель
Диапазон измерений
Точность
Температурный коэффициент
Производитель
LM35
от -55°С до +150°С
±2 °С
10 мВ/°С
National Semiconductor
LM135
от -50°С до +150°С
±1,5 °С
10 мВ/°С
National Semiconductor
LM335
от -40°С до +100°С
±2 °С
10 мВ/°С
National Semiconductor
TC1047
от -40°С до +125°С
±2 °С
10 мВ/°С
Microchip
TMP37
от -40°С до +125°С
±2 °С
20 мВ/°С
Analog Devices
Кроме простых датчиков, производители предлагают также готовые интегральные системы термостатирования. Подобные микросхемы, например LM56 от National Semiconductor, оснащены выходом для управления нагрузкой. Температура срабатывания выхода задается в виде заводской установки, либо с помощью навесных элементов, подключаемых к специальным входам задания. Невысокое качество регулирования, обеспечиваемое данными элементами, компенсируется их простотой использования и сверхнизкой стоимостью готовых систем управления.
Рис. 5.7. Реализация схемы включения LM335 в программном симуляторе Prot eus
Рис. 5.9. Внешний вид тахогенератора постоянного тока
5.2.2.4.2.Тахогенераторы переменного тока
Синхронные тахогенераторы – однофазная синхронная машина с ротором в виде постоянного магнита (рис. 5.10, а), У синхронных тахогенераторов с изменением угловой скорости вместе с амплитудой изменяется и частота выходного напряжения. Статические характеристики нелинейны. В динамическом отношении синхронные тахогенераторы являются неинерционными элементами.
Асинхронный тахогенератор – это двухфазная асинхронная машина с полым немагнитным ротором (рис. 5.10, б). На статоре асинхронного тахогенератора размещаются две сдвинутые на 90 обмотки (возбуждения ОВ и генератора ОГ). Обмотка ОВ подключается к источнику переменного тока.
Рис. 5.10. Тахометрические генераторы переменного тока: а – синхронный, б – асинхронный
В обмотке OГ, являющейся выходной, при вращении ротора наводятся э.д.с. трансформации и вращения. Под действием э.д.с. вращения на выходе тахогенератора возникает напряжение .
Статическая характеристика асинхронного тахогенератора также нелинейна. При изменении вращения ротора фаза выходного напряжения изменяется на 180°.
Рис. 5.11. Внешний вид тахогенератора переменного тока
Асинхронные тахогенераторы используют как датчики угловой скорости, частоты вращения и ускорений. В последнем случае обмотка возбуждения асинхронного тахогенератора подключается к источнику постоянного тока.
Достоинства асинхронных тахогенераторов – надежность, малая инерционность. Недостатки – наличие на выходе остаточной э.д.с. при неподвижном роторе, относительно большие габариты.
5.2.2.4.3.Тахометрические мосты
Тахометрические мосты постоянного и переменного тока применяют в системах автоматики для создания обратной связи по частоте вращения электрических двигателей. Это позволяет упростить систему, так как отпадает необходимость в дополнительной электрической машине - тахогенераторе. При этом уменьшаются статические и динамические нагрузки на исполнительный двигатель.
Тахометрический мост постоянного тока представляет собой специальную мостовую схему (рис. 5,12, а), в одно из плеч которой включен якорь двигателя , а в другие – резисторы , , . К диагонали моста а b подводится напряжение сети , питающее якорь двигателя, а с диагонали cd снимается напряжение пропорциональное угловой скорости ω.
Рис. 5.12. Тахометрический мост постоянного тока (а) и бесконтактное измерительное устройство частоты вращения асинхронного двигателя (б)
Если ток в выходной цепи отсутствует, то
Решая совместную систему уравнений, получим
Напряжение на выходе тахометрического моста
где – коэффициент передачи тахометрического моста.
Погрешность тахометрического моста составляет ±(2-5)%. В динамическом отношении тахометрические мосты постоянного тока являются неинерционным звеном.
Для контроля частоты вращения ротора асинхронного электродвигателя применяют бесконтактное измерительное устройство (рис. 5.12, б), содержащее измерительный трансформатор тока ТА и напряжения TV.
Выбор тахогенератора
Тахогенератор выбирается из следующих условий:
а) превышения частоты вращения тахогенератора
;
б) превышения максимального напряжения оцифровки
в) превышения максимального тока над расчетным значением
1. Определим номинальную крутизну изменения выходного напряжения:
Поскольку меньше чем у любого из представленных в табл. 5.3 тахогенераторов, то необходимо использовать резистивный делитель (рис. 5.13).
Предварительно выбираем (по прил. 2) тахогенератор с наименьшим :
1,6ТГП2; .
2. Определим величину выходного напряжения тахогенератора на максимальной скорости:
Рис. 5.13. Схема подключения резистивного делителя к тахогенератору постоянного тока.
3. При активном сопротивлении нагрузки тахогенератора определим ток при максимальной скорости вращения:
4. К цепи якоря тахогенератора подключаем резистивный делитель, состоящий из двух сопротивлений и , которые соединены последовательно, причем . Точка соединения обмотки якоря тахогенератора и подключается к общему выводу аналоговой части измерительной схемы (AGND). Точка соединения и к входу канала встроенного АЦП в AVR -микроконтроллер. Таким образом, падение напряжения на должно составить 5 В. Определим :
Принимаем значение из ряда номинальных значений для резисторов.
Определим сопротивление :
Принимаем значение из ряда номинальных значений для резисторов.
5. Уточненное значение тока тахогенератора при максимальной скорости вращения:
– условие (в) выполняется.
6. Уточненное значение падения напряжения на при максимальной скорости вращения тахогенератора:
– условие (б) не выполняется!
7. Поскольку последнее условие не выполняется, то сделаем сопротивление составным – из двух последовательно соединенных сопротивлений и , причем . Сначала определим максимальный ток при:
Теперь определим значение :
В итоге получаем :
Принимаем значение из ряда номинальных значений для резисторов.
8. Новое уточненное значение тока тахогенератора при максимальной скорости вращения:
– условие (в) выполняется.
9. Новое уточненное значение падения напряжения на при максимальной скорости вращения тахогенератора:
– условие (б) выполняется.
Рис. 5.14. Внешний вид BC 1602 F и LM 016 L
Рис. 5.15. Габаритные размеры BC 1602 F
Назначение выводов LCD BC1602F представлено в табл. 5.3., а схема подключения к А VR -микроконтроллеру представлена на рис. 5.16.
Табл. 5. 3.
Назначение выводов
№ вывода
Название
Функция
1
Vss
Общий (GND)
2
Vdd
Напряжение питания
3
Vo
Контрастность
4
RS
Команды/Данные
5
R/W
Чтение/запись
6
E
Выбор модуля
7
DB0
Линия данных 0
8
DB1
Линия данных 1
9
DB2
Линия данных 2
10
DB3
Линия данных 3
11
DB4
Линия данных 4
12
DB5
Линия данных 5
13
DB6
Линия данных 6
14
DB7
Линия данных 7
Рис. 5.16. Схема подключения ЖКИ LM 016 L к порту D А VR -микроконтроллера
Огромный сегмент ЖКИ выпускается различными производителями для постсоветского пространства, в которых предусмотрено наличие символов кириллицы (см. табл. 5.4).
Табл. 5. 4.
Таблица русских символов
Символ
Код
Символ
Код
Б
A0
Ф
AA
Г
A1
Ч
AB
Д
E0
Ц
E1
Ё
A2
Ш
AC
Ж
A3
Щ
E2
З
A4
Ъ
AD
И
A5
Ы
AE
Й
A6
Э
AF
Л
A7
Ю
B0
П
A8
Я
B1
У
A9
б
B2
т
BF
в
B3
у
(y)
г
B4
ф
E4
д
E3
ч
C0
ё
B5
ц
E5
ж
B6
ш
C1
з
B7
щ
E6
и
B8
ъ
C2
й
B9
ы
C3
к
BA
ь
C4
л
BB
э
C5
м
BC
ю
C6
н
BD
я
C7
п
BE
Устройство ввода данных
Пользователю микропроцессорной системы управления всегда должна предоставляется возможность настройки системы и коррекция её параметров. Посредством воздействия на кнопки управления пользователь может корректировать (подстраивать) работу системы, как в активном её состоянии, так и в режиме настройки.
Существует два основных способа подключения кнопок управления к микроконтроллеру:
- непосредственное подключение;
- матричная клавиатура.
Выбор способа осуществляется разработчиком системы исходя из поставленной задачи.
Например, при фазовом регулировании оператор отслеживает визуально параметры на ЖКИ и в процессе работы осуществляет коррекцию параметров системы путем нажатия соответствующих кнопок управления. Поэтому выбирается в данном случае способ непосредственного подключения кнопок управления к порту микроконтроллера, как показано на рис. 5.17.
Рис. 5.17. Схема непосредственного подключения кнопок управления к порту D А VR -микроконтроллера
Поскольку изменение параметров системы происходит в процессе работы, то целесообразно использовать внешние прерывания INT0 и INT1. Это позволит избежать в программе наличия опроса состояния кнопок управления.
Рассмотрим второй способ.
Если система работает полностью автономно, оператор только настраивает параметры системы и осуществляет её включение и выключение, то рекомендуется использовать матричную клавиатуру. Основным достоинством матричной клавиатуры является то, что к n-выводам порта можно подключить матричную клавиатуру, состоящую из кнопок. Например, к 8-разрядному порту можно подключить клавиатуру из 16 кнопок, а к 2-м 8-разрядным портам – клавиатуру из 64 кнопок.
В этом случае программа как бы состоит из двух частей: блок настройки параметров системы и блок рабочего режима. Количество используемых клавиш и их назначение в каждом блоке может отличаться друг от друга. Поэтому на условном графическом обозначении матричной клавиатуры покажем оба функциональных назначения. Схема подключения матричной клавиатуры представлена на рис. 5.18.
Рис. 5.18. Схема подключения матричной клавиатуры к порту B А VR -микроконтроллера
На рис.5.18 показана матричная клавиатура, посредством которой возможен перевод микропроцессорной системы в три режима работы из режима ожидания: рабочий режим – ACTIVE; режим настройки параметров – PARAM и режим тестирования – TEST (тестируются датчики). Используемые клавиши выделены красным цветом.
При выборе рабочего режима активной будет только одна двуфункциональная клавиша Start / Stop, которая запускает и останавливает работу системы. Используемая клавиша выделена зеленым цветом.
При выборе режима настройки параметров активными будут все клавиши, причем клавиша Start / Stop будет выполнять функцию удаления последнего символа, если он неправильно набран (С)lear. Однако эта альтернатива на схеме не показана из-за недостатка места. Используемые клавиши выделены синим цветом.
При выборе режима тестирования тестируется работа датчиков, производится их коррекция и т.д. – активных клавиш нет.
Для возврата в режим ожидания необходимо завершить все процедуры: остановить работу системы клавишей Stop, закончить ввод всех параметров и т.д. Нажатие клавиши выбора другого режима осуществит возврат в режим ожидания.
В случае необходимости расширения функциональных возможностей клавиатуры рекомендуется наделить одну из клавиш функцией Shift.
Табл. 5.5.
Алгоритм основной программы
Алгоритм работы основной программы микропроцессорной системы управления представлен на рис. 6.1.
Рис. 6.1. Алгоритм работы основной программы микропроцессорной системы управления
Основная программа состоит из следующих частей:
- инициализация системы (неповторяющаяся часть программы);
- режим циклического опроса кнопок управления (или матричной клавиатуры);
- режим тестирования;
- рабочий режим;
- режим коррекции параметров (только при матричной клавиатуре).
Опрос кнопок проводится до тех пор, пока не будет нажата одна из возможных кнопок. Затем осуществляется переход на соответствующую подпрограмму. Выход из подпрограммы произойдет при нажатии соответствующих кнопок.
Рис. 6.3. Алгоритм подпрограммы режима тестирования
Рис. 6.4. Алгоритм подпрограммы режима коррекции параметров
Алгоритмы подпрограмм ввода уставок тока, скорости вращения и температуры выполнить самостоятельно.
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...






 , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
, необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП. при возможном перенапряжении в 30%:
при возможном перенапряжении в 30%:
 – это коэффициент перенапряжения:
– это коэффициент перенапряжения:  .
. до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП, например,
до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП, например,  , где
, где  – это опорное напряжение для АЦП.
– это опорное напряжение для АЦП.
 :
:

 , В
, В
 , В
, В

 , мА
, мА
 , мВт
, мВт
 при
при  .
.
 , соответственно можно выбрать
, соответственно можно выбрать  от 0,0625 Ом до значения, сравнимого с
от 0,0625 Ом до значения, сравнимого с 
 , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
, необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП. при возможном перенапряжении в 30%:
при возможном перенапряжении в 30%:
 – это коэффициент перегрузки по току:
– это коэффициент перегрузки по току:  .
. до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП.
до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП. , то к вторичной обмотке подсоединяют активное сопротивление таким номиналом, чтобы получить на нем падение напряжения, например, равное
, то к вторичной обмотке подсоединяют активное сопротивление таким номиналом, чтобы получить на нем падение напряжения, например, равное  ;
; .
. .
. .
. :
: .
. , т.е. полное сопротивление его внешней вторичной цепи:
, т.е. полное сопротивление его внешней вторичной цепи: .
. , А
, А
 , А
, А
 , В
, В
 , мВт
, мВт
 , Ом
, Ом
 .
. .
. . При этом вторичный ток определиться как:
. При этом вторичный ток определиться как: ;
;


 .
.
 , а в другие – резисторы
, а в другие – резисторы  ,
,  ,
,  . К диагонали моста а b подводится напряжение сети
. К диагонали моста а b подводится напряжение сети  , питающее якорь двигателя, а с диагонали cd снимается напряжение
, питающее якорь двигателя, а с диагонали cd снимается напряжение 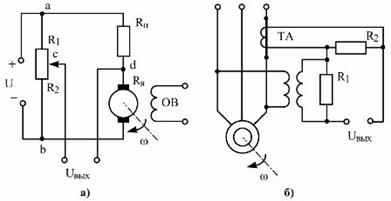



 – коэффициент передачи тахометрического моста.
– коэффициент передачи тахометрического моста. ;
;


 меньше чем у любого из представленных в табл. 5.3 тахогенераторов, то необходимо использовать резистивный делитель (рис. 5.13).
меньше чем у любого из представленных в табл. 5.3 тахогенераторов, то необходимо использовать резистивный делитель (рис. 5.13). :
: ;
;  .
.
 определим ток при максимальной скорости вращения:
определим ток при максимальной скорости вращения:
 . Точка соединения обмотки якоря тахогенератора и
. Точка соединения обмотки якоря тахогенератора и 
 из ряда номинальных значений для резисторов.
из ряда номинальных значений для резисторов.
 из ряда номинальных значений для резисторов.
из ряда номинальных значений для резисторов.

 составным – из двух последовательно соединенных сопротивлений
составным – из двух последовательно соединенных сопротивлений  и
и  , причем
, причем  . Сначала определим максимальный ток
. Сначала определим максимальный ток  при
при  :
:


 из ряда номинальных значений для резисторов.
из ряда номинальных значений для резисторов.


 кнопок. Например, к 8-разрядному порту можно подключить клавиатуру из 16 кнопок, а к 2-м 8-разрядным портам – клавиатуру из 64 кнопок.
кнопок. Например, к 8-разрядному порту можно подключить клавиатуру из 16 кнопок, а к 2-м 8-разрядным портам – клавиатуру из 64 кнопок.