

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
СТРУКТУРА КУРСОВОГО ПРОЕКТА
Курсовой проект по дисциплине «Микропроцессорные системы управления в электроэнергетике» выполняется по индивидуальным вариантам (см. прил. 1), которые выдаются студентам не позднее, чем за 1,5 месяца до их защиты. Курсовой проект состоит из 2-х чертежей, выполненных на листах формата А1, и пояснительной записки объемом 40-50 листов. В пояснительной записке тип и размер шрифта должен быть Times New Roman, 14 пт, интервал – 1,5 пт, заголовки – полужирными, заглавными буквами с отступом от основного текста 6 пт. Формулы и выполненные по ним расчеты должны быть набраны в редакторе формул с параметрами по умолчанию.
На первом листе располагается чертеж (А1) электрической принципиальной схемы управления объектом электропотребления. На втором листе располагаются два чертежа (2 х А2), на которых отображаются функциональная схема микропроцессорной системы и алгоритм для программы выбранного микроконтроллера. Чертежи должны быть выполнены в соответствии с единой системой конструкторской документации (ГОСТ 2.702-2011, ГОСТ 2.701-2008).
Пояснительная записка выполняется на листах формата А4 со штампом (15 мм) и состоит из реферата, содержания, введения, 4-х разделов, объемом до 12 стр. каждый, а также заключения, списка литературы и приложений. Первый лист каждого раздела (в т.ч. введение, заключение и реферат) должен быть со штампом 40 мм.
В реферате (1 стр.) указывается количество страниц, рисунков, таблиц и источников литературы пояснительной записки, а также ключевые слова (8-12 ключевых слов), (штамп – 40 мм).
В содержании (до 2-х стр.) необходимо указать названия разделов и подразделов и номера страниц, с которых они начинаются (штамп – 40 мм). Список содержания начинается с введения (без реферата) и заканчивается приложениями, а в случае их отсутствия – списком литературы.
|
|
Во введении (2-3 стр.) необходимо объяснить, почему необходимо использовать микропроцессорные системы управления в электроэнергетике, показать их позитивные качества и кратко описать существующие проблемы таких систем.
Первый раздел – описание выбранного метода управления. (Например, «Широтно-импульсная модуляция в управлении скоростью ДПТ»). Часть методов управления описана в данных методических указаниях, но эти описания лишь направляют работу студента в нужное «русло». На студента возлагается задача по расширению этих базовых методов, т.е. он должен дать ответ, каким образом будет осуществлено управление объектом с помощью микропроцессорной системы.
Второй раздел – расчет силовой части системы управления объектом электропотребления. (Например, «Расчет управляемого мостового выпрямителя»). Для различных типов двигателей в соответствии с вариантом задания студент должен рассчитать силовой выпрямитель или инвертор или фазовый преобразователь по изложенной в данных методических указания методике.
Третий раздел – разработка функциональной и принципиальной схем системы управления объектом электропотребления. (Например, «Разработка функциональной и принципиальной схем микропроцессорной системы управления ДПТ»). В этом разделе необходимо составить и описать функциональную схему микропроцессорной системы управления. Затем по этой схеме выбрать микропроцессорное устройство (микроконтроллер), а также сопутствующие электронные устройства (устройства гальванической развязки, индикации, кнопки управления, датчики для цепей обратных связей и т.д.). После чего приступить к составлению электрической принципиальной схемы. Следует отметить, что выбор устройств системы и составление электрической принципиальной схемы неразрывно связаны друг с другом.
|
|
Четвертый раздел – «Разработка алгоритма работы и составление программного кода для микропроцессорной системы управления». Как известно алгоритм работы удобнее всего отображать в виде блок-схемы. Поэтому сначала разрабатывается блок-схема и подробно описывается назначение каждого блока и взаимодействие между блоками. На высокоуровневом языке программирования (Pascal-SCM, C) создается программный код по составленному алгоритму. Рекомендуется воспользоваться результатами лабораторных работ. Если существует необходимость, то привести расчеты выдержек времени, накладываемых масок и пр.
В заключении (1 стр.) необходимо сделать выводы к выполненному проекту, где указать полученный диапазон регулирования микропроцессорной системой, её быстродействие, достоинства и недостатки, объем задействованной программной памяти микроконтроллера и т.д.
В списке использованной литературы (1 стр.) необходимо перечислить используемые источники литературы в порядке их обращения к ним в пояснительной записке.
В приложениях располагаются вспомогательные материалы, наличие которых в других разделах не является необходимым, например, это могут быть различные справочные материалы.
МЕТОДЫ УПРАВЛЕНИЯ ЭЛЕКТРОТЕХНИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЬНЫМИ УСТРОЙСТВАМИ
Рис. 2.1. Схема прерывателя и осциллограмма его работы
На интервале  тиристор закрыт, и выводы нагрузки закорачиваются через диод
тиристор закрыт, и выводы нагрузки закорачиваются через диод  , соответственно ток нагрузки начинает протекать через него, таким образом, обеспечивается контур протекания тока при закрытии тиристора и ток не снизится сразу до нуля. В результате этого на нагрузке создаться импульсное напряжение u, среднее значение которого можно определить по формуле:
, соответственно ток нагрузки начинает протекать через него, таким образом, обеспечивается контур протекания тока при закрытии тиристора и ток не снизится сразу до нуля. В результате этого на нагрузке создаться импульсное напряжение u, среднее значение которого можно определить по формуле:
 ; (2.1)
; (2.1)
где  – время прохождения импульса через прерыватель;
– время прохождения импульса через прерыватель;
– время нахождения прерывателя в закрытом состоянии;
 – период импульсов;
– период импульсов;
 – коэффициент заполнения, величина обратная скважности импульсов
– коэффициент заполнения, величина обратная скважности импульсов  .
.
Регулирование напряжения на нагрузке происходит путем изменения скважности импульсов. Для получения таких изменений применяют несколько способов:
- в преобразователе с неизменной частотой импульсов  регулируют лишь соотношение времени включения и выключения прерывателя. Такой метод получил название широтно-импульсной модуляции (ШИМ), (см. рис.2.2., а);
регулируют лишь соотношение времени включения и выключения прерывателя. Такой метод получил название широтно-импульсной модуляции (ШИМ), (см. рис.2.2., а);
|
|
- в случае, когда частота (период следования импульсов) переменна, регулируют время закрытого состояния прерывателя, а время открытого состояния остаётся постоянными. Данный метод имеет название частотной модуляции (ЧМ), (см. рис.2.2., б);
- в случае, когда частота так же переменна, но регулируют время открытого состояния прерывателя, а время закрытого состояния остаётся постоянными. Данный метод имеет название фазоимпульсной модуляции (ФИМ), (см. рис.2.2., в).

Рис. 2.2. Осциллограммы: а)ШИМ; б)ЧМ; в)ФИМ
Частотная и фазоимпульсная модуляции имеют некоторые недостатки.
Чтобы обеспечить регулирование во всем диапазоне частота импульсов должна меняться в довольно широких пределах, что значительно усложняет проектирование фильтров. А при некоторых частотах преобразователи могут оказывать влияние на работу линий связи (телефонных и других).
Также во время длительных пауз (тиристор в закрытом состоянии) возможно возникновение режима прерывистого тока якоря машины в зоне низких выходных напряжений;
Указанные выше обстоятельства определяют преимущества в использовании электроприводов с ШИМ.
Рассмотрим пример, в котором необходимо определить диапазон регулирования скважности при управлении.
Исходные данные:
Тип двигателя: ДПТ НВ;  ;
;  ;
;  ; машинная постоянная ДПТ
; машинная постоянная ДПТ  .
.  – действует постоянный момент, соответствующий протеканию тока в 50 А.
– действует постоянный момент, соответствующий протеканию тока в 50 А.
Решение:
Падение напряжения при минимальной скорости вращения  , при которой
, при которой  , определиться как:
, определиться как:

Исходя из этого, мы можем определить коэффициент заполнения:

Максимальному значению скорости электродвигателя будет соответствовать значение  , при которой
, при которой  .
.
Отсюда можно определить ЭДС для максимальной скорости ДПТ:

Максимальная скорость ДПТ определиться как:

Для данной системы электропривода диапазон регулирования по скорости составит 0<ω<374,5 рад/с, по скважности 0,064< δ<1.
Особое место занимают методы фазового управления и частотного управления скоростью асинхронного двигателя (АД).
Рис. 2.4. Осциллограммы симметричного способа управления
Простейшим из них является несимметричный. Несимметричное управление представлено на рис. 2.5. В этом случае (рис. 2.5, а) переключаются силовые ключи ТК3 и ТК4 (ключи ТК1 и ТК2 при противоположной полярности входного сигнала), силовой ключ ТК1 постоянно открыт, а ключ ТК2 постоянно закрыт. Силовые ключи ТК3 и ТК4 переключаются в противофазе. При включенных ТК1 и ТК4 формируется напряжение, поступающее на якорь двигателя. Одновременное включение ТК1 и ТК3 необходимо при рекуперации энергии в сеть. Это происходит при включенных ТК1 и ТК4, когда  . Ток проходит по обратным диодам этих ключей. Когда же выключается ТК4 и включается ТК3, ток не прерывается, он течет по пути: левая щетка двигателя М обратный диод ключа ТК1 ключ ТК3 правая щетка двигателя якорь двигателя.
. Ток проходит по обратным диодам этих ключей. Когда же выключается ТК4 и включается ТК3, ток не прерывается, он течет по пути: левая щетка двигателя М обратный диод ключа ТК1 ключ ТК3 правая щетка двигателя якорь двигателя.
|
|
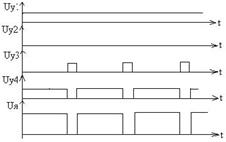
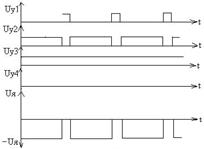
Рис. 2. 5. Осциллограммы не симметричного способа управления
При работе в двигательном режиме на выходе ИП формируются знакопостоянные импульсы и среднее напряжение на выходе равно нулю, когда относительная продолжительность включения ключа ТК4  .
.
Недостатком рассмотренного способа управления является то, что загрузка ключей рабочим током неодинакова.
Этот недостаток устранен при поочередном управлении, временные диаграммы которого изображены на рис. 2.6, а и 2.6, б.
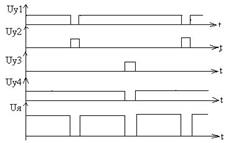
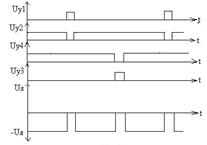
Рис. 2. 6. Осциллограммы не симметричного по очередного способа управления
Здесь при любом знаке входного сигнала в состоянии переключения находятся все четыре силовых ключа моста, однако, частота переключения каждого из них в два раза меньше частоты напряжения на выходе.
Чем ниже частота переключения силовых ключей, тем ниже дополнительные потери мощности в них, т.е. пониженная частота переключения силовых элементов является достоинством ИП.
Управляющее напряжение силовых ключей ТК1, ТК2 и ТК3, ТК4 постоянно находится в противофазе; при этом ключи переключаются через период выходного напряжения T.
Этим достигаются одинаковые условия работы полупроводниковых приборов в мостовой схеме.
При некотором знаке входного сигнала управляющие импульсы Uу1 и Uу4 длительностью t1=(1+g) t подаются на диагонально расположенные ключи со сдвигом на полпериода (рис. 2.6, а), а управляющие импульсы Uу2 и Uу3 длительностью t2=(1 - g) t также со сдвигом на полпериода подаются на силовые элементы противоположной диагонали (ТК2, ТК3). В этом случае на интервале gt нагрузка подключена к источнику питания с помощью диагонально расположенных ключей, а на интервале (1 - g) t нагрузка закорочена с помощью верхних или нижних ключей, если работа преобразователя происходит в инверторном режиме.
При изменении знака входного сигнала порядок управления диагональными ключами изменяется на противоположный (рис. 2.6, б). При поочередном управлении на нагрузке формируются знакопостоянные импульсы длительностью gt.
|
|
Рис. 2. 7. Функциональная схема системы управления импульсными преобразователями постоянного тока
Она содержит преобразователь кода во временной интервал ПКВИ, схему синхронизации СС, распределитель импульсов РИ и импульсный преобразователь, содержащий силовые ключи. На этом рисунке Uсс – опорный сигнал, подаваемый на ПКВИ от СС, Q –импульсный сигнал, снимаемый с ПКВИ ; Uу1, Uу4 – сигналы, подаваемые на силовые ключи импульсного преобразователя.
Рассмотрим варианты построения основного блока системы ПКВИ.
Для его реализации обычно используются два основных подхода. При первом подходе основным звеном преобразователя кода во временной интервал является компаратор, на вход которого подаются два сигнала: входной управляющий сигнал “ m ” и некоторый опорный сигнал Q0, обычно пилообразной формы (рис. 2.7).
На рис. 2.8, б приведена временная диаграмма работы схемы, которая может быть использована для управления силовыми ключами при симметричном способе. Схема вырабатывает управляющий сигнал в моменты равенства мгновенных значений сигналов “ Q0 ” и “ m ”. Включение импульсов происходит в начале периодов пилообразного опорного сигнала.
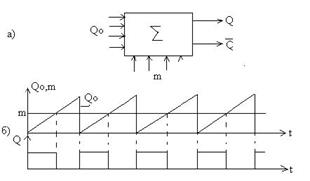
Рис. 2. 8. Основной блок системы ПКВИ, на основе компаратора
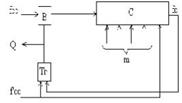
При втором подходе к реализации схемы ПКВИ используются счетчики импульсов. На рис. 2.9 приведена функциональная схема преобразователя код “ m ” во временной интервал, которая работает следующим образом. В определенные моменты времени схема синхронизации вырабатывает тактовый импульс “ fсс ”, который производит запись кода “ m ” в счетчик “ С ” и одновременно устанавливает триггер “ Т2 ” в такое состояние, при котором проводит вентиль “ В ”.
Импульсы от схемы синхронизации с частотой fсс проходят через вентиль и поступают на вход счетчика “ С ”. Счетчик работает на вычитание, причем, в тот момент, когда на счетчик будет записан нуль, на выходе счетчика будет сформирован импульс fс, который изменяет состояние триггера. Вентиль закрывается, и поступление импульсов частотой fсс на вход счетчика прекращается. Выходной сигнал Q, длительность которого пропорциональна коду m, снимается с триггера Тг. Временная диаграмма работы схемы приведена на рис. 2.9.
| 
|
Рис. 2. 9. Основной блок системы ПКВИ, на основе вычитающего счетчика
Рис. 2. 10. Однофазный мостовой выпрямитель с СИФУ
Характер нагрузки существенно влияет на работу тиристорного преобразователя.
Принимаем, что коммутация тиристоров идеальная (открываются и закрываются мгновенно), нагрузка активная.
Управляющие импульсы подаются на соответствующие тиристоры, у которых напряжение на аноде положительно, с запаздыванием на угол управления α (рис. 2.11).
В момент времени t1 открываются VS1, VS4 и проводят ток через нагрузку от A к B. В момент времени t2 эти тиристоры закрываются, так как напряжение на их анодах равно нулю.
В момент времени t3 открываются VS2, VS3 и проводят ток через нагрузку от B к A, а в момент t4 они закрываются
Главной особенностью является то, что кривые выпрямленного напряжения и тока по форме повторяют напряжение сети во время проводимости тиристоров за вычетом падения напряжения на тиристорах.
Тиристоры, в момент перехода напряжения через нуль, закрываются. Напряжение на нагрузке, когда тиристоры не проводят равно нулю.
При активной нагрузке в кривой выпрямленного тока возникают паузы при α≠0, то есть преобразователь работает в режиме прерывистых токов.
Отсчет угла α производится от точки естественного отпирания вентилей (диодов). Очевидно, что с увеличением α выпрямленное среднее напряжение будет уменьшаться.
Получим среднее напряжение за один полупериод
 (2.2)
(2.2)
где  – действующее напряжение вторичной обмотки трансформатора.
– действующее напряжение вторичной обмотки трансформатора.
Напряжение тиристорного преобразователя при α=0
 (2.3)
(2.3)
где  – коэффициент схемы выпрямления.
– коэффициент схемы выпрямления.
Это отношение среднего выпрямленного напряжения  при
при
α=0, к фазному напряжению подаваемому на ТП.
Рис. 2. 11. Осциллограммы работы однофазного мостового выпрямителя
с системой импульсно–фазового управления
В результате получим
 (2.4)
(2.4)
Таким образом, изменяя угол α, то есть момент подачи управляющего импульса, можно изменять приложенное к нагрузке напряжение. В этом и заключается фазовое управление.
Рис. 2.16. Функциональная схема ТП для ДПТ
Функции регулирования в контуре возбуждения. Регулятор ТП сравнивает текущие значения U и ЭДС двигателя и вырабатывает задание для регулирования тока возбуждения.
В схеме ТП приведенной на рис. 2.16 управление напряжением на двигателе осуществляет микроконтроллер МК в соответствии с заданием, программой и сигналами ОС по току, скорости и ЭДС двигателя. Микроконтроллер управляет тиристорным выпрямителем UZ, выполненным по схеме Ларионова; пульсации напряжения фильтруются LC фильтром.
РАСЧЕТ И ВЫБОР ПОЛУПРОВОДНИКОВЫХ ВЕНТИЛЕЙ СИЛОВЫХ ПРЕОБРАЗОВАТЕЛЬНЫХ УСТРОЙСТВ
РАСЧЕТ ВЫПРЯМИТЕЛЕЙ
Рис. 1.1. Принципиальная схема трехфазного мостового выпрямителя
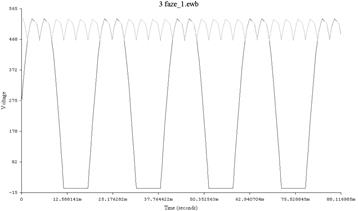
Рис. 1.2. Осциллограммы выпрямленного напряжения и напряжения фазы А трехфазного мостового выпрямителя
3.1.1.2. Схема трехфазного выпрямителя с выводом нулевой точки трансформатора
Средневыпрямленное значение напряжения (постоянная составляющая):
 (3.6)
(3.6)
где  – действующее значение ЭДС одной фазы вторичной обмотки трансформатора.
– действующее значение ЭДС одной фазы вторичной обмотки трансформатора.
 – номинальное напряжение ДПТ.
– номинальное напряжение ДПТ.
Максимальное обратное напряжение на вентиле:
 (3.7)
(3.7)
Среднее значение тока, проходящего через вторичную обмотку трансформатора, нагруженного ДПТ:
 (3.8)
(3.8)
где  – номинальный ток двигателя;
– номинальный ток двигателя;
 – номинальная мощность двигателя;
– номинальная мощность двигателя;
 – КПД двигателя.
– КПД двигателя.
Среднее значение тока через вентиль:
 (3.9)
(3.9)
где  – среднее значение тока, проходящего через фазу вторичной обмотки трансформатора.
– среднее значение тока, проходящего через фазу вторичной обмотки трансформатора.
Ударный ток вентиля принимается равным пусковому току двигателя постоянного тока
 (3.10)
(3.10)
где  – пусковой ток двигателя.
– пусковой ток двигателя.
На рис. 1.3. представлена принципиальная схема трехфазного выпрямителя с выводом нулевой точки трансформатора.
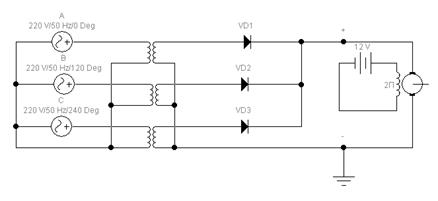
Рис. 1.3. Принципиальная схема трехфазного выпрямителя
с выводом нулевой точки трансформатора
На рис. 1.4. представлены осциллограммы выпрямленного напряжения и фазы А для трехфазного выпрямителя с выводом нулевой точки трансформатора.

Рис. 1.4. Осциллограммы выпрямленного напряжения
и фазы А для трехфазного выпрямителя с выводом нулевой точки трансформатора
3.1.1.3. Схема однофазного мостового выпрямителя
Средневыпрямленное значение напряжения (постоянная составляющая):
 (3.11)
(3.11)
где  – действующее значение ЭДС вторичной обмотки трансформатора.
– действующее значение ЭДС вторичной обмотки трансформатора.
– номинальное напряжение ДПТ.
Максимальное обратное напряжение на вентиле:
 (3.12)
(3.12)
Среднее значение тока, проходящего через вторичную обмотку трансформатора, нагруженного ДПТ:
(3.13)
где – номинальный ток двигателя;
– номинальная мощность двигателя;
– КПД двигателя.
Среднее значение тока через вентиль:
 (3.14)
(3.14)
где – среднее значение тока, проходящего через вторичную обмотку трансформатора.
Ударный ток вентиля принимается равным пусковому току двигателя постоянного тока
(3.15)
где – пусковой ток двигателя.
На рис. 1.5. представлена принципиальная схема однофазного управляемого выпрямителя мостового типа.
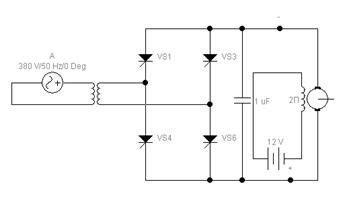
Рис. 1.5. Принципиальная схема однофазного мостового выпрямителя
На рис. 1.6. представлены осциллограммы выпрямленного напряжения и фазы А для однофазного выпрямителя мостового типа.

Рис. 1.6 Осциллограммы выпрямленного напряжения
и сетевого для однофазного мостового выпрямителя
3.1.1.4. Схема однофазного выпрямителя с выводом средней точки трансформатора
Средневыпрямленное значение напряжения (постоянная составляющая):
(3.16)
где – действующее значение ЭДС вторичной обмотки трансформатора.
– номинальное напряжение ДПТ.
Максимальное обратное напряжение на вентиле:
 (3.17)
(3.17)
Среднее значение тока, проходящего через вторичную обмотку трансформатора, нагруженного ДПТ:
(3.18)
где – номинальный ток двигателя;
– номинальная мощность двигателя;
– КПД двигателя.
Среднее значение тока через вентиль:
 (3.19)
(3.19)
где – среднее значение тока, проходящего через вторичную обмотку трансформатора.
Ударный ток вентиля принимается равным пусковому току двигателя постоянного тока
(3.20)
где – пусковой ток двигателя.
На рис. 1.7 представлена принципиальная схема однофазного выпрямителя с выводом нулевой точки трансформатора.
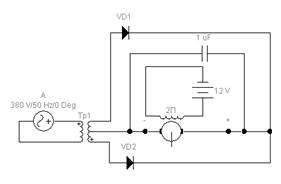
Рис. 1.7. Принципиальная схема однофазного выпрямителя
с выводом средней точки трансформатора
На рис. 1.8. представлены осциллограммы выпрямленного напряжения и фазы А для однофазного выпрямителя с выводом средней точки трансформатора.
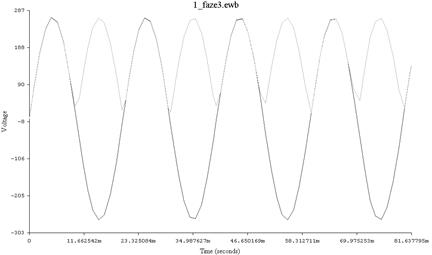
Рис. 1.8. Осциллограммы выпрямленного напряжения
и сетевого для однофазного выпрямителя с выводом средней точки трансформатора
РАСЧЕТ ИНВЕРТОРОВ
ПОРЯДОК РАСЧЕТА
Прил. 1.
Задания к выполнению курсового проекта
| Вариант | Тип управления | Тип преобразователя | Вентиль | Тип двигателя | Тип двигателя/ напряжение | Мощность двигателя, кВт | Скорость двигателя, об/мин | к.п.д./cos φ/kI |
| 1. | ШИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН225МУХЛ4 220 В | 7,5 | 1500 | 77 |
| 2. | ФИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН225МУХЛ4 220 В | 11 | 600 | 79,5 |
| 3. | ЧМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН225МУХЛ4 220 В | 15 | 750 | 80,5 |
| 4. | ФУ | Управляемый однофазный мостовой выпрямитель | Тиристор | ДПТ | 2ПН225МУХЛ4 220 В | 22 | 1000 | 82 |
| 5. | ФУ | Управляемый симистор (1 фаза) | Симистор | АД | АИРE 80В2 220 В | 2,2 | 2800 | 77/ 0,95/ 4,8 |
| 6. | ШИМ | Неуправляемый однофазный выпрямитель с выводом средней точки трансформатора | Диод | ДПТ | 2ПН225МУХЛ4 220 В | 37 | 1500 | 86,5 |
| 7. | ФИМ | Неуправляемый однофазный выпрямитель с выводом средней точки трансформатора | Диод | ДПТ | 2ПН225LУХЛ4 220 В | 18,5 | 750 | 83 |
| 8. | ЧМ | Неуправляемый однофазный выпрямитель с выводом средней точки трансформатора | Диод | ДПТ | 2ПН225LУХЛ4 220 В | 30 | 1060 | 84,5 |
| 9. | ФУ | Управляемый однофазный выпрямитель с выводом средней точки трансформатора | Транзистор | ДПТ | 2ПН225LУХЛ4 220 В | 45 | 1500 | 87,5 |
| 10. | ФУ | Управляемый симистор (1 фаза) | Тиристор | АД | АИРE 80В2 220 В | 3,0 | 2800 | 78/ 0,98/ 5,2 |
| 11. | ШИМ | Неуправляемый трехфазный мостовой выпрямитель | Диод | ДПТ | 2ПН250МУХЛ4 220 В | 55 | 1500 | 87 |
| 12. | ФИМ | Неуправляемый трехфазный мостовой выпрямитель | Диод | ДПТ | 2ПН250LГУХЛ4 220 В | 75 | 1500 | 89 |
| 13. | ЧМ | Неуправляемый трехфазный мостовой выпрямитель | Диод | ДПТ | 2П0200LУХЛ4 220 В | 17 | 1500 | 89 |
| 14. | ФУ | Управляемый трехфазный мостовой выпрямитель | Тиристор | ДПТ | 2П0200LУХЛ4 220 В | 24 | 2360 | 90 |
| 15. | ФУ | Управляемый симистор (3 фазы) | Симистор | АД | 4А160S2Y3 220/380 В | 15 | 3000 | 88/ 0,91/ 7,5 |
| 16. | ШИМ | Неуправляемый трехфазный выпрямитель с выводом нулевой точки трансформатора | Диод | ДПТ | 2П0200LУХЛ4 440 В | 7,5 | 750 | 83,5 |
| 17. | ФИМ | Неуправляемый трехфазный выпрямитель с выводом нулевой точки трансформатора | Диод | ДПТ | 2П0200LУХЛ4 440 В | 11 | 1000 | 87 |
| 18. | ЧМ | Неуправляемый трехфазный выпрямитель с выводом нулевой точки трансформатора | Диод | ДПТ | 2ПФ200LУХЛ4 440 В | 15 | 800 | 83,5 |
| 19. | ФУ | Управляемый трехфазный выпрямитель с выводом нулевой точки трансформатора | Транзистор | ДПТ | 2ПФ250МУХЛ4 440 В | 22 | 600 | 80 |
| 20. | ФУ | Управляемый симистор (3 фазы) | Тиристор | АД | 4А200М4УЗ 220/380 В | 37 | 1500 | 91/ 0,9/ 7,0 |
| 21. | ШИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН250LГУХЛ4 440 В | 28 | 750 | 83 |
| 22. | ФИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН225LУХЛ4 440 В | 18,5 | 750 | 83 |
| 23. | ЧМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН225LУХЛ4 440 В | 30 | 1060 | 84,5 |
| 24. | ФУ | Управляемый однофазный мостовой выпрямитель | Тиристор | ДПТ | 2ПН250LГУХЛ4 440 В | 45 | 1000 | 85,5 |
| 25. | ФУ | Управляемый симистор (3 фазы) | Симистор | АД | 4А20015УЗ 220/380 В | 22 | 750 | 88,5/ 0,84/ 6,0 |
| 26. | ШИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН250МУХЛ4 440 В | 55 | 1700 | 87 |
| 27. | ФИМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПН250LГУХЛ4 440 В | 71 | 1500 | 88,5 |
| 28. | ЧМ | Неуправляемый однофазный мостовой выпрямитель | Диод | ДПТ | 2ПФ250МУХЛ4, 440 В | 50 | 1500 | 87 |
| 29. | ФУ | Управляемый однофазный мостовой выпрямитель | Транзистор | ДПТ | 2ПН315LУХЛ4 440 В | 75 | 800 | 88 |
| 30. | ФУ | Управляемый симистор (3 фазы) | Тиристор | АД | 4A250S6Y3 220/380 В | 45 | 1000 | 91,5/ 0,89/ 7,0 |
| 31. | ЧУ | Управляемый однофазный мостовой инвертор тока | Транзистор | АД | АИРE 80В2 220/380 В | 3,0 | 2800 | 78/ 0,98/ 5,2 |
| 32. | ЧУ | Управляемый однофазный мостовой инвертор напряжения | Транзистор | АД | АИРE 80А2 220/380 В | 1,5 | 2800 | 76/ 0,95/ 4,8 |
| 33. | ЧУ | Управляемый однофазный мостовой инвертор тока | Транзистор | АД | АИРE 90L4 220/380 В | 2,2 | 1400 | 76/ 0,95/ 4,8 |
| 34. | ЧУ | Управляемый однофазный мостовой инвертор напряжения | Тиристор | АД | АИРE 80А4 220/380 В | 1,1 | 1400 | 71/ 0,95/ 4,0 |
| 35. | ФУ | Управляемый симистор (3 фазы) | Симистор | АД | 4А112М2УЗ 220/380 В | 7,5 | 3000 | 88,0/ 0,9/ 7,5 |
| 36. | ЧУ | Управляемый трехфазный мостовой инвертор тока | Транзистор | АД | 4А225М8УЗ 220/380 В | 30 | 750 | 90,0/ 0,81/ 6,0 |
| 37. | ЧУ | Управляемый трехфазный мостовой инвертор напряжения | Транзистор | АД | 4А200М4УЗ 220/380 В | 37 | 3000 | 91,0/ 0,90/ 7,0 |
| 38. | ЧУ | Управляемый трехфазный мостовой инвертор тока | Транзистор | АД | 4А20014УЗ 220/380 В | 45 | 1500 | 92,0/ 0,90/ 7,0 |
| 39. | ЧУ | Управляемый трехфазный мостовой инвертор напряжения | Тиристор | АД | 4А250М6УЗ 220/380 В | 55 | 1000 | 91,5/ 0,89/ 7,0 |
| 40. | ФУ | Управляемый симистор (3 фазы) | Тиристор | АД | 4А1Э2М4УЗ 220/380 В | 11 | 1500 | 87,5/ 0,87/ 7,0 |
| 41. | ЧУ | Управляемый трехфазный мостовой инвертор тока | Транзистор | АД | 4А112МВ6УЗ 220/380 В | 4,0 | 1000 | 82,0/ 0,81/ 6,0 |
| 42 | ЧУ | Управляемый трехфазный мостовой инвертор напряжения | Транзистор | АД | 4А1Э2М8УЗ 220/380 В | 5,5 | 750 | 83,0/ 0,74/ 6,0 |
| 43. | ЧУ | Управляемый трехфазный мостовой инвертор тока | Транзистор | АД | 4А160S2Y3 220/380 В | 15 | 3000 | 88,0/ 0,91/ 7,5 |
| 44. | ЧУ | Управляемый трехфазный мостовой инвертор напряжения | Тиристор | АД | 4А160М4УЗ 220/380 В | 18,5 | 1500 | 89,5/ 0,88/ 7,0 |
| 45. | ФУ | Управляемый симистор (3 фазы) | Симистор | АД | 4А160М6УЗ 220/380 В | 15 | 1000 | 87,5/ 0,87/ 6,0 |
Примечание: ШИМ – широтно-импульсная модуляция; ФИМ– фазоимпульсная модуляция; ЧМ – частотная модуляция; ФУ – фазовое управление; ЧУ – частотное управление; ДПТ – двигатель постоянного тока; АД – асинхронный двигатель.
Учебное издание
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению курсового проекта
по дисциплине «Микропроцессорные системы управления в электроэнергетике», часть 1
(для студентов, обучающихся по направлению
«Электроэнергетика и электротехника»,
профиль – «Электроснабжение»)
Составитель:
Дмитрий Васильевич Половинка
Авторская редакция
Оригинал-макет Д. В. Половинка
Издательство Луганского национального университета
имени Владимира Даля
Свидетельство о регистрации,
серия ДК №1620 от 18.12.2003
Адрес издательства: 91034, ЛНР, г. Луганск, кв. Молодежный, 20а
Телефон: 8(0642) 41-31-60. Факс: 8(0642) 41-34-12
 E-mail [email protected]
E-mail [email protected]
http: www.dahluniver.ru
| |
СТРУКТУРА КУРСОВОГО ПРОЕКТА
Курсовой проект по дисциплине «Микропроцессорные системы управления в электроэнергетике» выполняется по индивидуальным вариантам (см. прил. 1), которые выдаются студентам не позднее, чем за 1,5 месяца до их защиты. Курсовой проект состоит из 2-х чертежей, выполненных на листах формата А1, и пояснительной записки объемом 40-50 листов. В пояснительной записке тип и размер шрифта должен быть Times New Roman, 14 пт, интервал – 1,5 пт, заголовки – полужирными, заглавными буквами с отступом от основного текста 6 пт. Формулы и выполненные по ним расчеты должны быть набраны в редакторе формул с параметрами по умолчанию.
На первом листе располагается чертеж (А1) электрической принципиальной схемы управления объектом электропотребления. На втором листе располагаются два чертежа (2 х А2), на которых отображаются функциональная схема микропроцессорной системы и алгоритм для программы выбранного микроконтроллера. Чертежи должны быть выполнены в соответствии с единой системой конструкторской документации (ГОСТ 2.702-2011, ГОСТ 2.701-2008).
Пояснительная записка выполняется на листах формата А4 со штампом (15 мм) и состоит из реферата, содержания, введения, 4-х разделов, объемом до 12 стр. каждый, а также заключения, списка литературы и приложений. Первый лист каждого раздела (в т.ч. введение, заключение и реферат) должен быть со штампом 40 мм.
В реферате (1 стр.) указывается количество страниц, рисунков, таблиц и источников литературы пояснительной записки, а также ключевые слова (8-12 ключевых слов), (штамп –
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!