Рабочие характеристики исследуемого двигателя представлены на рис. 5 и построены по опытным данным табл. 1 и 2.




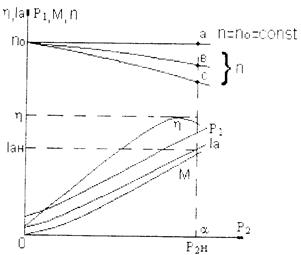
Рис. 5. Рабочие характеристики двигателя параллельного возбуждения со стабилизирующей обмоткой
Скоростные характеристики  строятся по данным табл. 3.
строятся по данным табл. 3.
Вид скоростной характеристики

определяется двумя факторами: падением напряжения в цепи
обмотки якоря  и изменением результирующего продольного потока
и изменением результирующего продольного потока  :
:
 ;
;  ,
,
где  – МДС от размагничивающего действия поперечной реакции якоря;
– МДС от размагничивающего действия поперечной реакции якоря;  – МДС стабилизирующей обмотки.
– МДС стабилизирующей обмотки.
Отключение стабилизирующей обмотки, а тем более ее встречное включение ослабляет результирующий магнитный поток, что приводит к менее устойчивой работе при резких изменениях нагрузки на валу двигателя. Правильность включения стабилизирующей обмотки следует определять по скоростным характеристикам, построенным по результатам опытов (рис. 6).





1 – встречное вкл.
2 – без стабил. обм.
3 – согласное вкл.

| |
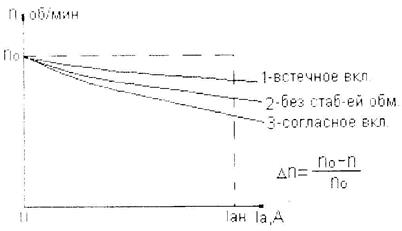
Рис. 6. Скоростные характеристики
Регулирование скорости вращения двигателя изменением
подводимого к якорю напряжения
Примерный вид зависимости n,  ,
,  при постоянном моменте и токе возбуждения приведен на рис. 8.7.
при постоянном моменте и токе возбуждения приведен на рис. 8.7.
Зависимость  .
.
Скорость вращения якоря при  и
и  изменяется в зависимости от напряжения линейно. Минимальное напряжение, при котором якорь начинает вращаться, равно некоторому пусковому напряжению (напряжению трогания)
изменяется в зависимости от напряжения линейно. Минимальное напряжение, при котором якорь начинает вращаться, равно некоторому пусковому напряжению (напряжению трогания)  при n = 0. Из формулы (8.9) при прямом включении в сеть имеем
при n = 0. Из формулы (8.9) при прямом включении в сеть имеем
 ,
,
откуда  , где – ток, соответствующий моменту
, где – ток, соответствующий моменту 
Якорь двигателя придет во вращение, как только приложенное напряжение станет больше внутреннего падения напряжения в якорной цепи:
 .
.
В диапазоне  двигатель оказывается нерегулируемым.
двигатель оказывается нерегулируемым.



































Рис. 7. Регулирование скорости вращения двигателя
параллельного возбуждения подводимым к якорю напряжением
при М = const и I в = const
Зависимость .
Рассмотренный способ регулирования осуществляется при практически неизменном значении КПД двигателя, так как
 .
.
Зависимость  .
.
Полезная мощность  изменяется при М = const и практически похожа на зависимость
изменяется при М = const и практически похожа на зависимость  .
.
Регулирование скорости вращения двигателя
изменением тока возбуждения
Полученные зависимости представлены на рис. 8.










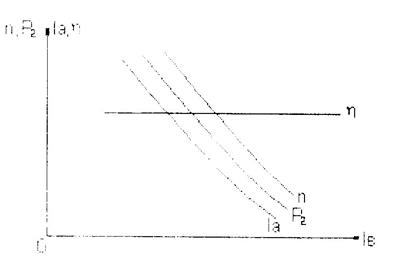
Рис. 8. Регулирование скорости вращения двигателя параллельного
возбуждения изменением тока возбуждения при  и М = const
и М = const
Если допустить, что магнитная цепь машины не насыщена, то  и, следовательно,
и, следовательно,
 ;
;
 ;
;
 .
.
Все эти зависимости при принятом допущении близки к гиперболам.
Регулирование скорости при принятых допущениях происходит при постоянном КПД:  .
.
Регулировочная характеристика двигателя
Примерный вид полученных зависимостей приведен на рис. 9. При постоянной скорости вращения полезная мощность на валу изменяется пропорционально моменту. Ток якоря растет быстрее момента из-за ослабления поля в соответствии с выражением
 .
.
При увеличении момента на валу для поддержания  ток возбуждения приходится изменять, т.к. с нагрузкой скорость двигателя падает.
ток возбуждения приходится изменять, т.к. с нагрузкой скорость двигателя падает.


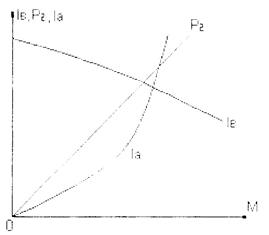
Рис. 9. Регулировочные характеристики двигателя
параллельного возбуждения при
Реостатные характеристики двигателя
Реостатные характеристики имеют вид кривых, представленных на рис. 10.




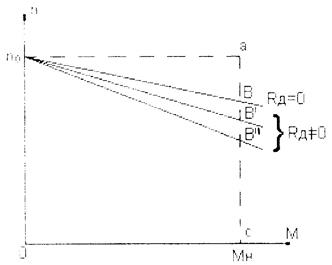
Рис. 10. Реостатные характеристики двигателя
параллельного возбуждения
Зависимость  при реостатном регулировании на основании формул (8.3) и (8.10) и с учетом того, что
при реостатном регулировании на основании формул (8.3) и (8.10) и с учетом того, что  , имеет следующее аналитическое выражение:
, имеет следующее аналитическое выражение:
 ,
,
где  – скорость холостого хода;
– скорость холостого хода;  – суммарное сопротивление цепи рабочего тока двигателя.
– суммарное сопротивление цепи рабочего тока двигателя.
Если пренебречь небольшим изменением магнитного потока вследствие реакции якоря, то при различных сопротивлениях представляется в виде пучка прямых, выходящих из одной точки ( при М = 0).
при М = 0).
Включение последовательно с якорем сопротивления приводит к уменьшению жесткости механических характеристик. Для каждого сопротивления жесткость характеристики рассчитывают по формуле
 .
.
Положительным свойством «реостатного» регулирования является то, что оно может осуществляться в достаточно широких пределах и технически легко осуществимо. Однако следует иметь в виду, что при этом происходят большие потери энергии в реостате, включенном последовательно с якорем двигателя.






