

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Введение
Компьютерные технологии стремительно развиваются, каждый день появляются новые технологии, улучшаются уже существующие. Одной из наиболее развивающихся областей является технология 3D сканирования.
3D-сканирование – это процесс создания цифровых трёхмерных моделей из реальных объектов методом сканирования. С помощью 3D-сканера можно выполнять сканирование различных физических предметов, получая их трехмерные цифровые модели. Полученные 3D модели могут быть задействованы в строительной и архитектурной сфере, в сфере дизайна, медицине и авиастроения. 3D сканер позволяет существенно сократить время создания трехмерных моделей объектов.
Актуальность данной темы заключается в том, что технология 3D сканирования является актуальной и необходима в изучении для большинства пользователей.
Целью данного дипломного проекта является разработка и создание 3D сканера на основе микроконтроллера в рамках микропроцессорных систем.
Для достижения поставленной цели дипломного проекта, решались следующие задачи:
а) Изучение ресурсов в сети Интернет и литературы на тему дипломного проекта;
б) Сравнение имеющихся способов реализации проекта с целью выбора наилучшего решения;
в) Сборка и настройка 3D сканера.
г) Настройка и оптимизация программного обеспечения и последующая проверка работоспособности системы.
Теоретическая часть
Виды 3D-сканеров
3D сканеры делятся на две большие группы: контактные и бесконтактные сканеры. Первые используют контактный способ сканирования, то есть они исследуют сканируемый предмет буквально на ощупь, записывая соответствующие координаты. Для этого в их конструкции предусмотрено наличие специального высокочувствительного щупа. Контактные сканеры обладают такими несомненными плюсами, как высокая детализация, независимость от световых условий, возможность сканирования призматической части объекта. В то же время они довольно медленные в работе и во время сканирования возникает риск повреждения каких-либо хрупких предметов. Пример контактного сканера представлен на рисунке 1.2.1.
|
|
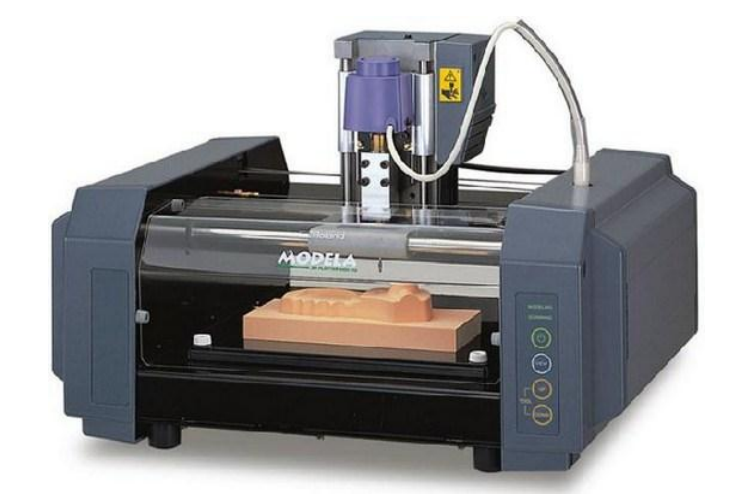
Рисунок 1.2.1 – Контактный плоттер/сканер 3D комбайн мDx-15
Вторые используют бесконтактный способ сканирования. Такие приборы бывают активными и пассивными. Активные устройства сами излучают специальные волны, после чего обнаруживают их отражение и анализируют для получения компьютерной модели. В качестве такого излучения может использоваться рентген, ультразвук или световые потоки. Например, рентгеновские лучи и ультразвук используются в сканерах, используемых в медицинских целях. Пассивные приборы не формируют никакого излучения, а лишь обнаруживают отраженное от объекта окружающее излучение. Например, свет в целом. Бесконтактные сканеры отличаются экономичностью, привлекательной технологией сканирования и возможностью использования вне помещений с различной степенью освещенности. Пример бесконтактного сканера представлен на рисунке 1.2.2.

Рисунок 1.2.2 – Бесконтактный 3D сканер Sense
Технологии сканирования тоже отличаются, но наибольшее распространение получили две технологии 3D сканирования: лазерная и оптическая. В лазерной технологии устройства основаны на действии лазера. При использовании таких приборов на сканируемый объект в определенных его точках наносятся особые светоотражающие маркеры, что позволяет обеспечить более высокую точность сканирования. Преимущество лазерных устройств состоит как раз в очень высокой точности создаваемых моделей. Однако лазерные приборы используются для сканирования исключительно статичных объектов и фактически не могут быть задействованы для получения моделей подвижных предметов (в этом случае процесс сканирования отнимает очень много времени). Благодаря тому, что лазерные сканеры дают возможность воссоздать невероятно точную модель, они применяются в разнообразных промышленных сферах, в частности, в машиностроении. Пример лазерного 3D сканера представлен на рисунке 1.2.3.
|
|

Рисунок 1.2.3 – Лазерный 3D сканер Creafrom Handysan 300
Лазерные сканеры оказываются практически бесполезными, когда требуется отсканировать объекты, находящиеся в движении. Например, осуществить сканирование человеческого тела для медицинских задач и тут на помощь приходят оптические приборы. Они осуществляют процесс сканирования предмета путем проецирования на него линий, формирующих своеобразный узор. Данные о поверхности предмета содержатся в искажениях формы проецируемой трехмерной картинки. Оптические устройства могут обладать высокой скоростью работы. Это автоматически устраняет проблему искажения компьютерной модели в случае движения сканируемого объекта. Кроме того, здесь не требуется наносить на предмет специальные метки. То есть оптические сканеры могут с успехом применяться для сканирования подвижных предметов или человеческого тела. Несмотря на то, что оптические приборы уступают по точности создания 3D моделей лазерным аналогам, они характеризуются большей универсальностью. В то же время и у них есть свои минусы. В частности, оптические устройства не способны осуществлять сканирование предметов с зеркальными или блестящими поверхностями. Пример оптического 3D сканера представлен на рисунке 1.2.4.

Рисунок 1.2.4 – Оптический 3D сканер Artec Eva
Использование такого технологичного прибора, как 3D сканер, может облегчить деятельность человека во многих сферах, в том числе и архитектурной визуализации. Это динамично развивающаяся технология, которая предоставляет уникальные возможности: от планирования медицинских операций и создания объемного дизайнмакета до контроля качества создаваемых изделий. 3D сканеры требуются во всех случаях, когда нужно определить форму предмета с большой точностью и в минимально короткие сроки.
Применение 3D сканеров
Индустрия развлечений.
|
|
3D-сканеры активно используются в индустрии развлечений для создания цифровых 3D-моделей в кинематографе и видеоиграх. Довольно часто создается физическая модель, которая затем сканируется для получения цифрового эквивалента, вместо того, чтобы создавать такую модель на компьютере. Если у создаваемая модель имеет аналог в реальном мире, то сканирование позволит создать трехмерную модель гораздо быстрее, чем разработка той же модели с помощью моделирования.
1.3.3 Обратная разработка (реверс-инжиниринг).
Обратное проектирование механических компонентов требует очень точной цифровой модели объектов, которые необходимо воссоздать. Это хорошая альтернатива тому, чтобы множество точек цифровой модели преобразовать в полигональную сетку, использовать набор плоских и кривых поверхностей или же, что идеально для механических компонентов, создавать объемную 3D модель. 3D-сканер можно использовать переноса цифровой модели объектов в цифровую модель. Также, как и призматическую конфигурацию, которую создают, используя координатно-измерительную машину. Призматическая конфигурация позволит определить простые размеры модели. Эти данные дополнительно обрабатываются специальными программами для обратной инженерии.
Культурное наследие.
Существует множество исследовательских проектов, которые были проведены с использованием трехмерного сканирования исторических объектов и артефактов для их документации и последующего анализа. В 1999 году две разных исследовательских группы начали сканировать статуи Микеланджело. Стэндфордский университет вместе, использовал обычный лазерный триангуляционный сканер, созданный компанией Cyberware специально для сканирования статуи Микеланджело во Флоренции. В частности, знаменитый Давид, «Рабы» и ещё четыре статуи из часовни Медичи. Сканирование производится с плотностью точек равной 0,25 мм, достаточной для того, чтобы увидеть следы от долота Микеланджело. Такое детальное сканирование предполагает получения огромного количества данных (около 32 гигабайт). Для их обработки потребовалось около 5 месяцев. Примерно в это же время работала исследовательская группа от компании IBM. Перед ними стояла задача сканирования скульптуры «Флорентийская пьета», чтобы получить не только геометрические данные, но и информацию о цвете. Цифровая модель, полученная сканирования Стэндфордским университетом, была полностью использована в 2004 году для дальнейшего восстановления статуи. Совместное использование 3D-сканирования и 3D-печати позволяет копировать реальные объекты, не используя технологии традиционного гипсового слепка, которые во многих случаях могут повредить ценный артефакт культурного наследия. Скульптура фигурки (рисунок 1.13.1) была оцифрована с помощью 3D-сканера, а полученные данные преобразовывали в программе MeshLab. Полученная цифровая 3D-модель была напечатана с помощью 3D-принтера, который позволяет создавать реальную копию исходного объекта.
|
|

Рисунок 1.13.1 – Пример копирования реального объекта с использованием технологий 3D-сканирования и 3D-печати
Выбор 3D сканера
Для дипломного проекта выбран 3D-сканер Ciclop. Этот тип сканера использует лазерную триангуляционную технологию сканирования. Внешний вид 3D-сканера представлен на рисунке 1.4.1.

Рисунок 1.4.1 – Лазерный 3D сканер Ciclop
Он позволяет сканировать объект и получать его цифровую модель, которую можно будет редактировать и использовать для 3D печати. Объект помещается на вращающуюся платформу. При вращении платформы, два линейных лазера освещают объект с двух противоположных углов. Затем камера сканирует освещаемый объект. Данные камеры используются для построения 3D облака точек объекта.
Краткая характеристика 3D сканера представлена в таблице 1.4.1.
Таблица 1.4.1 – характеристика 3D сканера Ciclop
| Наименование сканера | Область сканирования | Точность сканирования | Стоимость |
| BQ Ciclop | 205 мм | 0.5-5 мм от размеров детали | - |
По сравнению с промышленными сканерами, стоимость 3D сканера не высокая и является одним из доступных для приобретения. Такой сканер предназначен для сканирования не больших объектов, например, художественных фигурок или небольших деталей, для последующей печати на 3D принтере или получения 3D модели для использования при проектировании.
Используемые компоненты
а) Контроллер Arduino Nano
б) Веб камера Logitech C270
в) Два лазера 650nm 5mW Red Laser Line Module (12х36 мм)
г) Драйвер шагового двигателя A4988
д) Шаговый двигатель Nema 17 (1.7А 1,8 град/шаг) не длинее 40 мм
е) Конденсатор 100 Мкф 35В
ж) Резистор 10К
з) Блок питания 12В 1,5А
и) Шариковый подшипник 16014
к) Ø200 x 8 мм круглая база. Может напечатать из трёх частей?
л) Ø200 мм нескользящее покрытие
м) Шпильки М8
н) Гайки М8
о) Шайбы М8
|
|
п) Винты и гайки М3
р) Набор пластиковых деталей
с) Прямоугольный шахматный паттерн
Подбор комплектующих
Подбор шагового двигателя
Двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол. Вращение вала шагового двигателя состоит из малых перемещений – шагов. Шаговый двигатель NEMA 17 имеет плиту размером 1.7 x 1.7 дюйма (рисунок 1.6.1), он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.

Рисунок 1.6.1 – Шаговый двигатель NEMA 17
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1.8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на рисунке 1.6.2.

Рисунок 1.6.2 Схема расположения подводящих проводов
Шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17. Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1.8 градуса:
Steps per Revolution = 360/ step angle
360/1.8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17:
1) рабочее напряжение: 12V DC (12В постоянного тока);
2) угол за один шаг (Step Angle): 1.8 градуса;
3) 200 шагов за один полный оборот;
4) число фаз: 4;
5) длина двигателя: 1.54 дюйма;
6) диапазон рабочих температур: от -10 до 40 °C;
7) удерживающий крутящий момент: 22.2 oz-in.
Подбор лазера
Лазер снабжен особой линзой, преобразующей точечный свет в ровную линию. С помощью поворотной головки можно осуществлять корректировку толщины и контрастности линии. Внешний вид представлен на рисунке 1.6.5.
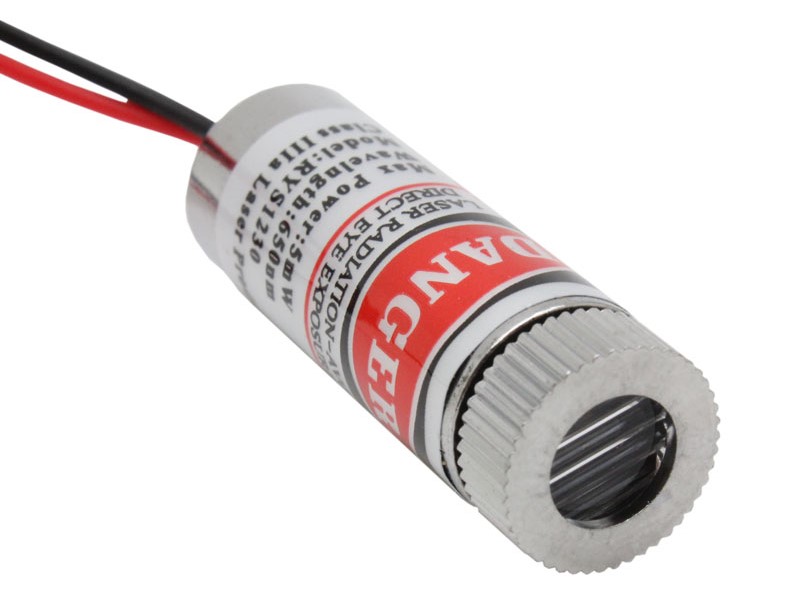
Рисунок 1.6.5 – Внешний вид лазера
Технические характеристики драйвера двигателя A4988:
1) напряжение питание: 4,5-5В;
2) потребляемый ток: до 35 мА;
3) длина волны: 650 нм;
4) габаритные размеры ДхШ: 35x12 мм;
5) длина проводов: 135 мм;
6) вес: 13,5 г.
Подбор web-камеры
Web-камера Logitech C270 имеет CMOS сенсор. Его общее резервное число составляет три мегапикселя. Разрешение матрицы составляет 1280х720 пикселей. Оно обеспечивает необходимую четкость изображения. Максимальная частота составляет 30 кадр/с. Проводная web-камера подключается с помощью универсального разъема USB. Устройство поддерживается Hi-Speed-интерфейсом USB 2.0. Он имеет пропускную способность до 480 Мбит/с. Габариты web-камеры составляют 70х69х32 мм (Рисунок 1.6.6).

Рисунок 1.6.6 – Внешний вид web-камеры Logitech C270
Подбор конденсатора
Электролитический конденсатор 100 мкФ 35 В 105°С в алюминиевом цилиндрическом корпусе, с однонаправленными проволочными гибкими выводами радиального типа (radial lead). Представленный конденсатор имеет полярный тип конструкции. Полярность выводов, номинальное напряжение и ёмкость, а также маркировка конденсатора указаны на корпусе с помощью краски. Определить где плюс или минус конденсатора можно по отметкам на корпусе или по длине выводов (минусовой вывод короткий). Допустимое отклонение ёмкости составляет ±20%. Радиальные электролитические конденсаторы широко применяются в блоках питания и зарядных устройствах, частотных преобразователях, аудио и бытовой аппаратуре. При установке конденсатора в электрическую цепь необходимо строго соблюдать полярность его полюсов, ёмкость и номинальное напряжение. Также необходимо обеспечить свободное пространство вокруг конденсатора для возможного срабатывания защитного клапана. Перед установкой конденсаторы следует разрядить, замыкая выводы через резистор сопротивлением 1кОм. На рисунке 1.6.7 представлен внешний вид конденсатора.

Рисунок 1.6.7 – Внешний вид конденсатора 100 Мкф 35В.
Технические характеристики драйвера двигателя A4988:
1) номинальная ёмкость: 100 Мкф;
2) номинальное напряжение: 35В;
3) рабочая температура: 85°C, 105°C;
4) габаритные размеры ДхШ: 6,3x11 мм;
5) допустимое отклонение емкости: ±20%;
6) вес: 5 г.
Подбор резистора
Выводные резисторы 10 кОм маркируются 4-мя цветными кольцами на корпусе. Каждый цвет формирует числовое значение сопротивления резистора. Первое кольцо (коричневого цвета) и второе кольцо (черного цвета) обозначают величину сопротивления в Омах, третье кольцо (оранжевого цвета) обозначает множитель этой величины. Последнее кольцо (золотистого или серебристого цвета) указывает на величину допуска резистора. На рисунке 1.6.8 изображена цветовая маркировка резистора сопротивлением 10 кОм и допуском ±5%.

Рисунок 1.6.8 – Цветовая маркировка резистора сопротивлением 10 кОм и допуском ±5%.
Подбор управляющей платы
Arduino Nano построена на микроконтроллере ATmega328P. Arduino Nano – это уменьшенный аналог Arduino Uno, отличается формфактором платы, которая в 2-2.5 раза меньше (19 x 43 мм), чем Arduino Uno (53 х 69 мм), в отсутствии силового разъема постоянного тока и работе через кабель Mini-B USB. Платформа Nano имеет контакты в виде пинов и легко устанавливается на макетную плату. На плате используется чип FTDI FT232RL для USB-Serial преобразования и применяется mini-USB кабель для связи с ардуино вместо стандартного. Связь с различными устройствами обеспечивают UART, I2C и SPI интерфейсы. На рисунке 1.6.9 представлен внешний вид платы Arduino Nano.

Рисунок 1.6.9 – Внешний вид платы Arduino Nano.
Технические характеристики драйвера двигателя A4988:
1) рабочее напряжение: 5В;
2) напряжение питания: 7-12В;
3) цифровые входы/выходы: 14;
4) аналоговые входы: 8;
5) ШИМ (PWM) пины: 6;
6) постоянный ток через вход/выход: 40 мА;
7) максимальный выходной ток вывода 3.3V: 50 мА;
8) flash-память: 32Кб из которых 2 Кб используются загрузчиком;
9) SRAM: 2Кб;
10) EEPROM: 1Кб;
11) тактовая частота: 16 МГц;
12) встроенный светодиод: 13;
13) длина: 45 мм;
14) ширина: 18 мм;
15) вес: 7г.
Arduino IDE
Arduino IDE – это программная среда разработки, использующая C++ и предназначенная для программирования всех плат ряда Ардуино (Arduino).
Аббревиатура IDE расшифровывается как Integrated Development Environment, в переводе – интегрированная среда разработки. С помощью этой среды программисты пишут программы, причем делают это гораздо быстрее и удобнее, чем при использовании обычных текстовых редакторов, хотя их тоже можно использовать для написания кода программ.
Arduino IDE позволяет составлять программы удобном текстовом редакторе, компилировать их в машинный код, и загружать на все версии платы Arduino. Приложение является полностью бесплатным, а скачать его можно на официальном сайте сообщества Arduino.
XLoader
Программа, которая предназначена для загрузки HEX прошивки на плату Arduino.
Horus
Horus – это программное обеспечение с открытым исходным кодом для 3D-сканирования, разработано кампанией BQ и выпущено для сообщества под лицензией GPLv2. Horus был написан на языке программирования Python.
Это приложение предлагает графический пользовательский интерфейс для подключения, управления, настройки, калибровки и сканирования объекта с помощью 3D-сканера с открытым исходным кодом. Также он содержит визуализацию трехмерных облаков точек в реальном времени.
Экономическая часть
Охрана труда
1.
2.
3.
4.
4.1. Общие требования безопасности при работе с ПК
К работе на персональном компьютере допускаются лица, прошедшие обучение безопасным методам труда, вводный инструктаж, первичный инструктаж на рабочем месте.
При эксплуатации персонального компьютера на работника могут оказывать действие следующие опасные и вредные производственные факторы:
а) Повышенный уровень электромагнитных излучений;
б) Повышенный уровень статического электричества;
в) Пониженная ионизация воздуха;
г) Статические физические перегрузки;
д) Перенапряжение зрительных анализаторов.
Работник обязан:
а) Выполнять только ту работу, которая определена его должностной инструкцией;
б) Содержать в чистоте рабочее место;
в) Соблюдать режим труда и отдыха в зависимости от продолжительности, вида и категории трудовой деятельности;
г) Соблюдать меры пожарной безопасности.
Рабочие места с компьютерами должны размещаться таким образом, чтобы расстояние от экрана одного монитора до тыла другого было не менее 2,0 м, а расстояние между боковыми поверхностями мониторов - не менее 1,2 м.
Рабочие места с персональными компьютерами по отношению к световым проемам должны располагаться так, чтобы естественный свет падал сбоку, преимущественно слева.
Оконные проемы в помещениях, где используются персональные компьютеры, должны быть оборудованы регулируемыми устройствами типа жалюзи, занавесей, внешних козырьков.
Рабочая мебель для пользователей компьютерной техникой должна отвечать следующим требованиям:
а) Высота рабочей поверхности стола должна регулироваться в пределах 680 - 800 мм. При отсутствии такой возможности высота рабочей поверхности стола должна составлять 725 мм;
б) Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, глубиной на уровне колен не менее 450 мм и на уровне вытянутых ног не менее 650 мм;
в) Рабочий стул (кресло) должен быть подъемно-поворотным и регулируемым по высоте и углам наклона сиденья и спинки, а также расстоянию спинки от переднего края сиденья;
г) Рабочее место должно быть оборудовано подставкой для ног, имеющей ширину не менее 300 мм, глубину не менее 400 мм, регулировку по высоте в пределах до 150 мм и по углу наклона опорной поверхности подставки до 20 градусов. Поверхность подставки должна быть рифленой и иметь по переднему краю бортик высотой 10 мм.
За невыполнение данной Инструкции виновные привлекаются к ответственности согласно правилам внутреннего трудового распорядка или взысканиям, определенным Кодексом законов о труде Российской Федерации.
Работнику при работе c компьютером запрещается:
а) Прикасаться к задней панели системного блока при включенном питании;
б) Переключать разъемы интерфейсных кабелей периферийных устройств при включенном питании;
в) Допускать попадание влаги на поверхность системного блока, монитора, рабочую поверхность клавиатуры, принтеров и других устройств;
г) Отключать оборудование от электросети.
Продолжительность непрерывной работы с компьютером без регламентированного перерыва не должна превышать 2-х часов.
Во время регламентированных перерывов с целью снижения нервно-эмоционального напряжения, утомления зрительного анализатора, устранения влияния гиподинамии и гипокинезии, предотвращения развития монотонического утомления выполнять комплексы упражнений.
4.2. Общие требования охраны труда при работе с паяльником
К выполнению работ по пайке паяльником допускаются работники в возрасте не моложе 18 лет, прошедшие обучение, инструктаж и проверку знаний по охране труда, освоившие безопасные методы и приемы выполнения работ, методы и приемы правильного обращения с приспособлениями, инструментами и грузами.
Работники, выполняющие пайку паяльником, должны иметь II группу по электробезопасности.
В случае возникновения в процессе пайки паяльником каких-либо вопросов, связанных с ее безопасным выполнением, работник должен обратиться к своему непосредственному или вышестоящему руководителю.
При пайке паяльником на работника могут воздействовать опасные и вредные производственные факторы:
а) повышенная загазованность воздуха рабочей зоны парами вредных химических веществ;
б) повышенная температура поверхности изделия, оборудования, инструмента и расплавов припоев;
в) повышенная температура воздуха рабочей зоны;
г) пожароопасность;
д) брызги припоев и флюсов;
Требования безопасности во время работы
Во время работы необходимо:
а) Содержать рабочее место в чистоте, не допускать его загромождения.
б) При выполнении работ соблюдать принятую технологию пайки изделий.
в) Паяльник, находящийся в рабочем состоянии, устанавливать в зоне действия местной вытяжной вентиляции.
г) Паяльник на рабочих местах устанавливать на огнезащитные подставки, исключающие его падение.
д) Нагретые в процессе работы изделия и технологическую оснастку размещать в местах, оборудованных вытяжной вентиляцией.
е) При пайке крупногабаритных изделий применять паяльник со встроенным отсосом.
ж) Для перемещения изделий применять специальные инструменты (пинцеты, клещи или другие инструменты), обеспечивающие безопасность при пайке.
з) Сборку, фиксацию, поджатие соединяемых элементов, нанесение припоя, флюса и других материалов на сборочные детали проводить с использованием специальных приспособлений или инструментов, указанных в технологической документации.
и) Излишки припоя и флюса с жала паяльника снимать с применением материалов, указанных в технологической документации (хлопчатобумажные салфетки, асбест и другие).
к) Пайку малогабаритных изделий в виде штепсельных разъемов, наконечников, клемм и других аналогичных изделий производить, закрепляя их в специальных приспособлениях, указанных в технологической документации (зажимы, струбцины и другие приспособления).
л) Во избежание ожогов расплавленным припоем при распайке не выдергивать резко с большим усилием паяемые провода.
м) Паяльник переносить за корпус, а не за провод или рабочую часть. При перерывах в работе паяльник отключать от электросети.
н) При нанесении флюсов на соединяемые места пользоваться кисточкой или фарфоровой лопаточкой.
о) При проверке результатов пайки не убирать изделие из активной зоны вытяжки до полного его остывания.
п) Изделия для пайки паяльником укладывать таким образом, чтобы они находились в устойчивом положении.
р) На участках пайки паяльником не производить прием и хранение пищи, а также курение.
Требования охраны труда в аварийных ситуациях
В аварийных ситуациях необходимо:
1) При обнаружении неисправной работы паяльника отключить его от питающей электросети и известить об этом своего непосредственного или вышестоящего руководителя.
2) При травмировании, отравлении и внезапном заболевании работника оказать ему первую (доврачебную) помощь и, при необходимости, организовать доставку в учреждение здравоохранения.
3) При поражении электрическим током работника принять меры к скорейшему освобождению пострадавшего от действия тока.
4) При возникновении пожара:
а) прекратить работу;
б) отключить электрооборудование;
в) сообщить непосредственному или вышестоящему руководителю о пожаре;
г) сообщить о пожаре в пожарную охрану;
д) принять по возможности меры по эвакуации работников, тушению пожара и сохранности материальных ценностей.
Требования безопасности по окончанию работы
По окончании работы необходимо:
а) Отключить от электросети паяльник, пульты питания, освещение.
б) Отключить местную вытяжную вентиляцию.
в) Неизрасходованные флюсы убрать в вытяжные шкафы или в специально предназначенные для хранения кладовые.
г) Привести в порядок рабочее место, сложить инструменты и приспособления в инструментальный ящик.
д) Снять спецодежду и другие средства индивидуальной защиты и повесить их в специально предназначенное место.
е) Вымыть руки и лицо теплой водой с мылом, при возможности принять душ.
Электробезопасность
Защитное заземление
Защитное заземление – преднамеренное электрическое соединение с землей или ее эквивалентом металлических нетоковедущих частей, которые могут оказаться под напряжением.
Назначение защитного заземления – устранение опасности поражения людей электрическим током при появлении напряжения на конструктивных частях электрооборудования, т.е. при замыкании на корпус.
Принцип действия защитного заземления – снижение до безопасных значений напряжений прикосновения и шага, обусловленных замыканием на корпус. Это достигается уменьшением потенциала заземленного оборудования, а также выравниванием потенциалов за счет подъема потенциала основания, на котором стоит человек, до потенциала, близкого по значению к потенциалу заземленного оборудования.
Именно этот вид обеспечения электробезопасности персонала был использован мною при разработке данного дипломного проекта.
4.3.2
Ограждающие средства защиты
Предназначены, для временного ограждения токоведущих частей (временные переносные ограждения-щиты, ограждения клетки, изолирующие накладки, изолирующие колпаки); для предупреждения ошибочных операций (предупредительные плакаты); для временного заземления отключенных токоведущих частей с целью устранения опасности поражения работающих током при случайном появлении напряжения (временные заземления).
Книги
1. Петин В.А., Проекты, использованные базе Arduino. ДМК-Пресс. 2018 – 24с.
Электронные ресурсы
1) 3D сканеры – принцип их работы и применение. [Электронный ресурс] // URL: https://fotokomok.ru/3d-skanery-princip-raboty-i-primenenie/ (дата обращения 26.04.22).
2) Всё о 3D сканерах: от разновидностей до применения. [Электронный ресурс] // URL: https://can-touch.ru/vse-o-3d-skanerax/? (дата обращения 04.05.22).
3) Сравнение плат Arduino. [Электронный ресурс] // URL: https://arduino-technology.ru/articles/arduino-boards/? (дата обращения 10.05.22).
4) Инструкция по охране труда при работе с паяльником. [Электронный ресурс] // URL: https://travmatizma.net/instrukciya-po-oxrane-truda-pri-vypolnenii-payalnyx-rabot/? (дата обращения 25.05.22).
Список сокращений
CAD – Computer-aided design;
IBM – International Business Machines;
USB – Universal Serial Bus;
FTDI – Future Technology Devices International;
SPI – Serial Peripheral Interface;
I2C – Inter-Integrated Circuit;
UART – Universal asynchronous receiver/transmitter;
ШИМ – Широтно-импульсная модуляция;
EEPROM – Electrically erasable programmable read-only memory;
HEX – Hexadecimal numeral system;
SRAM – Static Random Access Memory;
IDE – Integrated Development Environment;
GPL – General Public License;
ПК – Персональный компьютер.
Введение
Компьютерные технологии стремительно развиваются, каждый день появляются новые технологии, улучшаются уже существующие. Одной из наиболее развивающихся областей является технология 3D сканирования.
3D-сканирование – это процесс создания цифровых трёхмерных моделей из реальных объектов методом сканирования. С помощью 3D-сканера можно выполнять сканирование различных физических предметов, получая их трехмерные цифровые модели. Полученные 3D модели могут быть задействованы в строительной и архитектурной сфере, в сфере дизайна, медицине и авиастроения. 3D сканер позволяет существенно сократить время создания трехмерных моделей объектов.
Актуальность данной темы заключается в том, что технология 3D сканирования является актуальной и необходима в изучении для большинства пользователей.
Целью данного дипломного проекта является разработка и создание 3D сканера на основе микроконтроллера в рамках микропроцессорных систем.
Для достижения поставленной цели дипломного проекта, решались следующие задачи:
а) Изучение ресурсов в сети Интернет и литературы на тему дипломного проекта;
б) Сравнение имеющихся способов реализации проекта с целью выбора наилучшего решения;
в) Сборка и настройка 3D сканера.
г) Настройка и оптимизация программного обеспечения и последующая проверка работоспособности системы.
Теоретическая часть
Общие сведения о 3D-сканерах
3D-сканер представляет собой специальное устройство, которое анализирует определённый физический объект или пространство, для получения данных о форме сканируемого объекта и, в некоторых случаях, о его внешнем виде (к примеру, о цвете). Собранные данные в дальнейшем применяются для создания цифровой трехмерной модели этого объекта. Существуют различные технологии для реализации 3D-сканера, различающиеся между собой определёнными преимуществами и недостатками, а также стоимостью. К тому же, существуют некоторые ограничения по объектам, которые могут быть оцифрованы. В частности, для определенных технологий возникают трудности с блестящими, прозрачными или обладающими зеркальными поверхностями предметами. Сбор 3D-данных важен и для других применений. Так, они необходимы в индустрии развлечений для создания фильмов и видеоигр. Также эта технология востребована в промышленном дизайне, ортопедии и протезировании, реверс-инжиниринге, разработке прототипов, а также для контроля качества, осмотре и документировании культурных артефактов. Задача 3D-сканера состоит в том, чтобы создать облако точек на поверхности объекта. В дальнейшем эти точки могут быть экстраполированы для воссоздания формы предмета (процесс, называемый реконструкцией), более подробно основные этапы реконструкции описаны ниже. Если в процессе сканирования были получены данные и о цвете, то и цвет реконструированной поверхности также можно определить. 3D-сканеры имеют сходство с обычными камерами. В частности, у них есть конусообразное поле зрения, и они могут получать информацию только с тех поверхностей, которые не были затемнены. Различия между двумя этими устройствами в том, что камера передаёт только информацию о цвете поверхности, что попала в ее поле зрения, 3D-сканер собирает информацию о расстояниях на поверхности, которая также пребывает в его поле зрения. Таким образом «картинка», полученная с помощью 3D-сканера, описывает расстояние до поверхности в каждой точке изображения. Это позволяет определить положение каждой точки на картинке сразу в 3 плоскостях. В большинстве случаев для получения информации о форме объекта, для создания полноценной модели, необходимо выполнить несколько этапов сканирования. Как правило, большое множество сканирований с разных направлений понадобится для того, чтобы получить информацию обо всех сторонах объекта. Все результаты сканирования должны быть приведены к одной системе координат – процесс, называемый привязкой изображений, и только после этого создаётся модель объекта. Вся процедура от простой карты с расстояниями до полноценной модели называется 3D конвейер сканирования. Существует несколько технологий для цифрового сканирования формы и создание 3D-модели объекта. Однако существует специальная классификация 3D-сканеров, которая делит 3D-сканеры на два основных типа: контактные и бесконтактные. В свою очередь, бесконтактные 3D-сканеры можно классифицировать ещё на две группы – активные и пассивные.
Виды 3D-сканеров
3D сканеры делятся на две большие группы: контактные и бесконтактные сканеры. Первые используют контактный способ сканирования, то есть они исследуют сканируемый предмет буквально на ощупь, записывая соответствующие координаты. Для этого в их конструкции предусмотрено наличие специального высокочувствительного щупа. Контактные сканеры обладают такими несомненными плюсами, как высокая детализация, независимость от световых условий, возможность сканирования призматической части объекта. В то же время они довольно медленные в работе и во время сканирования возни<
|
|
|

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!