

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Распространение звука в воздухе
Звуковые колебания в отличие от электромагнитных могут распространяться только в какой-либо упругой среде.
В общем случае скорость распространения звука зависит от изменений плотности упругой среды (ρ) в пространстве и времени,
давления (P) и температуры среды, а также от локальных изменений скорости отдельных частиц упругой среды. Скорость распространения ультразвуковых волн в газовой среде (С) определяется следующим выражением:
C=(k× P/ ρ)1/2 = λ× f,
где P обозначает давление газовой среды;
р — плотность упругой среды;
X и f — соответственно длина волны и частота ультразвуковых колебаний;
к — адиабатический коэффициент для газов.
Для воздуха адиабатический коэффициент равен 1,4, а плотность имеет значение 1,29 кг/м3 при давлении 1013 гПа.
Так как плотность воздуха уменьшается с увеличением температуры, то и скорость распространения звука в воздухе (Св) является зависимым от температуры параметром. Для воздуха эта зависимость может быть представлена в следующем виде:
СВ=с0×(1+ T/273)1/2,
где с0 = 331,6 м/с (скорость распространения звука в воздухе при T = 0°C), а T — текущее значение температуры воздуха, представленное в градусах Цельсия.
Относительное изменение скорости распространения звука, как следует из этой формулы, составляет примерно 0,17% на один градус. В табл. 1 представлена зависимость скорости распространения звука в воздухе от температуры.
Скорость распространения звука в воздушной среде существенно зависит и от давления воздуха: c ростом давления она увеличивается, а максимальное значение относительного изменения скорости звука во всём диапазоне колебания атмосферного давления на уровне моря составляет примерно 5%.
|
|
На рис. 1 представлена зависимость скорости звука от температуры и давления воздуха.
|
|
| Таблица 1. Зависимость скорости распространения звука в воздухе от температуры |
Кроме того, скорость звука зависит от состава воздуха, например от процентного содержания CO2 в воздухе, и относительной влажности. 
Влияние относительной влажности является меньшим, чем влияние температуры или давления, и вносит максимальное дополнительное изменение скорости звука (сравниваются скорости в сухом и влажном насыщенном воздухе) около 2% [1].
Мембранный преобразователь
Упругая мембрана, выполненная, например, из металла, возбуждается c собственным циклом колебаний пьезокерамическим элементом (рис. 4).
Основные характеристики:
• широкая диаграмма направленности излучения;
• относительно низкая частота;
• низкий уровень звуковых сигналов;
• узкая полоса пропускания (резонансная система);
• большое время затухания;
• открытая конструкция (высокое напряжение).
Электронная часть датчика
Для того чтобы ультразвуковой преобразователь был способен воспринимать входные воздействия и представлять их в виде, приемлемом для дальнейшей обработки, ему необходимо добавить некоторые дополнительные компоненты; только после этого полученное интегрированное устройство можно назвать датчиком.
Основными компонентами электронной части ультразвуковых датчиков фирмы Pepperl+Fuchs являются блоки излучателя и приёмного усилителя (рис. 9).
Блок излучателя
Излучатель включает в себя электронный ключ, генератор колебаний и усилительный выходной каскад, с выхода которого выдаётся напряжение 250 В, требуемое для возбуждения пьезокерамического элемента. Генератор предварительно настраивается на резонансную частоту ультразвукового преобразователя. Резонансная частота зависит от типа датчика: она лежит в диапазоне до 70 кГц для преобразователей с зоной срабатывания до 6 м и в диапазоне до 170 кГц для преобразователей с зоной срабатывания 1 м. Электронный ключ включает и выключает генератор в зависимости от длительности импульса запуска, тем самым формируются последовательности импульсов излучения разной длины.
|
|
Блок приёмного усилителя
Приёмник состоит из ограничителя, усилителя с регулируемым коэффициентом усиления, селективного усилителя, выходного усилительного каскада и компаратора.
Сигнал принимаемый от ультразвукового преобразователя, может иметь амплитуду в диапазоне от нескольких вольт. Для обеспечения возможности дальнейшей обработки ограничитель отсекает амплитуды принимаемых сигналов до значений, не превышающих +0,7 В; это также защищает усилитель от слишком высокого напряжения. Сигналы, отражённые от фона, подавляются на усилителе с регулируемым коэффициентом усиления. Этот же усилитель совместно со схемой управления усилением препятствует уменьшению амплитуды отражённого сигнала при увеличении расстояния между измеряемым объектом и датчиком. Назначение селективного усилителя заключается в том, чтобы отфильтровывать случайные (паразитные, побочные) ультразвуковые сигналы и пропускать к дальнейшей обработке только полезный сигнал. Этот сигнал демодулируется, детектируется и только затем полученная огибающая усиливается.
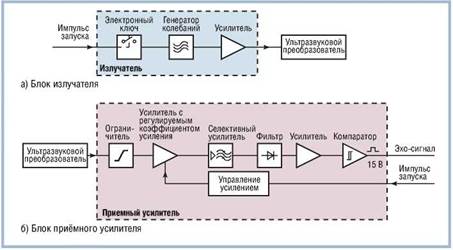 |
Рис. 9. Блок-схемы излучателя и приёмного усилителя
Амплитуда огибающей сравнивается с предварительно установленным порогом на компараторе; в случае когда пороговое напряжение превышено, на выходе возникает импульс, равный по амплитуде напряжению питания, и передаётся для обработки в электронную схему.
Блок обработки и управления
Кроме излучателя и приёмника, современный ультразвуковой датчик должен иметь в своём составе электронную схему обработки сигнала и управления распределением временных интервалов и функционированием выходного каскада датчика (рис. 10). Так как электронная часть датчика должна решать сложные задачи управления, предпочтительнее применять микропроцессорную схему. Дополнительным преимуществом в данном случае является то, что алгоритм обработки может быть не жёстко установленным, а гибким и реализованным в виде программы. Одна и та же микропроцессорная схема может применяться для управления разнообразными выходными каскадами или выполнять обработку сигналов по разным алгоритмам.
|
|
|
|
Рис. 10. Блок-схема ультразвукового датчика 
Функциями, которые выполняются встроенным контроллером, обычно являются генерирование тактовой частоты, управление длительностью излучаемого импульса, определение времени распространения отражённого сигнала, распознавание сигналов помехового происхождения, управление выходным каскадом и самодиагностика. Кроме того, контроллер может устанавливать связь с центральным компьютером через соответствующий интерфейс.
Конструктивное исполнение
Многие ультразвуковые датчики фирмы Pepperl+Fuchs имеют традиционную для данного типа изделий конструкцию. Исключение составляют датчики в прямоугольном корпусе типа VariKont.
Датчик в прямоугольном корпусе состоит из трёх частей: узла измерительного преобразователя с аналоговыми каскадами излучателя и приёмника, узла с контроллером и выходным каскадом, основания с терминальным отсеком для подключения электрических входных и выходных сигналов. Часть корпуса, в которой размещён ультразвуковой преобразователь, может быть установлена под разными углами относительно основания корпуса, что позволяет при жёстко зафиксированном основании контролировать различные направления в пространстве. Ультразвуковой преобразователь встроен в корпус датчика и герметизизирован пенополиуретаном. Разъёмное соединение между основной частью корпуса, которая вмещает всю электронику, и основанием позволяет осуществлять ремонт или замену узлов датчика без его демонтажа.
Основные принципы работы
Преобразователь посылает пачку ультразвуковых импульсов и формирует напряжении
соответствующее принятому отражённому сигналу. Встроенный контроллер вычисляет расстояние по
 |
|
|
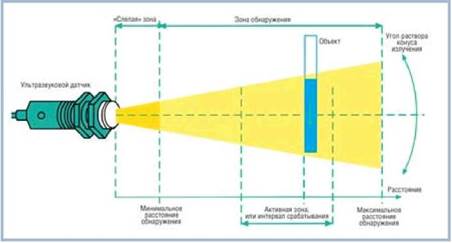
Рис.12. Зона обнаружения ультразвукового датчика
Встроенный контроллер вычисляет расстояние по
времени распространения эхо-сигнала и скорости звука. Длительность излучаемого импульса и время затухания колебаний (переходных процессов) ультразвукового преобразователя определяют размер «слепой» зоны, в которой датчик не может обнаружить объект.
Частота ультразвуковых колебаний лежит в диапазоне от 65 до 400 кГц в зависимости от типа датчика; частота повторения пачек импульсов находится между 14 и 140 Гц.
Важнейшей характеристикой ультразвукового датчика является размер зоны обнаружения (рис. 12). Зона ограничена минимальным и максимальным расстояниями обнаружения, значения которых зависят от параметров преобразователя. Максимальное расстояние обнаружения указывается в коде маркировки датчика.
В зависимости от используемых методов различают несколько типов ультразвуковых датчиков, основными из которых являются датчики, осуществляющие измерение времени, затрачиваемого звуком на распространение до измеряемого объекта и обратно (непосредственное обнаружение), и датчики, выполняющие проверку приёма переданного сигнала (ретрорефлективный, или рефлекторный метод).
Ретрорефлективный метод
 |
Посредством этого метода также возможно определять объекты из звукопоглощающих материалов.
Рис. 13. Принцип непосредственного обнаружения объекта датчиком
с раздельными излучателем и приёмником
Метод прерывания луча
Этот метод характеризуется большой дальностью обнаружения, так как в данном случае для определения местоположения объекта ультразвуковая волна должна пройти расстояние между излучателем и приёмником только в одном направлении (рис. 15). Помехоустойчивость этого метода лучше, чем у метода непосредственного обнаружения, потому что обрабатывается излучённый, а не отражённый ультразвуковой импульс.
Однако реализация метода прерывания луча требует более высоких затрат.
|
|
Датчики, работающие по прерыванию луча, иногда называют барьерными. Они более предпочтительны для использования внутри помещений по сравнению с датчиками, реализующими метод непосредственного обнаружения.
Сравнение методов
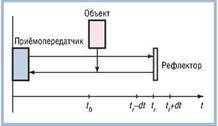 |
Рис. 14. Принцип обнаружения объекта по ретрорефлективному методу
Рис. 15. Принцип обнаружения объекта по методу прерывания луча
 |
Ретрорефлективный датчик постоянно контролирует расстояние между ультразвуковым излучателем и рефлектором с фиксированным положением. Электронная схема обработки и управления (встроенный контроллер) измеряет время прохождения сигнала. В случае когда соответствующее измеренному времени расстояние оказывается отличным от фиксированного расстояния до рефлектора, выходной электронный ключ переключается. Из-за неизбежных изменений в воздушной среде скорость звука может колебаться в определённых пределах, поэтому при измерении времени необходимо вводить соответствующую внешним условиям поправку (tr ± dt), которая затем учитывается при определении расстояний до рефлектора или объекта (рис. 14).
При определении частоты повторения импульсов (f) рассматриваются три возможных случая:
• объект обнаружен;
• объект не обнаружен;
• эхо-сигнал не поступает в детектор.
В первом случае частота следования импульсов равна
f= 1/(2×t0),
где t0 — время прохождения ультразвукового импульса от датчика до объекта.
Во втором случае частота следования импульсов меньше, чем в первом случае, и вычисляется по удвоенному времени прохождения ультразвукового импульса от датчика до рефлектора (tr):
f= 1/(2×tr).
Третий случай возможен в ситуациях, когда объект обладает свойствами поглощения звука или имеет наклонную поверхность, которая отражает ультразвуковую волну в направлении, отличном от направления на детектор. В этом случае спустя время (tr + dt), которое соответствует максимальному времени прохождения ультразвукового импульса до рефлектора, излучается очередной импульс, как если бы объект отсутствовал в зоне обнаружения датчика:
f=1/(2×(tr+dt)).
Одним из недостатков ретрорефлек-тивного метода является то, что ультразвуковая волна должна пройти от датчика до рефлектора (объекта) и обратно, что в два раза увеличивает время отклика по сравнению с системами, основанными на методе прерывания (ослабления) луча ультразвука (барьерные системы). Другим недостатком является то, что из-за высокого уровня затухания волны на двойном отрезке пути данный метод применим только при относительно небольших расстояниях между датчиком и рефлектором.
При реализации метода прерывания луча детектор и излучатель располагаются строго друг против друга. Вследствие вдвое меньшего расстояния, которое проходит ультразвуковой импульс, и существенно меньших потерь на распространение максимальное расстояние обнаружения для данного объекта в 2,5… 3 раза больше, чем для ретрорефлективного.
Минимальное расстояние обнаружения для метода прерывания луча зависит от времени реакции преобразователя и связанной с ним электронной части и находится в пределах нескольких сантиметров.
Время прохождения луча измеряется с момента излучения ультразвукового импульса. Электронная схема обработки и управления анализирует поступающие импульсы только в пределах времени распространения tE, которое соответствует расстоянию между излучателем и приёмником (рис. 15). Если луч прерывается, то последующие импульсы не регистрируются приёмником и электронная схема переключает выходной каскад датчика, после чего новый цикл измерения инициируется через промежуток времени (tE + dt). Если ультразвуковой луч не прерывается, то новый измерительный цикл начинается через промежуток времени tE. Так что независимо от того, прерывается луч или нет, частота следования импульсов (F) сохраняется почти постоянной:
F=1/(tE+dt)≈1/tE.
Для того чтобы подавить помехи, электронная схема обработки и управления инициирует задержку переключения дискретного выхода на время, соответствующее нескольким полезным отражённым сигналам. Это повышает помехоустойчивость датчика, но снижает максимальную частоту переключения барьерной системы.
Для дополнительного подавления помех электронная схема обработки изменяет длительность синхронизирующих импульсов в зависимости от рас стояния между излучателем и приёмником.
 Таблица 2. Основные технические данные ультразвуковых датчиков серии 18GK c одним
Таблица 2. Основные технические данные ультразвуковых датчиков серии 18GK c одним
дискретным выходом
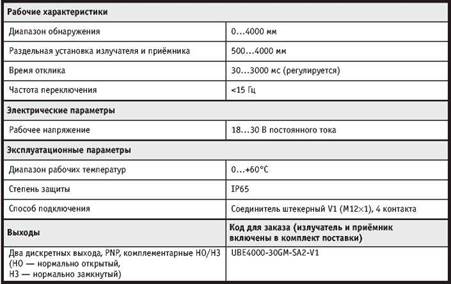 |
Таблица 4. Основные технические данные ультразвуковых датчиков с двумя дискретными выходами в корпусе типа VariKont
 |
Основные технические данные барьерных ультразвуковых датчиков фирмы Pepperl+Fuchs представлены в таблицах 2, 3, 4, 5, 6.
Например, датчик UBE4000-30GM-SA2-V1 способен функционировать в запылённой атмосфере, надёжно определять наличие тонких прозрачных плёнок и хлопьевидных материалов (стиропор, целлюлоза, мелкозернистые синтетические материалы). Чувствительность датчика регулируется встроенным потенциометром, юстировка контролируется по встроенным светодиодным индикаторам. Для дистанционной регулировки диапазона чувствительности возможно подключение внешнего потенциометра FP100 к излучателю.
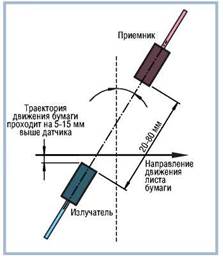
Интересным примерами использования метода ослабления ультразвуковых волн является решение на его основе задач выявления сдвоенных листов бумаги, контроля за положением наклеек и мест стыка. Серия устройств UDB-18GM (табл. 7) специально разработана для подобных применений (рис. 16), которые востребованы в различном оборудовании, например:
• в печатных станках выявление сдавленных листов защищает сложную механику от повреждений, вызванных застреванием второго листа в станке;
• в аппаратах, подсчитывающих этикетки, для проверки факта нанесения клейких плёнок на материал и подсчёта готовых этикеток;
• в оборудовании обработки корреспонденции для проверки полной разгрузки открытых конвертов;
• в аппаратах, подсчитывающих квитанции, контрольные талоны, банковские расписки и т. п.;
• в упаковочных машинах для контроля положения стыка при закреплении алюминиевой упаковочной плёнки, а также для определения скорости хода станка;
• в системах сортировки бумаги и т.д.
Ультразвуковые системы на базе
UDB-18GM способны обнаруживать металлизированные, глянцевые, прозрачные поверхности и могут применяться в тех случаях, когда ёмкостные и оптические системы достигают пределов своих возможностей. Простая настройка на различные материалы и толщины (TEACH-IN), а также автоматическое регулирование порога переключения при изменении условий окружающей среды упрощают подготовку UDB-18GM к эксплуатации и расширяют круг возможных применений.
В ближайших номерах журнала «СТА» планируется, опираясь на описанные в данной статье физические принципы работы и реализуемые методы, продолжить рассказ об ультразвуковых датчиках для систем управления технологическими процессами. •
 |
Таблица 6. Основные технические данные ультразвуковых датчиков серии F64 c диапазоном обнаружения до 1500 мм и одним дискретным выходом
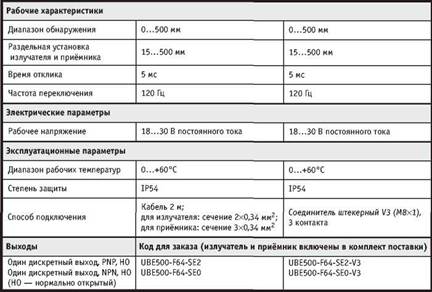 |
Таблица 7. Основные технические данные устройств серии UDB-18GM
 |
 |
 |
Рис. 16. Схема установки излучателя и приёмника системы на базе устройства UDB-18GM35-3E2 при выявлении сдвоенных листов бумаги.
Распространение звука в воздухе
Звуковые колебания в отличие от электромагнитных могут распространяться только в какой-либо упругой среде.
В общем случае скорость распространения звука зависит от изменений плотности упругой среды (ρ) в пространстве и времени,
давления (P) и температуры среды, а также от локальных изменений скорости отдельных частиц упругой среды. Скорость распространения ультразвуковых волн в газовой среде (С) определяется следующим выражением:
C=(k× P/ ρ)1/2 = λ× f,
где P обозначает давление газовой среды;
р — плотность упругой среды;
X и f — соответственно длина волны и частота ультразвуковых колебаний;
к — адиабатический коэффициент для газов.
Для воздуха адиабатический коэффициент равен 1,4, а плотность имеет значение 1,29 кг/м3 при давлении 1013 гПа.
Так как плотность воздуха уменьшается с увеличением температуры, то и скорость распространения звука в воздухе (Св) является зависимым от температуры параметром. Для воздуха эта зависимость может быть представлена в следующем виде:
СВ=с0×(1+ T/273)1/2,
где с0 = 331,6 м/с (скорость распространения звука в воздухе при T = 0°C), а T — текущее значение температуры воздуха, представленное в градусах Цельсия.
Относительное изменение скорости распространения звука, как следует из этой формулы, составляет примерно 0,17% на один градус. В табл. 1 представлена зависимость скорости распространения звука в воздухе от температуры.
Скорость распространения звука в воздушной среде существенно зависит и от давления воздуха: c ростом давления она увеличивается, а максимальное значение относительного изменения скорости звука во всём диапазоне колебания атмосферного давления на уровне моря составляет примерно 5%.
На рис. 1 представлена зависимость скорости звука от температуры и давления воздуха.
|
|
| Таблица 1. Зависимость скорости распространения звука в воздухе от температуры |
Кроме того, скорость звука зависит от состава воздуха, например от процентного содержания CO2 в воздухе, и относительной влажности.
Влияние относительной влажности является меньшим, чем влияние температуры или давления, и вносит максимальное дополнительное изменение скорости звука (сравниваются скорости в сухом и влажном насыщенном воздухе) около 2% [1].
|
|
|

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

