Введение
Электрический привод (ЭП) представляет собой электромеханическую систему, обеспечивающую реализацию различных технологических и производственных процессов в промышленности, сельском хозяйстве, на транспорте, коммунальном хозяйстве и в быту с использованием механической энергии. Назначение ЭП состоит в обеспечении движения исполнительных органов рабочих машин и механизмов и управления этим движением. Другими словами, ЭП, являясь энергетической основой реализации технологических и производственных процессов, во многом определяет их качество, энергетические и технико-экономические показатели.
Научно-технологический прогресс, автоматизация и комплексная механизация технологических и производственных процессов определяют постоянное совершенствование и развитие современного ЭП. В первую очередь это относится ко все более широкому внедрению автоматизированных ЭП с использованием разнообразных полупроводниковых силовых преобразователей и микропроцессорных средств управления. Постоянно появляются и новые типы электрических машин и аппаратов, датчиков координат переменных и других компонентов, применяемых в ЭП.
В современном промышленном и сельскохозяйственном производстве, на транспорте, в строительстве и коммунальном хозяйстве, в быту применяются самые разнообразные технологические процессы, для реализации которых человеком созданы тысячи различных машин и механизмов. С помощью этих рабочих машин и механизмов осуществляется добыча полезных ископаемых, обрабатываются различные материалы и изделия, перемещаются люди, предметы труда, жидкости, газ и реализуются многие другие процессы, необходимые для жизнеобеспечения человека. Так, добыча полезных ископаемых ведется с помощью экскаваторов, буровых установок и угольных комбайнов, детали и материалы обрабатываются на разнообразных станках, люди и изделия перемещаются транспортными средствами, лифтами и эскалаторами, жидкости и газы транспортируются с помощью насосов и вентиляторов.
Рабочая машина или производственный механизм состоят из множества взаимосвязанных деталей и узлов, один из которых непосредственно выполняет заданный технологический процесс или операцию и поэтому называется исполнительным органом (ИО). В лифтах – это кабина, в экскаваторах – ковш, у вентиляторов и насосов – рабочее колесо (крыльчатка). Отметим при этом одно очень важное обстоятельство – все названные технологические процессы осуществляются за счет механического движения ИО рабочих машин и механизмов.
Характерным для многих рабочих машин является наличие не одного, а двух или даже нескольких взаимодействующих ИО. Например, при обработке на токарном станке деталь вращается вокруг своей оси, при этом резец, перемещаясь вдоль детали, снимает с нее слой металла – стружку. В этом случае вращение детали осуществляется шпинделем станка (первый ИО), а поступательно перемещает резец механизм подачи станка (второй ИО).
Во многих технологических процессах требуется управлять движением ИО – регулировать скорость движения и ее направление, точно осуществлять остановку в заданной позиции, ограничивать ускорение движения. Такое регулирование необходимо в лифтах, прокатных станах, транспортерах, многих станках и др.
ИО в процессе выполнения заданной операции должен преодолевать сопротивление своему движению, обусловленное наличием трения или притяжения Земли, упругой и пластической деформациями веществ или другими факторами. Для этого к нему необходимо подвести механическую энергию от устройства, которое в соответствии со своим назначением получило название привода.
Механическая энергия вырабатывается приводом, который преобразовывает другие виды энергии. В зависимости от вида используемой первичной энергии различают гидравлический, пневматический, тепловой и электрический приводы. В современном промышленном производстве, коммунальном хозяйстве и в быту наибольшее применение нашел электрический привод (ЭП), на долю которого приходится более 60% потребляемой в стране электроэнергии.
Такое широкое применение ЭП объясняется целым рядом его преимуществ по сравнению с другими видами приводов: использование электрической энергии, распределение и преобразование которой в другие виды энергии, в том числе и в механическую, наиболее экономично; большой диапазон мощности и скорости движения; разнообразие конструктивного исполнения, что позволяет рационально соединять привод с исполнительным органом рабочей машины и использовать для работы в сложных условиях в воде, среде агрессивных жидкостей и газов, космическом пространстве; простота автоматизации технологических процессов; высокий КПД и экологическая чистота.
Возможности использования современных ЭП продолжают постоянно расширяться за счет достижений в смежных областях науки и техники электромашиностроении и электроаппаратостроении, электронике и вычислительной технике, автоматике и механике.
Электропривод с адаптивным управлением обеспечивает оптимальный ход технологического процесса по заданному показателю качества при изменяющихся возмущениях и условиях работы.
В данной курсовой работе необходимо разработать адаптивную самонастраивающуюся систему автоматизированного электропривода с двухзонным регулированием скорости машины постоянного тока с заданными показателями качества переходного процесса.
Задание
Разработать самонастраивающую систему автоматизированного электропривода с неизменными динамическими характеристиками во всём диапазоне измерения управляющих и возмущающих воздействий.
Исходные данные представлены в виде таблицы 2.1 – Данные
Таблица 2.1 – Данные
| Тип двигателя
| 2ПН-160М
|
| Мощность двигателя Р, кВт
| 18.0
|
| Напряжение якоря Uя , В
| 220
|
| Ток якоря Iя , А
| 92.0
|
| Угловая скорость ω, об|мин
| номинальная
| 3150
|
| максимальная
| 4000
|
| Коэффициент полезного действия η, %
| 87.0
|
| Момент инерции J, кг·м2
| 0.084
|
| Сопротивление якоря Rя, Ом
| 0.037
|
| Сопротивление дополнительных полюсов Rд.п, Ом
| 0.024
|
| Максимальная мощность возбуждения, Вт
| 690
|
3 Техническое задание на СНС АЭП
1. Проектируемый объект – САУ скорости вращения вала двигателя.
2. Объект управления – двигатель постоянного тока независимого возбуждения (ДПТ НВ) 2ПН-160М.
3. Основание для разработки – задание на выполнение курсовой работы по дисциплине "Электропривод в АСУ ТП".
4. Цель проектирования – разработать адаптивную самонастраивающую систему автоматизированного электропривода с неизменными динамическими характеристиками во всём диапазоне изменения управляющих и возмущающих воздействий.
5. Требование к системе:
а) поддержание заданного значения угловой скорости ω при отклонении момента нагрузки (Мн ÷ 2·Мн), момента инерции движущихся частей (Jн ÷ 2·Jн), сопротивлений якоря Rя и возбуждения Rв от их номинальных значений;
б) точность регулирования (0,1 ÷ 0,2)%;
в) диапазон регулирования составляет (1:1000);
г) система должна компенсировать параметрические возмущения, действующие на ОУ.
6. Составить функциональную схему СНС АЭП.
7. Выбрать устройство для регулирования.
8. Разработать схему электрическую принципиальную СНС АЭП.
9. Составить структурную схему СНС АЭП.
10. Произвести анализ и синтез САР СНС АЭП.
11. Построить переходные процессы выходной координаты на скоростях двигателя 0,1; 0,9; 1,1; 1,9 номинального значения.
Предпроектный анализ
Целью предпроектного анализа является определение совокупности факторов, формирующих требования к характеристикам электропривода, его аппаратным средствам и системе автоматического управления и определение возможности реализации электропривода с заданными показателями качества.
Начинается предпроектный анализ, как правило, с анализа техпроцесса или оборудования как объекта управления. В данной курсовой работе объектами управления являются элементы электропривода.
Структурная схема СНС АЭП
Расчет передаточных функций
Элементами схемы являются элементарные динамические звенья и сумматоры. Составляется на основе функциональной схемы и схемы электрической принципиальной. Согласно функциональной схеме определяются блоки, через которые проходит сигнал управления, и по принципиальным схемам этих блоков определяются их передаточные функции.
Передаточные функции двигателя:
– электрическая часть 
– механическая часть 
Расчет статических характеристик
 ,
,
 ,
,
 - сопротивление щетки, Ом;.
- сопротивление щетки, Ом;.
RТП – сопротивление трансформатора, Ом;

RД – динамическое сопротивление тиристора, Ом;
 UТ = 1В – падение напряжения на тиристоре;
UТ = 1В – падение напряжения на тиристоре;
 - электрическая постоянная времени
- электрическая постоянная времени

 - электромеханическая постоянная времени
- электромеханическая постоянная времени

Следовательно, передаточные функции двигателя будут иметь вид
Передаточная функция тиристорного преобразователя
W  (р)=
(р)= 
Передаточная функция датчика тока якоря
W  (р)=
(р)= 
Передаточная функция датчика тока ОВ
 =
= 
Передаточная функция датчика напряжения
К  =
= 
Т  =
= 
W (р)= 
Передаточная функция датчика скорости
WД.С.(р)= 
Передаточная функция согласующего устройства
WСУ(р)=0,8
Передаточная функция датчика ЭДС
W  (р)=
(р)= 
Т =ТЯ=0,0046(с)
К = 
W (р)= 
Передаточная функция эталонной модели двигателя
WЭМ(р)= 
Передаточная функция ОВ
КОВ = 
ТОВ = 0,1 (с)
WОВ= 
Коэффициент передачи между магнитным потоком обмотки возбуждения Ф и током возбуждения IВ
Ф = КОВ·IOB;
l ≈ 0,8 · l30 – длина полюса;
l30 = 645 · 10-3 (м);
l ≈ 0,8 · 645 · 10-3 = 0,516 (м);
S = 0,261 · 0,516 = 0,135 (м2);
Фн = 1,6 · 0,135 = 0,216 (Вб);
КОВ = Фн / IОВ = 0,216/3.136 =0.069;
тогда
Се и См – электромеханическая и электромагнитная постоянная;
 .
.
Заключение
В результате данной курсовой работы была разработана СНС АЭП в условии двух зон регулирования скорости при действии на систему различного рода возмущений. В ходе выполнения работы были разработаны структурная и электрическая принципиальные схемы.
Структурная схема была реализована с помощью пакета Matlab 6.5. Результатами моделирования явились графики переходных процессов, проведен анализ САР, который показал, что система удовлетворяет заданным системам качества:
1) Достигается устойчивость, переходные процессы носят апериодический характер;
2) Характеристики системы стабилизируются при воздействии возмущений;
3) Трубка точности составляет не более 5% текущего значения, при воздействии типовых управляющих воздействий – 0,1; 0,9; 1,1; 1,9 wн двигателя.
Список использованной литературы
1 Электрические машины: Учебник для вузов. – Под ред. Копылова И. П. – М.: Энергоавтоиздат, 1986. – 360 с., ил.
2 Методические указания к курсовой работе по дисциплине «Промышленный электропривод»/Уфимск. авиац. техн. ун-т; Сост. Коуров Г.Н., Зориктуев В.Н. – Уфа, 2002. – 15с.
3 Справочник по автоматизированному электроприводу / Под. ред. В. А. Елисеева и А. В. Шинянского. – М.: Энергоатомиздат, 1983. – 616с. ил.
4 Электрооборудование кузнечно-прессовых машин: Справочник/ В, Е. Стоколов, Г. С. Усышкин, В. М. Степанов и др. – 2-е издание, перераб. и доп. – М.: Машиностроение, 1981. – 304 с., ил.
Введение
Электрический привод (ЭП) представляет собой электромеханическую систему, обеспечивающую реализацию различных технологических и производственных процессов в промышленности, сельском хозяйстве, на транспорте, коммунальном хозяйстве и в быту с использованием механической энергии. Назначение ЭП состоит в обеспечении движения исполнительных органов рабочих машин и механизмов и управления этим движением. Другими словами, ЭП, являясь энергетической основой реализации технологических и производственных процессов, во многом определяет их качество, энергетические и технико-экономические показатели.
Научно-технологический прогресс, автоматизация и комплексная механизация технологических и производственных процессов определяют постоянное совершенствование и развитие современного ЭП. В первую очередь это относится ко все более широкому внедрению автоматизированных ЭП с использованием разнообразных полупроводниковых силовых преобразователей и микропроцессорных средств управления. Постоянно появляются и новые типы электрических машин и аппаратов, датчиков координат переменных и других компонентов, применяемых в ЭП.
В современном промышленном и сельскохозяйственном производстве, на транспорте, в строительстве и коммунальном хозяйстве, в быту применяются самые разнообразные технологические процессы, для реализации которых человеком созданы тысячи различных машин и механизмов. С помощью этих рабочих машин и механизмов осуществляется добыча полезных ископаемых, обрабатываются различные материалы и изделия, перемещаются люди, предметы труда, жидкости, газ и реализуются многие другие процессы, необходимые для жизнеобеспечения человека. Так, добыча полезных ископаемых ведется с помощью экскаваторов, буровых установок и угольных комбайнов, детали и материалы обрабатываются на разнообразных станках, люди и изделия перемещаются транспортными средствами, лифтами и эскалаторами, жидкости и газы транспортируются с помощью насосов и вентиляторов.
Рабочая машина или производственный механизм состоят из множества взаимосвязанных деталей и узлов, один из которых непосредственно выполняет заданный технологический процесс или операцию и поэтому называется исполнительным органом (ИО). В лифтах – это кабина, в экскаваторах – ковш, у вентиляторов и насосов – рабочее колесо (крыльчатка). Отметим при этом одно очень важное обстоятельство – все названные технологические процессы осуществляются за счет механического движения ИО рабочих машин и механизмов.
Характерным для многих рабочих машин является наличие не одного, а двух или даже нескольких взаимодействующих ИО. Например, при обработке на токарном станке деталь вращается вокруг своей оси, при этом резец, перемещаясь вдоль детали, снимает с нее слой металла – стружку. В этом случае вращение детали осуществляется шпинделем станка (первый ИО), а поступательно перемещает резец механизм подачи станка (второй ИО).
Во многих технологических процессах требуется управлять движением ИО – регулировать скорость движения и ее направление, точно осуществлять остановку в заданной позиции, ограничивать ускорение движения. Такое регулирование необходимо в лифтах, прокатных станах, транспортерах, многих станках и др.
ИО в процессе выполнения заданной операции должен преодолевать сопротивление своему движению, обусловленное наличием трения или притяжения Земли, упругой и пластической деформациями веществ или другими факторами. Для этого к нему необходимо подвести механическую энергию от устройства, которое в соответствии со своим назначением получило название привода.
Механическая энергия вырабатывается приводом, который преобразовывает другие виды энергии. В зависимости от вида используемой первичной энергии различают гидравлический, пневматический, тепловой и электрический приводы. В современном промышленном производстве, коммунальном хозяйстве и в быту наибольшее применение нашел электрический привод (ЭП), на долю которого приходится более 60% потребляемой в стране электроэнергии.
Такое широкое применение ЭП объясняется целым рядом его преимуществ по сравнению с другими видами приводов: использование электрической энергии, распределение и преобразование которой в другие виды энергии, в том числе и в механическую, наиболее экономично; большой диапазон мощности и скорости движения; разнообразие конструктивного исполнения, что позволяет рационально соединять привод с исполнительным органом рабочей машины и использовать для работы в сложных условиях в воде, среде агрессивных жидкостей и газов, космическом пространстве; простота автоматизации технологических процессов; высокий КПД и экологическая чистота.
Возможности использования современных ЭП продолжают постоянно расширяться за счет достижений в смежных областях науки и техники электромашиностроении и электроаппаратостроении, электронике и вычислительной технике, автоматике и механике.
Электропривод с адаптивным управлением обеспечивает оптимальный ход технологического процесса по заданному показателю качества при изменяющихся возмущениях и условиях работы.
В данной курсовой работе необходимо разработать адаптивную самонастраивающуюся систему автоматизированного электропривода с двухзонным регулированием скорости машины постоянного тока с заданными показателями качества переходного процесса.
Задание
Разработать самонастраивающую систему автоматизированного электропривода с неизменными динамическими характеристиками во всём диапазоне измерения управляющих и возмущающих воздействий.
Исходные данные представлены в виде таблицы 2.1 – Данные
Таблица 2.1 – Данные
| Тип двигателя
| 2ПН-160М
|
| Мощность двигателя Р, кВт
| 18.0
|
| Напряжение якоря Uя , В
| 220
|
| Ток якоря Iя , А
| 92.0
|
| Угловая скорость ω, об|мин
| номинальная
| 3150
|
| максимальная
| 4000
|
| Коэффициент полезного действия η, %
| 87.0
|
| Момент инерции J, кг·м2
| 0.084
|
| Сопротивление якоря Rя, Ом
| 0.037
|
| Сопротивление дополнительных полюсов Rд.п, Ом
| 0.024
|
| Максимальная мощность возбуждения, Вт
| 690
|
3 Техническое задание на СНС АЭП
1. Проектируемый объект – САУ скорости вращения вала двигателя.
2. Объект управления – двигатель постоянного тока независимого возбуждения (ДПТ НВ) 2ПН-160М.
3. Основание для разработки – задание на выполнение курсовой работы по дисциплине "Электропривод в АСУ ТП".
4. Цель проектирования – разработать адаптивную самонастраивающую систему автоматизированного электропривода с неизменными динамическими характеристиками во всём диапазоне изменения управляющих и возмущающих воздействий.
5. Требование к системе:
а) поддержание заданного значения угловой скорости ω при отклонении момента нагрузки (Мн ÷ 2·Мн), момента инерции движущихся частей (Jн ÷ 2·Jн), сопротивлений якоря Rя и возбуждения Rв от их номинальных значений;
б) точность регулирования (0,1 ÷ 0,2)%;
в) диапазон регулирования составляет (1:1000);
г) система должна компенсировать параметрические возмущения, действующие на ОУ.
6. Составить функциональную схему СНС АЭП.
7. Выбрать устройство для регулирования.
8. Разработать схему электрическую принципиальную СНС АЭП.
9. Составить структурную схему СНС АЭП.
10. Произвести анализ и синтез САР СНС АЭП.
11. Построить переходные процессы выходной координаты на скоростях двигателя 0,1; 0,9; 1,1; 1,9 номинального значения.
Предпроектный анализ
Целью предпроектного анализа является определение совокупности факторов, формирующих требования к характеристикам электропривода, его аппаратным средствам и системе автоматического управления и определение возможности реализации электропривода с заданными показателями качества.
Начинается предпроектный анализ, как правило, с анализа техпроцесса или оборудования как объекта управления. В данной курсовой работе объектами управления являются элементы электропривода.
Электродвигатель как объект управления
Для представления ЭД как ОУ необходимо определить выходные координаты, управляющие воздействием, возмущением и входные параметры. Для этого необходимо рассмотреть математическое описание ЭД:
 - уравнение механической характеристики;
- уравнение механической характеристики;
 - уравнение движения ЭД;
- уравнение движения ЭД;
 - уравнение электрического равновесия для якорной цепи;
- уравнение электрического равновесия для якорной цепи;
 - ЭДС самоиндукции;
- ЭДС самоиндукции;
 - вращающий момент двигателя;
- вращающий момент двигателя;
 - напряжение ОВ;
- напряжение ОВ;
 - уравнение магнитного потока.
- уравнение магнитного потока.
Модель электродвигателя:
Управляющей величиной ДПТ НВ с двухзонным регулированием является Uя и Uв.; управляемая координата - ω; внешним воздействием – силы действующие на вал двигателя, вызванного трением и механическим сопротивлением приводимого в движение механизма.
Таким образом, для модели электродвигателя выходной координатой является ω, входными Uя и Uв, в качестве возмущений принять:
1. ΔM = Mн ÷ Mхх
2. ΔJ = 2·J н ÷ J н
3. ΔRя = 25%Rя
4. Δµ
5. ΔRв.

Рисунок № 4.1 – Модель ОУ
То есть электродвигатель как ОУ является одномерным, т.к. Uя и Uв действуют не одновременно, а поочерёдно.
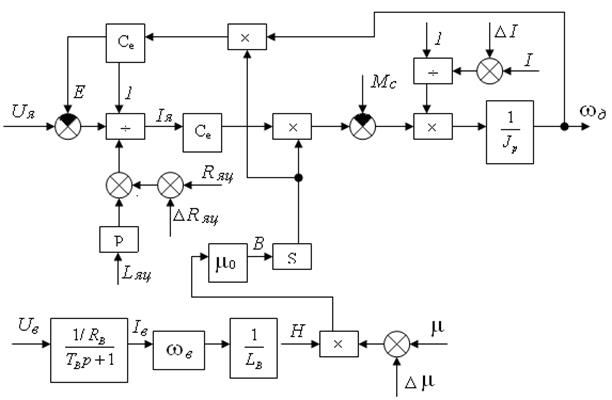
Рисунок № 4.2 - Структурная схема объекта управления
Наличие параметрических возмущений вызывает изменение коэффициента усиления системы (влияние на точность). При стабилизации динамических свойств изменение Kрс уже является возмущением. Один из способов компенсации возмущений, - применение самонастраивающейся системы.






