Введение в кинематику
Кинематика - раздел механики, в котором изучается движение тел без учета их инертности (массы) и действующих на них сил.
Кинематика устанавливает основные понятия и зависимости, необходимые для изучения динамики, а так же методы кинематики имеют и самостоятельное практическое значение, например, при изучении передач движения в механизмах.
Под движением тел в механике понимается изменение с течением времени положения их в пространстве по отношению к другим телам или системам отсчета. За единицу длины принимается - 1м, за единицу времени -1с.
В кинематике простейшего объекта - материальной точки решают две задачи:
1) задание движения, т.е. задание положения точки относительно системы отсчета в любой момент времени;
2) определение по заданному движению (закону) всех кинематических величин, характеризующих данное движение.
2. Способы задания движения точки
Обычно применяют три способа: векторный, координатный, естественный.
2.1. Векторный способ задания движения
Положение точки относительно выбранной системы отсчета задается радиусом - вектором (рис. 5.1), изменяющимся с течением времени:
 . (5.1)
. (5.1)
Уравнение (5.1) определяет закон движения, т.к. позволяет в любой момент времени найти положение движущейся точки по величине и направлению радиуса - вектора  .
.
2.2. Координатный способ задания движения
Аналитически положение точки М (рис. 5.1) можно задавать проекциями радиуса - вектора на координатные оси X, Y и Z. Обозначая для краткости проекции  , где X, Y, Z - координаты движущейся точки, получим
, где X, Y, Z - координаты движущейся точки, получим
 . (5.2)
. (5.2)
Уравнения (5.2) выражают закон движения точки в координатной форме, т.к. в любой момент времени позволяют определить координаты и найти положение точки.
Если точка движется в одной плоскости, то, приняв эту плоскость за плоскость OXY, получим в этом случае два уравнения
 . (5.2')
. (5.2')
Уравнения (5.2) и (5.2') представляют собой и уравнения траектории точки в параметрической форме. Исключив из уравнений движения параметр t, можно найти уравнение в обычной форме, т.е. в виде зависимости между ее координатами.
2.3. Естественный способ задания движения
Применяется, когда траектория АВ движущейся точки известна. Положение точки М от начала отсчета точки O определяется зависимостью (рис. 5.2)
 , (5.3)
, (5.3)
где S - криволинейная координата.

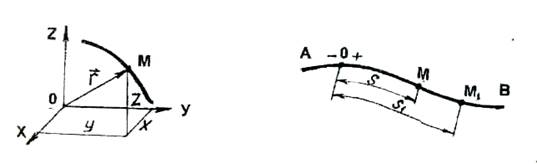
Рис. 5.1 Рис. 5.2
Перемещение точки М в одну сторону считается положительным, в другую - отрицательным.
3. Определение скорости и ускорения при векторном способе задания движения точки
Скорость точки одна из основных характеристик движения. Пусть положение точки М в момент времени t определяется радиусом - вектором , а в момент  - радиусом - вектором
- радиусом - вектором  , (рис. 5.3). Тогда за промежуток времени
, (рис. 5.3). Тогда за промежуток времени  перемещение точки будет определяться вектором
перемещение точки будет определяться вектором  .
.
Вектор средней скорости равен отношению вектора перемещения к промежутку времени, за который это перемещение произошло:
 .
.

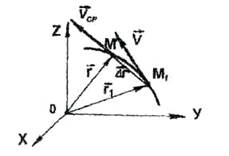
Рис. 5.3
Направление векторов  и
и  совпадают.
совпадают.
Скоростью точки в данный момент времени называется векторная величина  , к которой стремится при стремлении
, к которой стремится при стремлении  к нулю:
к нулю:
 .
.
Этот предел представляет собой первую производную от вектора по времени t, т.е.
 . (5.4)
. (5.4)
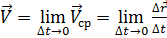
Проекция ускорения на касательную ось (касательное ускорение) равна первой производной от скорости или второй производной от криволинейной координаты по времени. Проекция ускорения на главную нормаль (нормальное ускорение) равно квадрату скорости, деленному на радиус кривизны траектории.
На рис. 5.6 изображены векторы  и
и  . Вектор по величине из уравнения (5.14) всегда положителен и направлен по главной нормали в сторону вогнутости кривой.
. Вектор по величине из уравнения (5.14) всегда положителен и направлен по главной нормали в сторону вогнутости кривой.






Рис. 5.5 Рис. 5.6
Вектор может быть и положительным и отрицательным в зависимости от знака проекции (уравнение 5.13). Из рис. 5.6 видно, что  , т.е. полное ускорение точки определяется диагональю параллелограмма, стороны которого
, т.е. полное ускорение точки определяется диагональю параллелограмма, стороны которого  .
.
По величине ускорение точки
 . (5.15)
. (5.15)
Направление вектора к нормали определяется углом µ.:
 . (5.16)
. (5.16)
Домашнее задание:
1. Прочитайте конспект
2. Запишите способы задания движения точки
3. Определение скорости и ускорения при разных способах задания движения точки
Введение в кинематику
Кинематика - раздел механики, в котором изучается движение тел без учета их инертности (массы) и действующих на них сил.
Кинематика устанавливает основные понятия и зависимости, необходимые для изучения динамики, а так же методы кинематики имеют и самостоятельное практическое значение, например, при изучении передач движения в механизмах.
Под движением тел в механике понимается изменение с течением времени положения их в пространстве по отношению к другим телам или системам отсчета. За единицу длины принимается - 1м, за единицу времени -1с.
В кинематике простейшего объекта - материальной точки решают две задачи:
1) задание движения, т.е. задание положения точки относительно системы отсчета в любой момент времени;
2) определение по заданному движению (закону) всех кинематических величин, характеризующих данное движение.
2. Способы задания движения точки
Обычно применяют три способа: векторный, координатный, естественный.
2.1. Векторный способ задания движения
Положение точки относительно выбранной системы отсчета задается радиусом - вектором (рис. 5.1), изменяющимся с течением времени:
. (5.1)
Уравнение (5.1) определяет закон движения, т.к. позволяет в любой момент времени найти положение движущейся точки по величине и направлению радиуса - вектора .
2.2. Координатный способ задания движения
Аналитически положение точки М (рис. 5.1) можно задавать проекциями радиуса - вектора на координатные оси X, Y и Z. Обозначая для краткости проекции , где X, Y, Z - координаты движущейся точки, получим
. (5.2)
Уравнения (5.2) выражают закон движения точки в координатной форме, т.к. в любой момент времени позволяют определить координаты и найти положение точки.
Если точка движется в одной плоскости, то, приняв эту плоскость за плоскость OXY, получим в этом случае два уравнения
. (5.2')
Уравнения (5.2) и (5.2') представляют собой и уравнения траектории точки в параметрической форме. Исключив из уравнений движения параметр t, можно найти уравнение в обычной форме, т.е. в виде зависимости между ее координатами.
2.3. Естественный способ задания движения
Применяется, когда траектория АВ движущейся точки известна. Положение точки М от начала отсчета точки O определяется зависимостью (рис. 5.2)
, (5.3)
где S - криволинейная координата.
Рис. 5.1 Рис. 5.2
Перемещение точки М в одну сторону считается положительным, в другую - отрицательным.
3. Определение скорости и ускорения при векторном способе задания движения точки
Скорость точки одна из основных характеристик движения. Пусть положение точки М в момент времени t определяется радиусом - вектором , а в момент - радиусом - вектором , (рис. 5.3). Тогда за промежуток времени перемещение точки будет определяться вектором .
Вектор средней скорости равен отношению вектора перемещения к промежутку времени, за который это перемещение произошло:
.
Рис. 5.3
Направление векторов и совпадают.
Скоростью точки в данный момент времени называется векторная величина , к которой стремится при стремлении к нулю:
.
Этот предел представляет собой первую производную от вектора по времени t, т.е.
. (5.4)
Вектор скорости точки в данный момент времени равен первой производной от радиуса - вектора точки по времени.
Направлен вектор скорости по касательной к траектории, т.к. пределом секущей  является касательная. Размерность скорости в системе СИ, м/с.
является касательная. Размерность скорости в системе СИ, м/с.
Ускорение точки характеризует изменение скорости с течением времени. Пусть - скорость в момент времени t, a  - скорость точки в момент времени . Тогда за промежуток времени скорость изменяется на
- скорость точки в момент времени . Тогда за промежуток времени скорость изменяется на  (рис.5.4).
(рис.5.4).
Вектор среднего ускорения равен:
 .
.
Направлен вектор  по направлению
по направлению  , т.е. всегда в сторону вогнутости траектории (рис. 5.4)
, т.е. всегда в сторону вогнутости траектории (рис. 5.4)
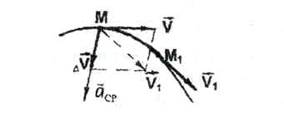
Рис. 5.4
Ускорением точки в данный момент времени называется векторная величина  , к которой стремится в пределе среднее ускорение при стремлении к нулю:
, к которой стремится в пределе среднее ускорение при стремлении к нулю:
 ,
,
С учетом уравнения (5.4)
 . (5.5)
. (5.5)






