

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Наблюдение при УВД
Аббревиатуры:
ПОРЛ- система первичного обзорного радиолокатора
ВОРЛ- вторичный обзорный радиолокатор
АЗН-В- автоматическое зависимое наблюдение
БНС- бортовые навигационные системы
БНК- бортовые навигационные комплексы
ИКВ -измерители курсовертикали
ДИСС-доплеровские измерители скорости и угла сноса
СВС- системы воздушных сигналов
КСА -комплекс средств автоматизации
Определения:
1. Первичная обработка – получение оценок координат подвижного объекта по данным измерителей (например, РЛС).
2. Вторичная обработка – процесс вычисления параметров движения объекта (цели) и построение траектории по данным измерений.
3. Третичная (мультисенсорная) обработка – совместная (комплексная) обработка информации о подвижном объекте наблюдения по данным нескольких измерителей.
4. Автосопровождение – процесс слежения за движением наблюдаемого объекта по дискретным во времени измерениям.
5. Строб – специально построенная ограниченная пространственная область, в которой, по предположению наблюдателя, должен находиться объект (цель) при поступлении очередного измерения.
6. Индентификация – отождествление, или соотнесение, измерительной информации с определенным объектом наблюдения.
Схемы и определения:
Система наблюдения ОВД_общий термин, под которым в отдельности понимаются системы первичного обзорного радиолокатора (ПОРЛ), вторичного обзорного радиолокатора (ВОРЛ), радиовещательного автоматического зависимого наблюдения (АЗН-В) или любая другая сопоставимая наземная система, позволяющие опознать воздушное судно.
Архитектура типовой схемы наблюдения нового поколения:
|
|

Рис. 5.1. Типовая схема размещения и соединения оборудования, применяемого в системе «Альфа»
Оборудование и матобеспечение адаптируется к требованиям заказчика и условиям конкретного аэропорта. Такая архитектура допускает работу в режиме сокращенного состава технических средств, что обеспечивает полную эксплуатационную готовность системы при отказах.
К нестандартному оборудованию относятся:
· устройство преобразования радиолокационной информации;
· устройство сопряжения с пеленгатором;
· платы сопряжения с сетью АФТН;
· часть интерфейсного оборудования.
В состав группового оборудования входят:
· модуль централизованной обработки (только для сетевого варианта) – сервер системы;
· коммуникационное оборудование;
· модуль распределения исходных сигналов РЛС (только для локального варианта).
В состав индивидуального оборудования входят:
· модуль отображения ДВО – рабочая станция диспетчера;
· модуль сопряжения с автоматическим радиопеленгатором.
Схема наблюдения:
Под фильтрацией обычно понимают отделение полезной информации (сигнала) от помех.
Оценка координаты или параметра движения – величина, находящаяся в некотором соответствии с истинным значением координаты (параметра), близкая к нему в том или ином смысле.
Построение оценок траекторий называют сглаживанием.
Оценивание – процесс получения оценки в условиях неопределенности, вызванной действием случайных факторов (помех и ошибок измерений). Терминологически оценивание носит более общий характер, нежели фильтрация, которую следует рассматривать как частный его вид
 Рис. 5.2. Схема наблюдения за одиночным движущимся объектом.
Рис. 5.2. Схема наблюдения за одиночным движущимся объектом.
В качестве основного объекта наблюдения (ОН) в дальнейшем будет выступать воздушное судно (ВС).
Источниками информации являются следующие измерительные системы: радиолокаторы – первичные (ПРЛ) и вторичные (ВРЛ), бортовые навигационные системы (БНС) и бортовые навигационные комплексы (БНК), включающие радиотехнические, инерциальные, спутниковые и др. Сюда же для сокращения записи отнесены такие измерители, как инерциальные, курсовертикали (ИКВ), доплеровские измерители скорости и угла сноса (ДИСС), системы воздушных сигналов (СВС), и прочее оборудование, входящее в пилотажно-навигационный вычислительный комплекс современных самолетов гражданской авиации.
|
|
Функции системы наблюдения (наблюдателя, СН) возлагаются на наземный комплекс средств автоматизации (КСА) наблюдения и отображения или АС УВД.
Формализация процесса наблюдения:
Объект наблюдения. В качестве математической модели ОН примем систему обыкновенных дифференциальных уравнений (в общем случае – нелинейных и неавтономных) вида:
x'= f(x,u,v,t),
где x – вектор параметров состояния (фазовых координат); u – вектор управляющих воздействий; v – вектор возмущающих воздействий; t – время; f(•) – нелинейная вектор-функция.
Измерительная система. Выходом системы являются измерения:
g(x,δ(t))=χ,
где χ – вектор измерений; δ(t) – погрешности измерений; g(×) – вектор функция.×
Система наблюдения. Задача СН – выработать оценку состояния наблюдаемого объекта по результатам измерений. В математической теории управления-наблюдения задача наблюдения формулируется как отыскание такой операции (правила и алгоритма),
(χ(τ),t- θ £ τ £ t)
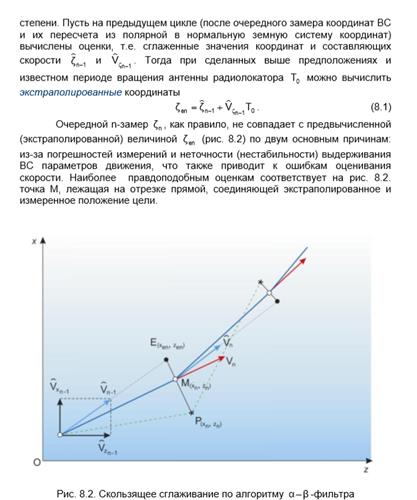
Сглаживание и экстраполяция
Оценивание координат и параметров движения по результатам радиолокационного наблюдения в традиционных АС УВД осуществляется α–β-фильтром, получившим свое название по двум параметрам сглаживания. Для коэффициентов сглаживания будем в дальнейшем применять буквы α и β
Под обозначением ζ будем в дальнейшем понимать любую из координат x и z.
Предполагается, что ВС, от которого получена РЛ-отметка, летит с постоянными путевой скоростью и путевым углом. Поэтому для каждой из двух координат x и z принята описывающая функция в виде полинома первой …
 .
.
Мультирадарная обработка
Мультирадарная обработка должна обеспечить стабильное сопровождение воздушных целей и формирование картины воздушной обстановки путем анализа информации, поступающей от нескольких источников (радаров). Как правило, радары обладают разными характеристиками, так что в конкретных условиях может быть более эффективен тот или иной радар.
|
|

На рисунке представлена мозаичная обработка информации:
Очевидным недостатком «мозаичного» метода является отказ от совместной обработки координат взонах перекрытия, так что этот резерв улучшения характеристик сопровождения остается незадействованным. Заметим также, что проблема идентификации («сшивки») траекторий при переходе ВС из одного домена в другой остается довольно сложной из-за различия точностных характеристик радиолокаторов.
Системы АЗН
Аббревиатуры:
СРНС – спутниковые радионавигационные системы;
GNSS – global navigation satellite system (спутниковая система навигации);
FANS – future air navigation system (комитет по будущим навигационным системам);
CNS/ATM – Communication, Navigation, Surveillance/Air traffic Management (связь, навигация, наблюдение/ОрВД);
АЗН – автоматическое зависимое наблюдение (-К – контрактное, -В – широковещательное);
ЛПД – линия передачи данных (VDL – УКВ ЛПД);
CPDLC – controller-pilot data link communication;
БС – базовая станция.
Идеи и определения:
СРНС
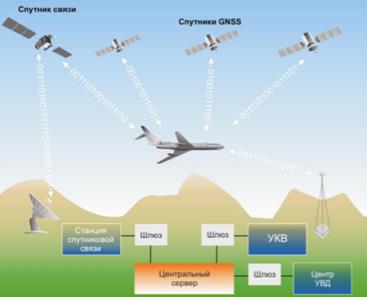
В прошлом диспетчеру, имеющему в своем распоряжении современный локатор, положение ВС было известно точнее, чем его экипажу. Ситуация изменилась с вводом в эксплуатацию СРНС второго поколения, таких как NAVSTAR и ГЛОНАСС. При установке на ВС навигационного приемника такой системы у экипажа появляется возможность определять собственное местоположение с точностью 30 м каждую секунду, а при наличии вблизи ВС станции дифференциальных поправок точность может быть повышена. Кроме того, при интеграции (комплексировании) GNSS-приемника с бортовым навигационным комплексом появляется возможность повышения надежности местоопределения за счет сопряжения его с инерциальной системой навигации. Таким образом, с появлением СРНС положение ВС стало лучше определяться его бортовым навигационным комплексом, чем наземными средствами наблюдения, которыми располагает диспетчер. В связи с этим появилась идея передавать данные о местоположении с борта ВС на землю, снабдив тем самым авиадиспетчера высокоточной и оперативной информацией о воздушной обстановке. Такая трансляция возможна только по линиям цифровой радиосвязи (VDL).
|
|
АЗН
АЗН –метод наблюдения, при котором ВС автоматически по цифровой ЛПД предоставляет пользователям информацию своих бортовых систем.
Существуют системы АЗН двух основных типов:
· АЗН-К контрактного типа – автоматическая передача данных с борта ВС начинается после того, как орган УВД или другое ВС подписались (или заключили контракт) на получение этих данных. При этом посылки являются адресными, т.е. доступными только пользователю или группе пользователей, подписавшихся на их получение. Содержимое и частота посылок определяются контрактом;
· АЗН-В широковещательного типа – ВС осуществляет периодическую (до 1 сообщения в секунду) рассылку своих данных по ЛПД широковещательного типа (без установления контракта). При этом рассылаемые данные доступны для всех заинтересованных пользователей.
АЗН-К и FANS
Изначально система FANS создавалась для обеспечения авиакомпаний оперативной связью с принадлежащими им ВС, т.е. не для УВД. Основным элементом системы FANS является глобальная компьютерная сеть, предназначенная для сбора информации о ВС, рассылки этой информации по потребителям и трансляции сообщений с борта ВС на землю и обратно. Прямая связь потребителя через базовую станцию УКВ ЛПД с ВС в системе FANS не предусмотрена. Все контракты на получение информации и обмен сообщениями осуществляются в этой системе через посредников, каковыми являются серверы компьютерной сети FANS (при использовании в УВД – шлюзы компьютерной сети FANS).
Схема оснащения центра УВД системой FANS:
Программа отображения воздушной обстановки на рабочем месте диспетчера сопрягается со шлюзом и обеспечивает автоматизацию управления контрактами путем их автоматической установки или отмены.
CPDLC
CPDLC – услуга безголосовой связи пилот-диспетчер. Функция – предоставление диспетчеру средств создания, передачи и приема стандартных формализованных сообщений. Диспетчер имеет возможность просмотреть предысторию сообщений по сопровождаемым ВС, создать новое сообщение, используя стандартные формы («Набрать высоту», «Сбросить высоту», «Изменить маршрут» и др.), контролировать ответы ВС, а также устанавливать и отменять контракты на автоматическое получение той или иной информации.
АЗН-В
Особенностью АЗН-В является способность работать без сложной наземной инфраструктуры.

Транспондер АЗН-В – устройство, содержащее GNSS-приемник, цифровой УКВ приемопередатчик (радиомодем) и контроллер, связывающий эти устройства. Все приемопередатчики настроены на одну частоту. Каждый из них, прослушивая этот канал, получает координатную информацию о других ВС, находящихся в зоне радиовидимости, а также транслирует в него информацию о себе. В итоге выполняется принцип «все видят всех».
|
|

Вывод:
Использование широких возможностей, предоставляемых системами АЗН в рамках стратегии CNS/ATM, сопровождается изменением ролей и ответственности как пользователей ВП, так и органов, обеспечивающих его использование. При широком внедрении АЗН следует ожидать и существенных изменений технологии УВД.
Информация интерфейса
Основные требования к интерфейсу «диспетчер–система» заключаются в предоставлении информации, необходимой для решения текущей задачи:
1. Картографическая информация;
2. Информация о воздушной;
3. Плановая информация;
4. Информация об ограничениях в использовании воздушного пространства;
5. Информация о метеорологической обстановке;
6. Технологическая информация.
Автоматизация центров УВД
Аббревиатуры:
ЦУП – центры управления полетами;
АРП - автоматические радиопеленгаторы;
РТОП – радиотехническое обеспечение полетов;
СКРС - система коммутации речевой связи;
АРАС УВД - автоматизированная районно-аэродромная система управления воздушным движением.
Определения:
Авиационная фиксированная электросвязь – это связь, используемая для передачи в ЦУП радиолокационной информации и данных о состоянии и режимах работы РТОП, а также для посылки команд управления на радиолокационные позиции и прямой речевой связи.
Безопасность данных – это такое состояние хранимых, обрабатываемых и передаваемых данных, при котором невозможно их случайное или преднамеренное получение, изменение или уничтожение.
Защита данных – совокупность целенаправленных действий и мероприятий по обеспечению безопасности данных.
Доступ – процесс использования технических и программных средств, обеспечивающий логическую (физическую) связь с каким-либо ресурсом для его функционального использования или получения (модификации) поддерживаемых этим ресурсом данных.
Основной идеей укрупнения центров УВД и создание объединенных ЦУП является:
· достижение мирового уровня безопасности ВД в соответствии с
рекомендациями ИКАО и концепцией CNS/ATM;
· обеспечение гибкости системы ОВД, позволяющей ей развиваться
и адаптироваться к изменяющимся условиям и потребностям пользователей
ВП;
· повышение технико-экономической эффективности системы ОВД
за счет снижения эксплуатационных расходов при повышении уровня
безопасности УВД.
Основная идея развития вычислительной техники была и остается идея максимальной доступности ее для пользователей, что входит в противоречие с требованием обеспечения безопасности данных. Поэтому практически наибольшие усилия по обеспечению безопасности данных предпринимались при разработке операционных систем (ОС).
Формулы, как пример (т.к. в данном вопросе нет формул, то берем с других разделов):
1.  dt – ППФ (прямое преобразование Фурье)
dt – ППФ (прямое преобразование Фурье)
2.  d𝜔 – ОПФ (обратное преобразование Фурье)
d𝜔 – ОПФ (обратное преобразование Фурье)



Идеи:
1)Комплексы средств передачи данных
Они предназначены для сбора, преобразования и передачи данных от радиолокационных станций, радиопеленгаторов и приемопередающих центров по каналам (линиям) связи в центры УВД, а также для обмена данными между самими центрами УВД
2) стандарт ASTERIX
Первоначально этот стандарт был предназначен для обеспечения стандартизованного обмена информацией между радиолокаторами и системами УВД, при этом одной из основных целей являлось обеспечение взаимодействия оборудования, произведенного разными разработчиками.
3) Интерфейсные устройства
предназначены для контроля текущего состояния станции, а также для управления ее работой.
Речевая связь в АС УВД
Для осуществления управления воздушным движением диспетчеру необходимо поддерживать связь с экипажами воздушных судов и другими участниками движения, а также со смежными диспетчерскими пунктами.
С этой целью в состав средств УВД включается система речевой связи (СРС).
СРС обеспечивает:
- связь с экипажами воздушных судов;
- связь с наземными подвижными объектами;
- внутрицентровую оперативную связь с диспетчерскими пунктами и
- техническим персоналом;
- оперативную телефонную связь с удаленными диспетчерскими
пунктами;
- внешнюю оперативную связь со смежными диспетчерскими
пунктами;
- неоперативную связь с прочими абонентами.
Речевая связь подразделяется на радиосвязь (с подвижными наземными и воздушными объектами с неподвижными наземными объектами, между которыми по каким-либо обстоятельствам нет проводных линий) и телефонную связь (с неподвижными наземными объектами).
Для организации речевой связи требуется:
- [ ] ввести и вывести речевую информацию (т. е. иметь «куда говорить» и «откуда слушать» – назовем соответствующие устройства разговорными приборами)
- [ ] во-вторых, инициировать установление соединения и указать абонента, с которым требуется установить связь
- [ ] в-третьих, передать заданному абоненту и получить от него речевую информацию.
«Каждый с каждым» в этом случае каждый из n абонентов соединён с каждым
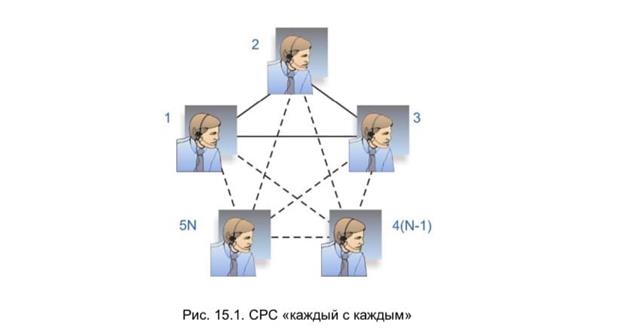
Коммутация -организация доставки речевой связи от одного абонента к другому в отсутствии линий связи, непосредственно их соединяющей.
При канальной коммутации все абоненты соединены линией связи с центральным устройством (это упрощает схему взаимодействия в отличии от типа «каждый с каждым», потому что намного проще добавлять нового участника, так как он соединяется непосредственно с центральным коммутатором, к не с каждым абонентом по отдельности).

Состав подсистемы:
- разговорные приборы;
- устройство ввода команд и индикации состояния системы;
- управляющий блок.
В настоящее время применяются следующие виды разговорных приборов:
- настольный микрофон в сочетании с одним или несколькими громкоговорителями;
- микротелефонная трубка;
- головная гарнитура.
14. Комплекс средств автоматизации планирования ВД
Аббревиатуры:
КСА ПВД - комплекс средств автоматизации планирования воздушного движения.
АФТН – aeronautical fixed telecommunication network - сеть авиационной фиксированной электросвязи.
ЛВС – локальная вычислительная сеть.
АРМ – автоматизированное рабочее место.
ЦКС – центр коммутации сообщений.
Определения:
Основные данные – таблицы аэропортов, авиакомпаний, типов ВС, точек и участков воздушных трасс. Эти данные используются программами комплекса при обработке поступающей плановой информации и при передаче информации потребителям.
Оперативные данные. Их источниками являются центральное расписание, телеграммы и текущие планы полетов.
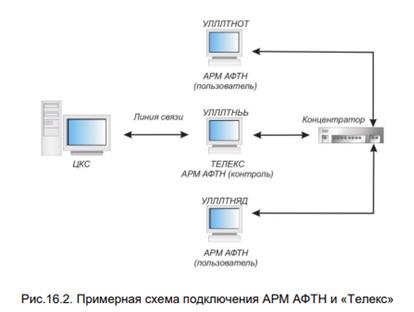
«Телекс» - программа взаимодействия с ЦКС. «Телекс» выполняет прием, передачу телеграмм и обмен служебными телеграммами с ЦКС.
Подсистема обработки плановой информации в АС УВД нового поколения представляет собой сложный вычислительный комплекс, который обладает большой универсальностью и может использоваться вне АС.
КСА ПВД “Планета”
Идеи:
1) КСА ПВД “Планета” выполняет функции по сбору и преобразованию данных о плановой информации, осуществляет обработку сообщений сети АФТН и распределение планов полетов. Обработка планов полетов включает представление каждого полученного сообщения в стандартном формате, выдачу диспетчеру сообщений о выявленных ошибках, идентификацию каждого сообщения в соответствии с классификацией, принятой в гражданской авиации, последующий автоматический или ручной ввод в базу данных, корректировку планов полетов по информации, полученной от нескольких источников.
2) В зависимости от конфигурации зон УВД и требований заказчика КСА ПВД “Планета” может включать от одного до двух серверов планирования и
неограниченное количество рабочих станций, на которых могут выполняться
задачи планирования, штурманского обеспечения, задачи ПДСП и экономики.
3) Основу системы составляют электронные таблицы (основные данные, оперативные данные, центральное расписание, телеграммы, заявки, текущий план полетов, техническая годность).
Рисунки:


Формулы: (В этом разделе нет)
Обобщенный ряд Фурье: 
Критерий Неймана – Пирсона: 
Аббревиатуры:
SCАDA (Supervisory Control And Data Acquisition – диспетчерское управление и сбор данных);
АРМ – автоматизированное рабочее место;
СИП – справочно-информационная подсистема;
ЛАЗ – линейно-аппаратный зал;
ЛВС – локально-вычислительная сеть.
SCADA
SCA DА – это специализированное программное обеспечение, ориентированное на поддержку интерфейса между диспетчером и системой управления, а также на коммуникацию с внешним миром.
Многие проекты автоматизированных систем контроля и управления, основанные на SCADA технологиях, имеют общую схему реализации. Как правило, это двухуровневые системы.
Нижний уровень – это уровень объекта (контроллерный). Он включает различные датчики для сбора информации о ходе технологического процесса, электроприводы и исполнительные механизмы для реализации регулирующих и управляющих воздействий.
Верхний уровень – диспетчерский пункт (ДП) – включает прежде всего одну или несколько станций управления, представляющих собой автоматизированное рабочее место (АРМ) диспетчера/оператора.
Основные задачи СИП:
· ввод, хранение и корректировка справочной информации;
· предоставление справочной информации на рабочих местах (АРМах);
· сопряжение с другими системами и комплексами по оговоренным протоколам взаимодействия для обмена информацией.
Структурная схема СИП:

СИП состоит из двух основных частей: серверная часть и рабочие места.
1. Серверы СИП предназначены для ввода, хранения и выдачи на рабочие места справочной информации.
2. Рабочие места СИП предназначены для отображения информации, размещенной в информационной базе.
Основные разделы информационной базы:
· Раздел «УВД»;
· Раздел «Навигация»;
· Раздел «Справочники»;
· Раздел «Внутренние документы»;
· Раздел «РТС»;
· Раздел «Руководство пользователя»;
· Раздел «Метеоинформация»;
· Раздел «Режимы и ограничения»;
· Раздел «Доска объявлений».
Аббревиатуры:
ЛП – летное происшествие.
МСРП (черный ящик) - магнитная система регистрации режимов полета.
ИКМ - Импульсно-кодовая модуляция
ISDN - Integrated Services Digital Network (цифровая сеть с интеграцией служб)
Понятия:
Под документированием информации понимают ее запись и сохранение в течение некоторого интервала времени, дающие возможность ее последующего воспроизведения в первоначальном виде, а также необходимой обработки.
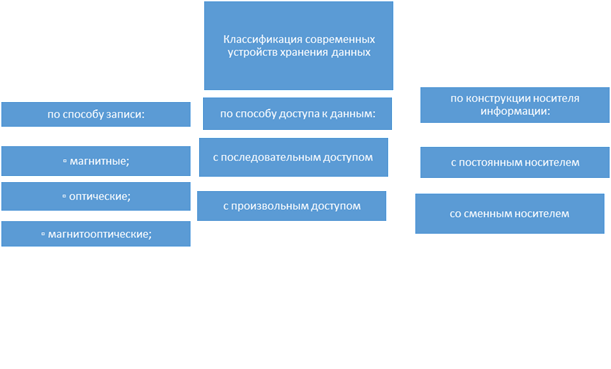
Жесткий диск - запоминающее устройство (устройство хранения информации, накопитель) произвольного доступа, основанное на принципе магнитной записи. Жесткие диски имеют большой объем (достаточный для хранения записи за несколько суток), очень малое время доступа к информации и высокую надежность.
Стример (накопитель на магнитной лент е) - запоминающее устройство на принципе магнитной записи на ленточном носителе, с последовательным доступом к данным. (в лекциях – стриммер, как писать, решайте сами). Широко применяются в цифровых магнитофонах. Эти устройства имеют объем, достаточный для хранения одних–двух суток записи. Сменный носитель обеспечивает удобную процедуру опечатывания. Компактность и невысокая цена позволяют использовать в одном центре УВД большое количество носителей увеличить срок хранения записей.
Гальваническая развязка - передача энергии или информационного сигнала между электрическими цепями, не имеющими непосредственного электрического контакта между ними.
Схемы:

Идеи:
Основной идеей документирования (регистрация информации с привязкой ко времени) является организации объективного контроля. Документированную информацию можно многократно воспроизводить и обрабатывать, что позволяюет производить подробный анализ процесса УВД. Это особенно важно при расследовании летных происшествий (ЛП), когда необходимы объективные данные о том, как развивалась ситуация, какие команды отдавались диспетчером, как на них реагировал и что докладывал экипаж воздушного судна, и т.д. Кроме расследования инцидентов и происшествий объективный контроль необходим для периодической проверки квалификации диспетчерского состава, ибо запись позволяет оценить действия диспетчера в конкретной ситуации
Идеей опечатывания (ареста) записанной информации является обеспечение сохранности записи от умышленного или непреднамеренного уничтожения (стирания). Процедура опечатывания применяется при возникновении происшествия.
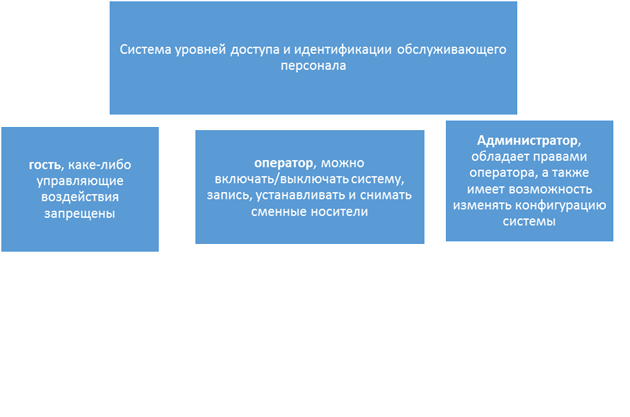
Идея системы уровней доступа и идентификации обслуживающего персонала заключается в обеспечении защиты аппаратуры документирования от несанкционированного доступа, так как задокументированная информация может быть использована при разборе летных происшествий и для оценки профессиональной пригодности персонала.
Принципы автоматизации процессов УВД
С ростом интенсивности и плотности ВД, появлением высокоскоростных ВС большой пассажировместимости загрузка диспетчера возрастает настолько, что существенно повышается вероятность принятия им ошибочного решения или пропуск (несвоевременное обнаружение) опасных ситуаций. Простое увеличение количества диспетчеров не даст желаемого результата, так как увеличиваются объём и интенсивность обмена информацией между ними. Единственный выход заключается в передаче части функций диспетчера вычислительной системе. При этом немедленно возникает вопрос о степени автоматизации.
В зоне управления диспетчера находится, как правило, не одно.а множество ВС. С увеличением их числа, сложность управления, связанная прежде всего с возникновением опасных ситуаций, растёт не по линейному, а экспоненциальному закону.
Сократить число нестандартных ситуаций, для которых не рассчитаны алгоритмы управления можно, если пойти по пути создания адаптивных экспертных систем. Они, однако, предполагают выработку новых алгоритмов (стратегий) в процессе работы (самообучения), что неприемлемо в реальных условиях функционирования системы УВД, т.к. не гарантирует от принятия ошибочных решений.
По мере совершенствования АС УВД перечень функций и операций, которые полностью автоматизированы, расширяется и, следовательно, возрастает уровень автоматизации степень совершенства систем технических средств автоматизации процессов УВД.
Автоматизированные системы (АС) УВД – системы с высоким уровнем автоматизации.
Создание АС УВД нового поколения представляет собой сложную и трудоемкую научно-техническую проблему. Ее решение требует привлечения значительных сил и средств.
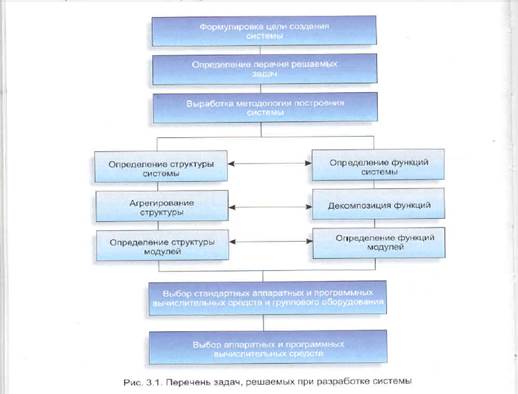
Фундамент информационной технологии будет жизнеспособным, только если данные правильно идентифицировать и структурировать так, чтобы ими можно было пользоваться с достаточной гибкостью. Общую методологию построения информационно-вычислительных систем можно представить в виде нескольких блоков.

Основные характеристики, непосредственно влияющие на уровень безопасности полетов:
· Готовность
· Целостность
· Непрерывность
· Эргономичность
· Надежность
· Открытость
· Эксплуатационные требования
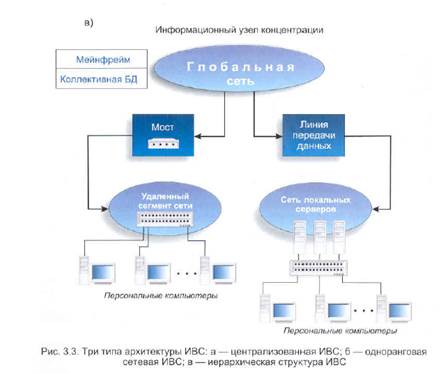
Известны информационно-вычислительные системы с архитектурой четырех типов. Они различаются, прежде всего, по способу организации и конфигурации вычислительных ресурсов, ограничивающих средства централизованной и распределенной обработки.
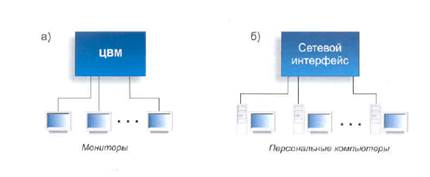
В информационных и вычислительных системах сетевого типа, к которым относятся современные АС УВД, следует учитывать время, затрачиваемое на передачу, информации по сети. Она осуществляется кадрами, которые строятся по определенным правилам – протоколам.
2. Автоматизация обработки плановой информации
Аббревиатуры:
ПП АС УВД – Плановая подсистема автоматизированной системы УВД;
СИТА(Societe Internationale de Telecommunication Aeronautiqes) – международная организация авиационной электросвязи;
СУБД – система управления базами данных.
АФТН(англ. aeronautical fixed telecommunication network, AFTN) — информационная сеть гражданской авиации.
Этапы планирования (преобразовать в определения):

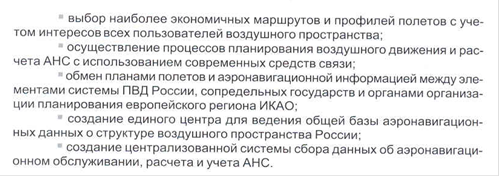
Задачи автоматизации процессов планирования воздушного движения

Информационная структура системы планирования

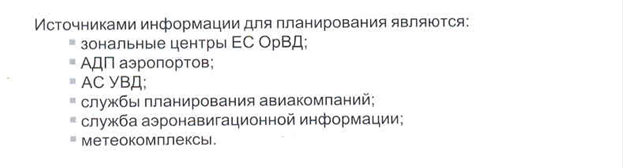
Источники информации для планирования
Техническая реализация системы обработки плановой информации

Наблюдение при УВД
Аббревиатуры:
ПОРЛ- система первичного обзорного радиолокатора
ВОРЛ- вторичный обзорный радиолокатор
АЗН-В- автоматическое зависимое наблюдение
БНС- бортовые навигационные системы
БНК- бортовые навигационные комплексы
ИКВ -измерители курсовертикали
ДИСС-доплеровские измерители скорости и угла сноса
СВС- системы воздушных сигналов
КСА -комплекс средств автоматизации
Определения:
1. Первичная обработка – получение оценок координат подвижного объекта по данным измерителей (например, РЛС).
2. Вторичная обработка – процесс вычисления параметров движения объекта (цели) и построение траектории по данным измерений.
3. Третичная (мультисенсорная) обработка – совместная (комплексная) обработка информации о подвижном объекте наблюдения по данным нескольких измерителей.
4. Автосопровождение – процесс слежения за движением наблюдаемого объекта по дискретным во времени измерениям.
5. Строб – специально построенная ограниченная пространственная область, в которой, по предположению наблюдателя, должен находиться объект (цель) при поступлении очередного измерения.
6. Индентификация – отождествление, или соотнесение, измерительной информации с определенным объектом наблюдения.
Схемы и определения:
Система наблюдения ОВД_общий термин, под которым в отдельности понимаются системы первичного обзорного радиолокатора (ПОРЛ), вторичного обзорного радиолокатора (ВОРЛ), радиовещательного автоматического зависимого наблюдения (АЗН-В) или любая другая сопоставимая наземная система, позволяющие опознать воздушное судно.
Архитектура типовой схемы наблюдения нового поколения:
Рис. 5.1. Типовая схема размещения и соединения оборудования, применяемого в системе «Альфа»
Оборудование и матобеспечение адаптируется к требованиям заказчика и условиям конкретного аэропорта. Такая архитектура допускает работу в режиме сокращенного состава технических средств, что обеспечивает полную эксплуатационную готовность системы при отказах.
К нестандартному оборудованию относятся:
· устройство преобразования радиолокационной информации;
· устройство сопряжения с пеленгатором;
· платы сопряжения с сетью АФТН;
· часть интерфейсного оборудования.
В состав группового оборудования входят:
· модуль централизованной обработки (только для сетевого варианта) – сервер системы;
· коммуникационное оборудование;
· модуль распределения исходных сигналов РЛС (только для локального варианта).
В состав индивидуального оборудования входят:
· модуль отображения ДВО – рабочая станция диспетчера;
· модуль сопряжения с автоматическим радиопеленгатором.
Схема наблюдения:
Под фильтрацией обычно понимают отделение полезной информации (сигнала) от помех.
Оценка координаты или параметра движения – величина, находящаяся в некотором соответствии с истинным значением координаты (параметра), близкая к нему в том или ином смысле.
Построение оценок траекторий называют сглаживанием.
Оценивание – процесс получения оценки в условиях неопределенности, вызванной действием случайных факторов (помех и ошибок измерений). Терминологически оценивание носит более общий характер, нежели фильтрация, которую следует рассматривать как частный его вид
Рис. 5.2. Схема наблюдения за одиночным движущимся объектом.
В качестве основного объекта наблюдения (ОН) в дальнейшем будет выступать воздушное судно (ВС).
Источниками информации являются следующие измерительные системы: радиолокаторы – первичные (ПРЛ) и вторичные (ВРЛ), бортовые навигационные системы (БНС) и бортовые навигационные комплексы (БНК), включающие радиотехнические, инерциальные, спутниковые и др. Сюда же для сокращения записи отнесены такие измерители, как инерциальные, курсовертикали (ИКВ), доплеровские измерители скорости и угла сноса (ДИСС), системы воздушных сигналов (СВС), и прочее оборудование, входящее в пилотажно-навигационный вычислительный комплекс современных самолетов гражданской авиации.
Функции системы наблюдения (наблюдателя, СН) возлагаются на наземный комплекс средств автоматизации (КСА) наблюдения и отображения или АС УВД.
Формализация процесса наблюдения:
Объект наблюдения. В качестве математической модели ОН примем систему обыкновенных дифференциальных уравнений (в общем случае – нелинейных и неавтономных) вида:
x'= f(x,u,v,t),
где x – вектор параметров состояния (фазовых координат); u – вектор управляющих воздействий; v
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!