СОДЕРЖАНИЕ
Принципы работы и расчет настройки двухпозиционных регуляторов........ 2
1-1. Характеристики двухпозиционных регуляторов................................ 2
1-2. Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при отсутствии запаздывания в системе 11
а) Объект без самовыравнивания.............................................................. 11
б) Одноемкостный объект с самовыравниванием..................................... 13
Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при наличии запаздывания в системе.......... 18
а) Объект без самовыравнивания с запаздыванием.................................. 18
б) Одноемкостный объект с самовыравниванием..................................... 21
Упрощенный метод расчета инерционных систем с двухпозиционным регулятором........................................................................................................................... 23
Двухпозиционные автоматические регуляторы и устройства........................ 30
2-1. Электрическое позиционное регулирующее устройство электронных автоматических мостов и потенциометров............................................... 30
Методы и устройства, улучшающие качество двухпозиционного регулирования объектов с запаздыванием................................................................................ 33
3-1. Метод неполного притока и оттока энергии..................................... 33
3-2. Двухпозиционное релейно-импульсное регулирование................... 36
3-3. Электромеханические приставки к двухпозиционным регуляторам 44
3-4. Релейно-контактные корректирующие приставки............................ 48
Глава 1. Принципы работы
и расчет настройки двухпозиционных регуляторов
Двухпозиционные автоматические регуляторы и устройства
Двухпозиционное регулирование может быть осуществлено с помощью различных электромеханических элементов и устройств общего назначения (рис. 1-4, 1-6 и т. п.), которые конструктивно не связаны друг с другом.
Однако для осуществления двухпозиционного регулирования имеются также специальные регулирующие устройства, регулирующие приборы и автоматические регуляторы.
В настоящей главе будут рассмотрены наиболее распространенные двухпозиционные автоматические регуляторы и устройства, серийно выпускающиеся отечественной промышленностью.
Методы и устройства, улучшающие качество двухпозиционного регулирования объектов с запаздыванием
При наличии большого запаздывания в системах при применении двухпозиционных регуляторов установившиеся колебания регулируемой величины могут иметь недопустимые по требованиям технологии значения даже при статической характеристике регулятора без зоны неоднозначности.
Для расширения области применения наиболее простых, дешевых и надежных в работе двухпозиционных регуляторов в настоящее время разработано большое количество различных методов улучшения качества двухпозиционного регулирования.
СОДЕРЖАНИЕ
Принципы работы и расчет настройки двухпозиционных регуляторов........ 2
1-1. Характеристики двухпозиционных регуляторов................................ 2
1-2. Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при отсутствии запаздывания в системе 11
а) Объект без самовыравнивания.............................................................. 11
б) Одноемкостный объект с самовыравниванием..................................... 13
Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при наличии запаздывания в системе.......... 18
а) Объект без самовыравнивания с запаздыванием.................................. 18
б) Одноемкостный объект с самовыравниванием..................................... 21
Упрощенный метод расчета инерционных систем с двухпозиционным регулятором........................................................................................................................... 23
Двухпозиционные автоматические регуляторы и устройства........................ 30
2-1. Электрическое позиционное регулирующее устройство электронных автоматических мостов и потенциометров............................................... 30
Методы и устройства, улучшающие качество двухпозиционного регулирования объектов с запаздыванием................................................................................ 33
3-1. Метод неполного притока и оттока энергии..................................... 33
3-2. Двухпозиционное релейно-импульсное регулирование................... 36
3-3. Электромеханические приставки к двухпозиционным регуляторам 44
3-4. Релейно-контактные корректирующие приставки............................ 48
Глава 1. Принципы работы
и расчет настройки двухпозиционных регуляторов
Характеристики двухпозиционных регуляторов
Двухпозиционными регуляторами называют такие регуляторы, выходная величина которых может принимать только два установившихся значения. Так, если в качестве выходного элемента двухпозиционного регулятора используется реле, то одно установившееся значение выходной величины соответствует отключенному состоянию реле, а второе включенному. В связи с этим двухпозиционные регуляторы иногда называют регуляторами, работающими по принципу «да-нет», или, исходя из двоичной системы счисления, регуляторами с законом регулирования «0-1».
Автоматический регулятор в общем случае состоит из задающего устройства ЗУ, измерительного устройства ИУ, суммирующего устройства СУ, усилителя У и исполнительного механизма ИМ.
Функциональная схема автоматического регулятора приведена на рис. 1-1.
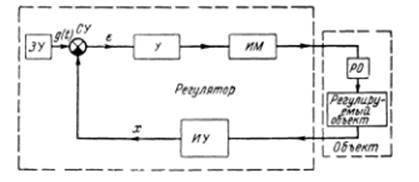
Рис. 1-1. Функциональная схема одноконтурной системы автоматического регулирования
Автоматический регулятор, воздействуя на регулирующий орган, обеспечивает заданное значение регулируемой величины в регулируемом объекте. Так как регулирующий орган РО является устройством, воспринимающим регулирующее воздействие регулятора на объект, то РО принято рассматривать как составную часть объекта регулирования.
В суммирующем устройстве регулятора значение регулируемой величины х, поступающее от измерительного устройства, сравнивается с ее заданным значением  , поступающим от задающего устройства. Если действительное значение регулируемой величины не равно ее заданному значению, то их разность, или сигнал ошибки
, поступающим от задающего устройства. Если действительное значение регулируемой величины не равно ее заданному значению, то их разность, или сигнал ошибки  поступает на вход регулятора, который при этом воздействует на объект регулирования таким образом, чтобы восстановить заданное значение регулируемой величины.
поступает на вход регулятора, который при этом воздействует на объект регулирования таким образом, чтобы восстановить заданное значение регулируемой величины.
Усилительное устройство регулятора усиливает сигнал ошибки  , преобразует ее в тот или иной вид энергии, необходимый для управления исполнительным механизмом регулятора, а также формирует требуемый закон регулирования.
, преобразует ее в тот или иной вид энергии, необходимый для управления исполнительным механизмом регулятора, а также формирует требуемый закон регулирования.
Подача регулируемой величины х на вход регулятора называется главной обратной связью.
Для получения требуемого закона регулирования в регуляторе в общем случае применяют также местные обратные связи, а также последовательные и параллельные корректирующие устройства.
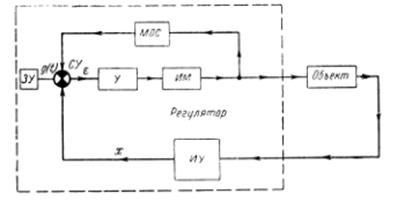
Рис. 1-2. Функциональная схема многоконтурной системы автоматического регулирования
На рис. 1-2 представлена функциональная схема автоматического регулятора с местной обратной связью, через которую выход с исполнительного механизма поступает на вход регулятора.
Выходная величина измерительного устройства ИУ – это значение регулируемой величины в данный момент времени.
Измерительное устройство преобразует регулируемую величину к виду, удобному для сравнения ее с заданным значением в суммирующем устройстве СУ. В связи с этим в принято относить измерительное устройство к суммирующему устройству или к объекту регулирования.
Обозначим передаточную функцию регулятора  , а передаточную функцию объекта
, а передаточную функцию объекта  . Таким образом, система автоматического регулирования по каналу регулирующего воздействия может быть представлена в виде структурной схемы, изображенной на рис. 1-3.
. Таким образом, система автоматического регулирования по каналу регулирующего воздействия может быть представлена в виде структурной схемы, изображенной на рис. 1-3.
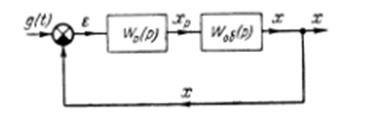
Рис. 1-3. Структурная схема системы автоматического регулирования по каналу регулирующего воздействия
На рис. 1-4 представлена система автоматического регулирования уровня с двухпозиционным регулятором. В бак 1 вода подается центробежным насосом 2, который приводится во вращение электродвигателем Д. Когда уровень воды поднимается до контактного электрода Э, замыкается цепь промежуточного реле Р, которое разорвет цепь магнитного пускателя ПМ и электродвигатель Д остановится. Благодаря расходу воды потребителям Q от [м3/с], уровень воды в баке будет понижаться, цепь реле Р разомкнется, магнитный пускатель ПМ сработает, электродвигатель Д включится и, вращая центробежный насос, будет подавать воду в бак Q пр [м3/с].
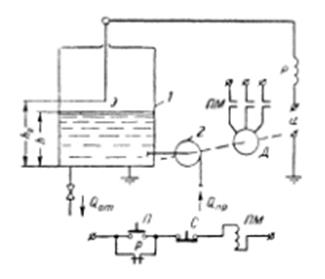
Рис. 1-4. Система автоматического регулирования уровня с двухпозиционным регулятором без зоны неоднозначности
Двухпозиционный регулятор системы состоит из контактного электрода Э, который является измерительным устройством регулятора, промежуточного реле Р и магнитного пускателя ПМ, образующих усилительное устройство, и исполнительного механизма в виде электродвигателя Д.
Заданное значение уровня устанавливается путем перемещения контактного электрода Э. Таким образом, контактный электрод одновременно служит измерительным, задающим и суммирующим устройством регулятора.
На рис. 1-5 а представлена статическая характеристика двухпозиционного регулятора рис. 1-4. При заданном уровне  и ее действительном значении h входная величина регулятора равна
и ее действительном значении h входная величина регулятора равна  .
.
Данный регулятор практически не имеет зоны неоднозначности.
При  и
и  цепь промежуточного реле Р замкнута, электродвигатель Д вращается с номинальным числом оборотов
цепь промежуточного реле Р замкнута, электродвигатель Д вращается с номинальным числом оборотов  и результирующее поступление воды в бак равно
и результирующее поступление воды в бак равно  .
.
При  и
и  цепь промежуточного реле Р разомкнут, электродвигатель Д находится в покое
цепь промежуточного реле Р разомкнут, электродвигатель Д находится в покое  и результирующее воздействие системы на объект равно
и результирующее воздействие системы на объект равно  .
.
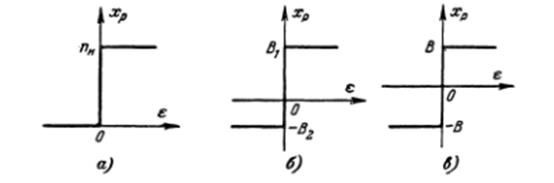
Рис. 1-5. Статические характеристики двухпозиционного регулятора без зоны неоднозначности
Статическая характеристика (рис. 1-5 а) регулятора (рис. 1-4) аналитически определяется зависимостями:
 (1-1)
(1-1)
При исследовании систем автоматического регулирования за нулевое, исходное состояние системы принимается ее условно установившееся состояние, при котором регулируемая величина равна заданному значению. Все величины в системе отсчитываются от условно установившегося состояния. Перенося начало координат на рис. 1-5 а в точку, соответствующую числу оборотов  электродвигателя Д, обеспечивающему при постоянном расходе
электродвигателя Д, обеспечивающему при постоянном расходе  , т.е.
, т.е.  , получим статическую характеристику, изображенную на рис. 1-5 б двухпозиционного регулятора рис. 1-4 в приращениях от заданного или условно равновесного состояния.
, получим статическую характеристику, изображенную на рис. 1-5 б двухпозиционного регулятора рис. 1-4 в приращениях от заданного или условно равновесного состояния.
Обозначив в общем случае регулирующее воздействие регулятора на объект через  и
и  в приращения от условного равновесного состояния, получим:
в приращения от условного равновесного состояния, получим:
 (1-2)
(1-2)
С учетом этого между значениями выходной величины регулятора на рис. 1-5 а и 1-5 б имеется очевидная зависимость


 .
.
При  получим симметричную статическую характеристику, представленную на рис. 1-5 в. Симметричная статическая характеристика двухпозиционного регулятора определяется выражениями
получим симметричную статическую характеристику, представленную на рис. 1-5 в. Симметричная статическая характеристика двухпозиционного регулятора определяется выражениями
 (1-3)
(1-3)
Система автоматического регулирования, изображенная на рис. 1-4 обеспечивает заданное значение уровня . Однако основной ее недостаток состоит в том, что электродвигатель Д работает в режиме частых кратковременных включений, в результате чего сокращается срок его службы и увеличивается расход электроэнергии на пусковые токи.
Если же по условиям технологии необходимо строго поддерживать заданное значение уровня в баке, то при достаточно мощном электродвигателе нужно применять другие автоматические регуляторы с более сложным законом регулирования, например, ПИ-регуляторы.
Если же допустимо колебание уровня в баке в пределах  от заданного, то в этом случае целесообразно применить двухпозиционный регулятор, изображенный на рис. 1-6.
от заданного, то в этом случае целесообразно применить двухпозиционный регулятор, изображенный на рис. 1-6.
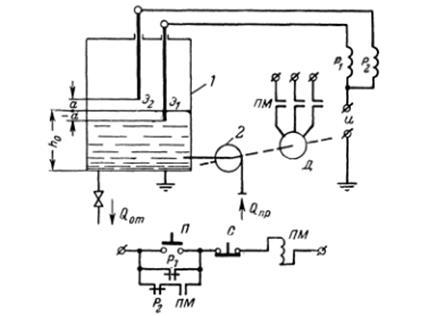
Рис. 1-6. Система автоматического регулирования уровня с двухпозиционным регулятором с зоной неоднозначности
В отличие от схемы на рис. 1-4 этот регулятор имеет два контактных электрода Э 1 и Э 2 и два промежуточных реле управления Р 1 и Р 2. Контактный электрод Э 1 устанавливается на нижний допустимый уровень воды в баке, а электрод Э 2 устанавливается в положение, соответствующее верхнему допустимому уровню в баке. Расстояние между электродами по высоте равно допустимому колебанию уровня воды в баке  .
.
При выключении регулятора через размыкающий контакт реле Р 1 включается магнитный пускатель ПМ и электродвигатель Д начинает вращаться, подавая воду в бак. Одновременно замыкается цепь самоблокировки катушки магнитного пускателя через размыкающий контакт реле Р 2. Когда уровень в баке достигает электрода Э 1, включается реле Р 1, но при этом катушка магнитного пускателя не обесточится, так как остается включенной цепь самоблокировки. Когда уровень достигнет электрода Э 2, включится реле Р 2, которое своим контактом разорвет цепь самоблокировки катушки магнитного пускателя и электродвигатель остановится. После этого благодаря постоянному расходу воды из бака  уровень начнет понижаться. При этом сначала разорвется цепь реле Р 2 и через его контакт включится магнитный пускатель ПМ. После этого процесс регулирования будет повторяться.
уровень начнет понижаться. При этом сначала разорвется цепь реле Р 2 и через его контакт включится магнитный пускатель ПМ. После этого процесс регулирования будет повторяться.
На рис. 1-7 а представлены статические характеристики описанного двухпозиционного регулятора с зоной неоднозначности, равной  .
.
На рис. 1-7 б представлены статические характеристики описанного двухпозиционного регулятора, формирующего регулирующее воздействие регулятора на объект  и
и  в приращениях от условного равновесного состояния с зоной неоднозначности, также равной .
в приращениях от условного равновесного состояния с зоной неоднозначности, также равной .
Аналитически такая характеристика описывается зависимостями
 (1-4)
(1-4)
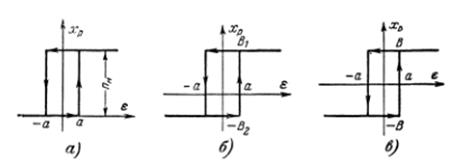
Рис. 1-7. Статические характеристики двухпозиционного регулятора с зоной неоднозначности
При  получим симметричную статическую характеристику двухпозиционных регуляторов с зоной неоднозначности, представленную на рис. 1-7 в. Эта характеристика описывается следующими зависимостями
получим симметричную статическую характеристику двухпозиционных регуляторов с зоной неоднозначности, представленную на рис. 1-7 в. Эта характеристика описывается следующими зависимостями
 (1-5)
(1-5)
В системе автоматического регулирования на рис. 1-6 величина зоны неоднозначности может изменяться перемещением контактных электродов относительно друг друга. Заданное значение регулируемой величины устанавливается совместным перемещением контактных электродов.
В некоторых двухпозиционных регуляторах зона неоднозначности определяется физическими свойствами тех или иных элементов, входящих в состав регулятора, и уменьшение зоны неоднозначности в этих регуляторах сопряжено с определенными трудностями. Так как, чем больше зона неоднозначности, тем больше диапазон колебаний регулируемой величины, то при выборе элементов двухпозиционного регулятора необходимо всегда учитывать это обстоятельство. На рис. 1-8 представлена система автоматического регулирования температуры с двухпозиционным регулятором.
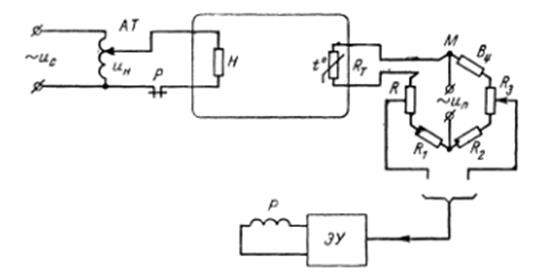
Рис. 1-8. Система автоматического регулирования температуры
с двухпозиционным регулятором без зоны неоднозначности
При включении регулятора через размыкающий контакт реле Р на нагревательный элемент Н объекта регулирования подается напряжение с автотрансформатора АТ. Когда температура объекта меньше заданной, измерительный мост М разбалансирован и на вход электронного усилителя ЭУ подается переменное напряжение в противофазе с питающим его напряжением и на выходе ЭУ напряжение будет равным нулю. Когда температура достигнет заданного значения, то благодаря увеличению величины сопротивления температура резистора R т, измерительный мост будет сбалансирован. При дальнейшем увеличении температуры на выходе измерительного моста переменное напряжение, совпадающее по фазе с напряжением ЭУ. Это напряжение будет усиливаться и подаваться на реле Р. Когда выходное напряжение ЭУ достигнет величины напряжении срабатывания u ср реле Р, реле срабатывает и нагревательный элемент Н отключается.
Температура объекта начинает уменьшаться. Также будет уменьшаться выходное напряжение ЭУ. При уменьшении этого напряжения до величины u от реле, реле отпустит и через его контакт возобновится подача энергии в объект.
Зона неоднозначности регулятора равна
 , (1-6)
, (1-6)
где  – общий коэффициент передачи участка цепи системы регулирования, включая термометр сопротивления, измерительный мост и электронный усилитель. Заданное значение регулируемой величины устанавливается перемещением движка резистора R з.
– общий коэффициент передачи участка цепи системы регулирования, включая термометр сопротивления, измерительный мост и электронный усилитель. Заданное значение регулируемой величины устанавливается перемещением движка резистора R з.
Статическая характеристика двухпозиционного регулятора, изображенного на рис. 1-8, представлена на рис. 1-9.
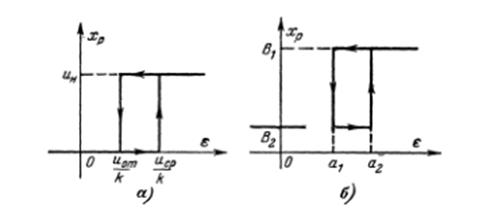
Рис. 1-9. Статическая характеристика двухпозиционного регулятора системы рис. 1-8
Если при настройке двухпозиционного регулятора заданное значение регулируемой величины уменьшить против его действительно необходимого значения на величину  , то характеристику рис. 1-9 а можно привести к виду рис. 1-7 а или, в приращениях от заданного состояния системы, к виду, рис. 1-7 б или 1-7 в.
, то характеристику рис. 1-9 а можно привести к виду рис. 1-7 а или, в приращениях от заданного состояния системы, к виду, рис. 1-7 б или 1-7 в.
Статические характеристики рис. 1-7 б и в двухпозиционного регулятора рис. 1-8 можно также получить путем изменения величины постоянного напряжения на базе входного транзистора первого каскада усиления ЭУ.
Из выражения (1-6) следует, величина зоны неоднозначности характеризуется электромагнитными и электромеханическими свойствами выходного реле, которые определяют величины напряжения его срабатывания и отпускания. Отношение напряжения отпускания к напряжению срабатывания называется коэффициентом возврата реле.
Таким образом, для обеспечения небольшой зоны неоднозначности двухпозиционного регулятора необходимо выходное реле выбирать с большим коэффициентом возврата.
При выбранном реле зона неоднозначности может быть уменьшена путем увеличения коэффициента усиления электронного усилителя.
В общем случае статическая характеристика двухпозиционного регулятора с зоной нечувствительности имеет вид, представленный на рис. 1-9 б.
Такую характеристику имеет, например, регулятор, изображенный на рис. 1-10.
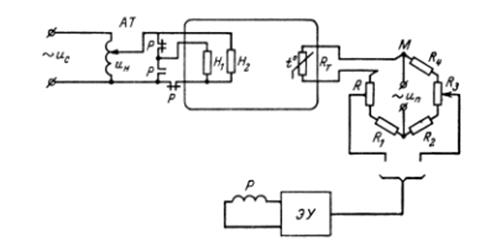
Рис. 1-10. Система двухпозиционного автоматического регулирования температуры с неполным оттоком энергии
При температуре в объекте меньше заданной нагревательные элементы Н 1 и Н 2 размыкающими контактами реле Р соединяются параллельно и на каждый нагревательный элемент подается от автотрансформатора полное напряжение. При достижении температурой заданного значения и дальнейшем ее повышении срабатывает реле Р, его размыкающие контакты размыкаются. С помощью замыкающего контакта реле Р нагревательные элементы соединяются последовательно. При одинаковом сопротивлении нагревательных элементов напряжение на каждом из них уменьшается в 2 раза. В результате чего в 4 раза уменьшается подача энергии в объект.
Однако при этом путем соответствующей настройки электронного усилителя или корректировки задания в приращениях от условного равновесного состояния можно статическую характеристику привести в виду рис. 1-7 б и в. При зоне неоднозначности, равной нулю, получим статические характеристики рис. 1-5 б и в.
Таким образом, основными статическими характеристиками двухпозиционных регуляторов являются характеристики, представленные на рис. 1-5 б и в и рис. 1-7 б и в. С учетом рис. 1-3 структурная схема системы автоматического регулирования с двухпозиционным регулятором ДР представлена на рис. 1-11.
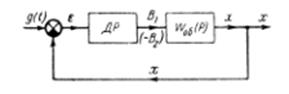
Рис. 1-11. Структурная схема системы автоматического регулирования с двухпозиционным регулятором






