СОДЕРЖАНИЕ
| ВВЕДЕНИЕ…………………………………………………………………………………
|
|
| 1 ОБЩАЯ ЧАСТЬ
|
|
| Техническая характеристика объекта…………………………………………………….
|
|
| 2 ЭЛЕКТРОМЕХАНИЧЕСКИЙ РСЧЕТ ОБОРУДОВАНИЯ
|
|
| 2.1 Построение нагрузочной диаграммы механизма и предвартельный выбор двигателя ……………………………………………………………………………………………………..
|
|
| 2.2 Расчет естественной и искусственной характеристики двигатля..............................
|
|
| 2.3 Построение пусковой диаграммы…………………………………………………….
2.4 Расчет сопротивлений……………………………………………………....................
|
|
| 2.5 Расчет переходных процессов……………………………………………...................
|
|
| 2.6 Построение нагрузочной диаграммы двигателя и его проверка………....................
2.7 Проектирование принципиальной электрической схемы…………………………...
|
|
| 2.7.1 Проектирование силовой цепи……………………………... ………………..
|
|
| 2.7.2 Проектирование цепи управления…………………………………………….
|
|
| 2.7.3 Описание работы схемы………………………………………….....................
|
|
| 2.7.4 Выбор аппаратуры управления и защиты……………………………………
|
|
| Заключение……………………………………………………………………....................
Список используемой литературы……………………………………..............................
|
|
ОБЩАЯ ЧАСТЬ
ПОСТРОЕНИЕ НАГРУЗОЧНОЙ ДИАГРАММЫ МЕХАНИЗМА И ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР ДВИГАТЕЛЯ
Момент на валу барабана и момент сопротивления на валу двигателя должны быть рассчитаны для трех режимов: подъем и спуск груженой тележки, спуск порожней тележки. Одновременно для этих режимов определяется режим работы двигателя: если направление вращения барабана совпадает с направлением действия момента, то последний является движущим и, следовательно, электродвигатель работает в тормозном режиме; в противном случае момент будет двигательным.
В дальнейшем будем использовать модули полученных моментов, так как их знаки зависят от направления вращения, принятого за положительное. Получаемые же в данном расчете знаки не имеют такой привязки, они определяют только режим работы двигателя: двигательный (положительный), тормозной (отрицательный).
1 Подъем груженой тележки.
Вес тележки будет равен:
G = (mн + mо) · g = (4000 + 1500) · 9,8 = 53900 (1)[4]
mн – масса поднимаемого груза
mо – масса тележки
g – ускорение свободного падения
Для определения результирующего усилия на ободе барабана необходимо вес тележки разложить на составляющие:
G1= G · sin a = G· sin 60 = 53900 · 0,866 = 46677 Н (2)[4]
G2 = G · cos a = G · cos 60 = 53900 · 0,5 = 26950 Н (3)[4]
Сила трения при движении тележки равна:
Fтр = G2 · К = 26950· 0,025= 673 Н (4)[4]
Усилие натяжения подъемного каната тележки равно:
F1 = G1 + Fтр = 46677 + 637 = 47350Н (5)[4]
Усилие натяжения каната противовеса равно:
F2 = g · mп = 9,8 · 2700= 26460 Н (6)[4]
Момент на валу барабана находится:
Мб = 1/2 · Dб · (Fнаб · 1/hб – Fсб · hб) (7)[4]
В данном случае Fнаб - усилие на набегающей ветви каната, Fсб- усилие на сбегающей ветви каната.
Mб1 = 1/2 · 0.6 · (47350· 1/0,95 – 26460· 0,95) = 7411,5 Н·м (8)[4]
Режим работы двигателя - двигательный.
2 Спуск порожней тележки.
Вес тележки будет равен:
G= m0 · g = 1500 · 9,8 = 14700 Н
G1=14700·sin60=14700·0,866=12730Н
G2 = 14700 · cos 60 = 14700 · 0,5 = 7350 Н
Fтр = 7350 · 0,025 = 183 Н
F1=12730-183=12547Н
F2 = g · mп = 9,8 · 2700 =26460 Н
В данном случае F2 =Fнаб усилие на набегающей ветви каната, F1=Fсб - усилие на сбегающей ветви каната.
Мб2 = 1/2 ·0,6 · (26460· 1/0,95 - 12547· 0,95) = 4779 Н·м
Режим работы двигателя - двигательный.
3 Спуск груженой тележки.
Вес тележки будет равен:
G = (mп+mo) · g = (4000 + 1500) · 9,8 = 53900 Н
По формулам находим:
G1= 53900· sin 60 =53900 · 0,866 = 46677 Н
G2 = 53900 · cos 60 = 53900 · 0,5 = 26950 Н
Fтр = 26950 · 0,025 = 673 Н
F1= 46677– 637 = 46004 Н
F2 = g · mп = 9,8 · 2700 = 26460 Н
В данном случае F2 - усилие на набегающей ветви каната, F1 - усилие на сбегающей ветви каната.
Мб3 = 1/2 · 0,6 · (26460 · 1/0,95 - 46004· 0,95) = - 4755 Н·м (9)[4]
Режим работы двигателя – тормозной
Приведение сил и моментов к валу двигателя производится согласно формулам:
двигательный режим: тормозной режим:
Мд =  Мд =
Мд =  (10)[4]
(10)[4]
тогда для первых двух режимов имеем:
МС1 = МД1 =  = 201,3 Н·м
= 201,3 Н·м
МС2 = МД2 =  = 129Н·м
= 129Н·м
для третьего режима имеем:
МС3 = МД3 =  = - 109,3 Н·м
= - 109,3 Н·м
Построение упрощенной нагрузочной диаграммы
Под нагрузочной диаграммой механизма понимается зависимость от времени момента или мощности статической нагрузки на валу двигателя за цикл работы механизма. Рабочими являются первый и второй режимы: подъем груженой тележки и спуск порожней. На данном этапе можно построить лишь упрощенную нагрузочную диаграмму, пренебрегая временем и путем переходных процессов. Тогда цикл работы будет складываться из времени установившегося движения (ty = lо /VH) и времени пауз (tо).
tу = lo / Vн = 20 / 0,8 = 25 сек; (11)[3]
tо = 40 сек;
tц = 2·(25+40) = 130 сек
Рисунок 5 Упрощенная нагрузочная диаграмма
Предварительный выбор двигателя
Нагрузочная диаграмма механизма является исходным материалом для предварительного выбора двигателя.
По упрощенной нагрузочной диаграмме определяют ПВ и среднеквадратичный момент
Мск =  =
=  =
=  = 169,3 Н·м (12)[3]
= 169,3 Н·м (12)[3]
ПВр =  =
=  = 0,384 (13)[3]
= 0,384 (13)[3]
Выбор типоразмера двигателя производится исходя из двух условий:
а) номинальный момент двигателя должен удовлетворять условию:
Мн  К3 · Мск ·
К3 · Мск ·  = 1,2 · 169,3 ·
= 1,2 · 169,3 ·  = 199 (14)[3]
= 199 (14)[3]
где К3 = 1,2 - коэффициент запаса, учитывающий влияние динамических нагрузок;
ПВН = 40 % - номинальная продолжительность включения двигателей повторно-кратковременного режима работы.
б) номинальная скорость двигателя должна выбираться ближайшей к номинальной скорости механизма VH, пересчитанной на вал двигателя:
nнм =  =
=  = 1019 об/мин (15)[3]
= 1019 об/мин (15)[3]
Таким образом, мы должны выбрать двигатель с моментом, ближайшим большим к 199 Н·м, и скоростью около 1019 об/мин. Первое условие необходимо соблюдать точно, второе - по возможности.
ωн =  =
=  = 106 рад/c
= 106 рад/c
Рн = Мн · ωн = 199· 106 = 21094 Вт (16)[3]
На этих основаниях выбираем асинхронный двигатель с фазным ротором 4МТ 200 6.
Его паспортные характеристики следующие:
Таблица 2 Техническая характеристика асинхронных двигателей с фазным ротором 4 МТ, 380 В, 50 Гц, ПВ=40%
| Тип двигателя
| Число полюсов
| Мощность
кВт
| Частота вращения об/мин
| I 1 ном
А
| E 2м
В
| I2 ном
A
А
| M max
Н*м
| J д
кг/ 
|
| 4МТ200 6
| 6
| 22
| 935
| 55
| 35
| 60
| 638
| 0.57
|
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Определение момента инерции системы
Для расчета динамических режимов необходимо определить приведенный к валу двигателя момент инерции системы. Он определяется для груженой и порожней тележек и состоит из суммы моментов инерции и масс элементов.
Для груженой тележки:
Jг = Jдв + Jш + Jр + Jб · 1/iр2 + (mн + m0 + mп) ·  (33)[3]
(33)[3]
Воспользовавшись вышеприведенной формулой пересчета и соотношениями, приведенными в исходных данных, получим для груженой тележки:
Jг = Jдв + 0,2 · Jдв + 0,25 · Jдв + Jб · 1/iр2 + (mн + m0 + mп) ·  или
или
Jг = 1,45 · Jдв + Jб · 1/iр2 + (mн + m0 + mп) · 
Jг = 0.57+0.57*0.2+0.57*0.25+100/  +(4000+1500+2700)*
+(4000+1500+2700)*  = 1,35 кг·м2
= 1,35 кг·м2
Для порожней тележки:
Jп = 0.57+0.57*0.2+0.57*0.25+100/ +(1500+2700) ·  = 1,12 кг·м2
= 1,12 кг·м2
Расчет продолжительности разгона по ступеням реостата
Продолжительность пуска рассчитывается для обоих рабочих режимов. При линейной части механической характеристики в рабочей зоне и Мс = const время работы на ступени равно:
tx = Tx · ln 
где Tx - механическая постоянная для соответствующей реостатной характеристики.
Поскольку величина нагрузки неизменна (Мс=const), то значение логарифма в формуле времени одинаково для всех ступеней работы.
Груженая тележка
K1 = ln  =ln
=ln  = ln14,8=2,01; (34)[2]
= ln14,8=2,01; (34)[2]
Порожняя тележка
k2 = ln=  =ln
=ln  = ln 3,9=1.36
= ln 3,9=1.36
Механическая постоянная времени - это время, необходимое для ускорения привода с моментом инерции J от начальной скорости на данной ступени до скорости идеального холостого хода ω0.
Tx =  (35)[1]
(35)[1]
Механическая постоянная времени:
Продолжительность пуска для обоих режимов:
1) Подъем груженной тележки.
1 реостатная характеристика
TM1=J  =1,01с
=1,01с
t1 = к1ТМ1 = 2,01*1,01 = 2,01 с.
2 реостатная характеристика
TM2=J  =1,38с
=1,38с
t2 = к1ТМ2 = 1,36*1,38 = 1,8 с.
Естественная характеристика
Tе=J  =1,35*
=1,35*  *0,065=0,041с
*0,065=0,041с
tе = к1Те = 2,69*0,041 = 0,11с
2) Спуск пустой тележки
1 реостатная характеристика
TM1=J  =1,35 с
=1,35 с
t1 = к1ТМ1 = 1,36*1,35 = 1,8 с.
2 реостатная характеристика
TM2=J  =0,98с
=0,98с
t2 = к1ТМ2 = 1,36*0,98 = 1,003с
Естественная характеристика
tе=к1Те=0,04с
Расчет пути, проходимого тележкой во время пуска двигателя
Для упрощения разгон принимается равноускоренным со средним ускорением:
aср = Vуст / tп
где tn - продолжительность пуска; tn = Σti + 3 · Te
где ti - продолжительность разгона на каждой реостатной характеристике;
Те - механическая постоянная привода на естественной характеристике двигателя.
Vуст- скорость механизма в рабочих режимах;
Путь, пройденный за время разгона, приближенно определяется:
Lп =  (36)[1]
(36)[1]
а) При подъеме груженой тележки
tп = t1 + t2 + t3 +t4+ 3·Te = 4,39+3,2+3*0,041= 7,7с
aср = Vуст / tп = 0,77 / 7,7 = 0,1 м/с2
Lп =  = 2,9 м
= 2,9 м
б) При спуске порожней тележки
tс = t1 + t2 + t3 +t4+ 3·Te = 1,8+1,3+3*0,04= 3,2 с
aср = 0, 74 / 3,2 = 0,2 м/с2
Lп =  = 1,02 м
= 1,02 м
Определение продолжительности и пути торможения двигателя
При торможении двигателя противовключением замедление осуществляется под действием статического момента и момента электромагнитного тормоза:
-Мс – Мт = JM 
tт =  (37)[2]
(37)[2]
JM - момент инерции системы для груженой и пустой тележки;
ωнач - установившаяся скорость предшествующего режима;
Мci - статический момент для спуска и подъема;
Mтор = 1,7 · Mcmax = 1,7 · 201,3 = 342.21 М·н
Путь, пройденный во время торможения, определяется аналогично пути при пуске.
а) Подъем груженой тележки
tT1=  ; tт1 =
; tт1 =  = 0,25 с
= 0,25 с
Lт1 =  ; Lт1 =
; Lт1 =  = 0,09 м
= 0,09 м
б) Спуск порожней тележки
tT2=  ; tт2 =
; tт2 =  = 0,23 с
= 0,23 с
Lт2 =  ; Lт2 =
; Lт2 =  = 0,08 м
= 0,08 м
Заключение
По Курсовой проект выполнил согласно нормам и правил курсового и технологического проектирования СН и П., ГОСТ и ЕСКД.
В ходе расчета курсового расчета, мною был выбран электродвигатель марки 4МТ200 6, наиболее соответствующий расчетам курсового проекта, для электропривода наклонного подъемника с противовесом.
СПИСОК ЛИТЕРАТУРЫ
1 Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – М.: Энергоиздат, 1981.
2 Москаленко В.В. Автоматизированный электропривод. – М.: Энергоатомиздат, 1986.
3 Алиев И.И. Справочник по электротехнике и электрооборудованию. – М.: Высшая школа, 2000.
4 Самкова Р.М. Электрическое и электромеханическое оборудование.- БПЭК 2009
5 Демкина И.А., Рудакова Г.А. Методическое пособие по оформлению текстовых документов г.Бежецк 2003
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ…………………………………………………………………………………
|
|
| 1 ОБЩАЯ ЧАСТЬ
|
|
| Техническая характеристика объекта…………………………………………………….
|
|
| 2 ЭЛЕКТРОМЕХАНИЧЕСКИЙ РСЧЕТ ОБОРУДОВАНИЯ
|
|
| 2.1 Построение нагрузочной диаграммы механизма и предвартельный выбор двигателя ……………………………………………………………………………………………………..
|
|
| 2.2 Расчет естественной и искусственной характеристики двигатля..............................
|
|
| 2.3 Построение пусковой диаграммы…………………………………………………….
2.4 Расчет сопротивлений……………………………………………………....................
|
|
| 2.5 Расчет переходных процессов……………………………………………...................
|
|
| 2.6 Построение нагрузочной диаграммы двигателя и его проверка………....................
2.7 Проектирование принципиальной электрической схемы…………………………...
|
|
| 2.7.1 Проектирование силовой цепи……………………………... ………………..
|
|
| 2.7.2 Проектирование цепи управления…………………………………………….
|
|
| 2.7.3 Описание работы схемы………………………………………….....................
|
|
| 2.7.4 Выбор аппаратуры управления и защиты……………………………………
|
|
| Заключение……………………………………………………………………....................
Список используемой литературы……………………………………..............................
|
|
ОБЩАЯ ЧАСТЬ
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МЕХАНИЗМА
Таблица 1
| Наименование параметра
| Числовое
значение
|
| 1. Диаметр барабана, Дб
| 0,6 м
|
| 2. Коэффициент полезного действия редуктора, ηр
| 0,92
|
| 3. Коэффициент полезного действия барабана, ηб
| 0,95
|
| 4. Коэффициент сопротивления движению тележки, К
| 0,025
|
| 5. Момент инерции барабана, Jб
| 100 кт·м2
|
| 6. Момент инерции тормозного шкива, Jш, где Jд – момент инерции двигателя
| Jш=0,2Jд
|
| 7. Момент инерции редуктора, Jр, где Jд – момент инерции двигателя
| Jр=0,25Jд
|
| 8. Тормозной момент электромагнитного тормоза, Мт, где Мс – максимальный статический момент на валы
| МТ=1,7Мс
|
| 9. Масса поднимаемого груза, кг
| 4000 кг
|
| 10. Масса тележки, кг
| 1500 кг
|
| 11. Масса противовеса, кг
| 2700 кг
|
| 12. Путь подъёма, м
| 20 м
|
| 13. Угол подъёма, град
| 60 град
|
| 14. Номинальная линейная скорость движения, м/с
| 0,8 м/с
|
| 15. Передаточное число редуктора
| 40
|
| 16. Кратность максимального пускового момента двигателя, (М1-максимальный пусковой момент двигателя, Мн-нормальный момент двигателя)
| 2.2
|
| 17. Продолжительность загрузки (разгрузки) тележки (время одинаковое), с
| 40 с
|
| 18. Род тока сети: переменный
| 380 В
|
| 19. Число ступеней реостата
| 2
|
| 20. Средство управления электроприводом
| Кнопочный пост
|
|
|
|
|
ПОСТРОЕНИЕ НАГРУЗОЧНОЙ ДИАГРАММЫ МЕХАНИЗМА И ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР ДВИГАТЕЛЯ
Момент на валу барабана и момент сопротивления на валу двигателя должны быть рассчитаны для трех режимов: подъем и спуск груженой тележки, спуск порожней тележки. Одновременно для этих режимов определяется режим работы двигателя: если направление вращения барабана совпадает с направлением действия момента, то последний является движущим и, следовательно, электродвигатель работает в тормозном режиме; в противном случае момент будет двигательным.
В дальнейшем будем использовать модули полученных моментов, так как их знаки зависят от направления вращения, принятого за положительное. Получаемые же в данном расчете знаки не имеют такой привязки, они определяют только режим работы двигателя: двигательный (положительный), тормозной (отрицательный).
1 Подъем груженой тележки.
Вес тележки будет равен:
G = (mн + mо) · g = (4000 + 1500) · 9,8 = 53900 (1)[4]
mн – масса поднимаемого груза
mо – масса тележки
g – ускорение свободного падения
Для определения результирующего усилия на ободе барабана необходимо вес тележки разложить на составляющие:
G1= G · sin a = G· sin 60 = 53900 · 0,866 = 46677 Н (2)[4]
G2 = G · cos a = G · cos 60 = 53900 · 0,5 = 26950 Н (3)[4]
Сила трения при движении тележки равна:
Fтр = G2 · К = 26950· 0,025= 673 Н (4)[4]
Усилие натяжения подъемного каната тележки равно:
F1 = G1 + Fтр = 46677 + 637 = 47350Н (5)[4]
Усилие натяжения каната противовеса равно:
F2 = g · mп = 9,8 · 2700= 26460 Н (6)[4]
Момент на валу барабана находится:
Мб = 1/2 · Dб · (Fнаб · 1/hб – Fсб · hб) (7)[4]
В данном случае Fнаб - усилие на набегающей ветви каната, Fсб- усилие на сбегающей ветви каната.
Mб1 = 1/2 · 0.6 · (47350· 1/0,95 – 26460· 0,95) = 7411,5 Н·м (8)[4]
Режим работы двигателя - двигательный.
2 Спуск порожней тележки.
Вес тележки будет равен:
G= m0 · g = 1500 · 9,8 = 14700 Н
G1=14700·sin60=14700·0,866=12730Н
G2 = 14700 · cos 60 = 14700 · 0,5 = 7350 Н
Fтр = 7350 · 0,025 = 183 Н
F1=12730-183=12547Н
F2 = g · mп = 9,8 · 2700 =26460 Н
В данном случае F2 =Fнаб усилие на набегающей ветви каната, F1=Fсб - усилие на сбегающей ветви каната.
Мб2 = 1/2 ·0,6 · (26460· 1/0,95 - 12547· 0,95) = 4779 Н·м
Режим работы двигателя - двигательный.
3 Спуск груженой тележки.
Вес тележки будет равен:
G = (mп+mo) · g = (4000 + 1500) · 9,8 = 53900 Н
По формулам находим:
G1= 53900· sin 60 =53900 · 0,866 = 46677 Н
G2 = 53900 · cos 60 = 53900 · 0,5 = 26950 Н
Fтр = 26950 · 0,025 = 673 Н
F1= 46677– 637 = 46004 Н
F2 = g · mп = 9,8 · 2700 = 26460 Н
В данном случае F2 - усилие на набегающей ветви каната, F1 - усилие на сбегающей ветви каната.
Мб3 = 1/2 · 0,6 · (26460 · 1/0,95 - 46004· 0,95) = - 4755 Н·м (9)[4]
Режим работы двигателя – тормозной
Приведение сил и моментов к валу двигателя производится согласно формулам:
двигательный режим: тормозной режим:
Мд = Мд = (10)[4]
тогда для первых двух режимов имеем:
МС1 = МД1 = = 201,3 Н·м
МС2 = МД2 = = 129Н·м
для третьего режима имеем:
МС3 = МД3 = = - 109,3 Н·м
Построение упрощенной нагрузочной диаграммы
Под нагрузочной диаграммой механизма понимается зависимость от времени момента или мощности статической нагрузки на валу двигателя за цикл работы механизма. Рабочими являются первый и второй режимы: подъем груженой тележки и спуск порожней. На данном этапе можно построить лишь упрощенную нагрузочную диаграмму, пренебрегая временем и путем переходных процессов. Тогда цикл работы будет складываться из времени установившегося движения (ty = lо /VH) и времени пауз (tо).
tу = lo / Vн = 20 / 0,8 = 25 сек; (11)[3]
tо = 40 сек;
tц = 2·(25+40) = 130 сек
Рисунок 5 Упрощенная нагрузочная диаграмма
Предварительный выбор двигателя
Нагрузочная диаграмма механизма является исходным материалом для предварительного выбора двигателя.
По упрощенной нагрузочной диаграмме определяют ПВ и среднеквадратичный момент
Мск = = = = 169,3 Н·м (12)[3]
ПВр = = = 0,384 (13)[3]
Выбор типоразмера двигателя производится исходя из двух условий:
а) номинальный момент двигателя должен удовлетворять условию:
Мн К3 · Мск · = 1,2 · 169,3 · = 199 (14)[3]
где К3 = 1,2 - коэффициент запаса, учитывающий влияние динамических нагрузок;
ПВН = 40 % - номинальная продолжительность включения двигателей повторно-кратковременного режима работы.
б) номинальная скорость двигателя должна выбираться ближайшей к номинальной скорости механизма VH, пересчитанной на вал двигателя:
nнм = = = 1019 об/мин (15)[3]
Таким образом, мы должны выбрать двигатель с моментом, ближайшим большим к 199 Н·м, и скоростью около 1019 об/мин. Первое условие необходимо соблюдать точно, второе - по возможности.
ωн = = = 106 рад/c
Рн = Мн · ωн = 199· 106 = 21094 Вт (16)[3]
На этих основаниях выбираем асинхронный двигатель с фазным ротором 4МТ 200 6.
Его паспортные характеристики следующие:
Таблица 2 Техническая характеристика асинхронных двигателей с фазным ротором 4 МТ, 380 В, 50 Гц, ПВ=40%
| Тип двигателя
| Число полюсов
| Мощность
кВт
| Частота вращения об/мин
| I 1 ном
А
| E 2м
В
| I2 ном
A
А
| M max
Н*м
| J д
кг/
|
| 4МТ200 6
| 6
| 22
| 935
| 55
| 35
| 60
| 638
| 0.57
|



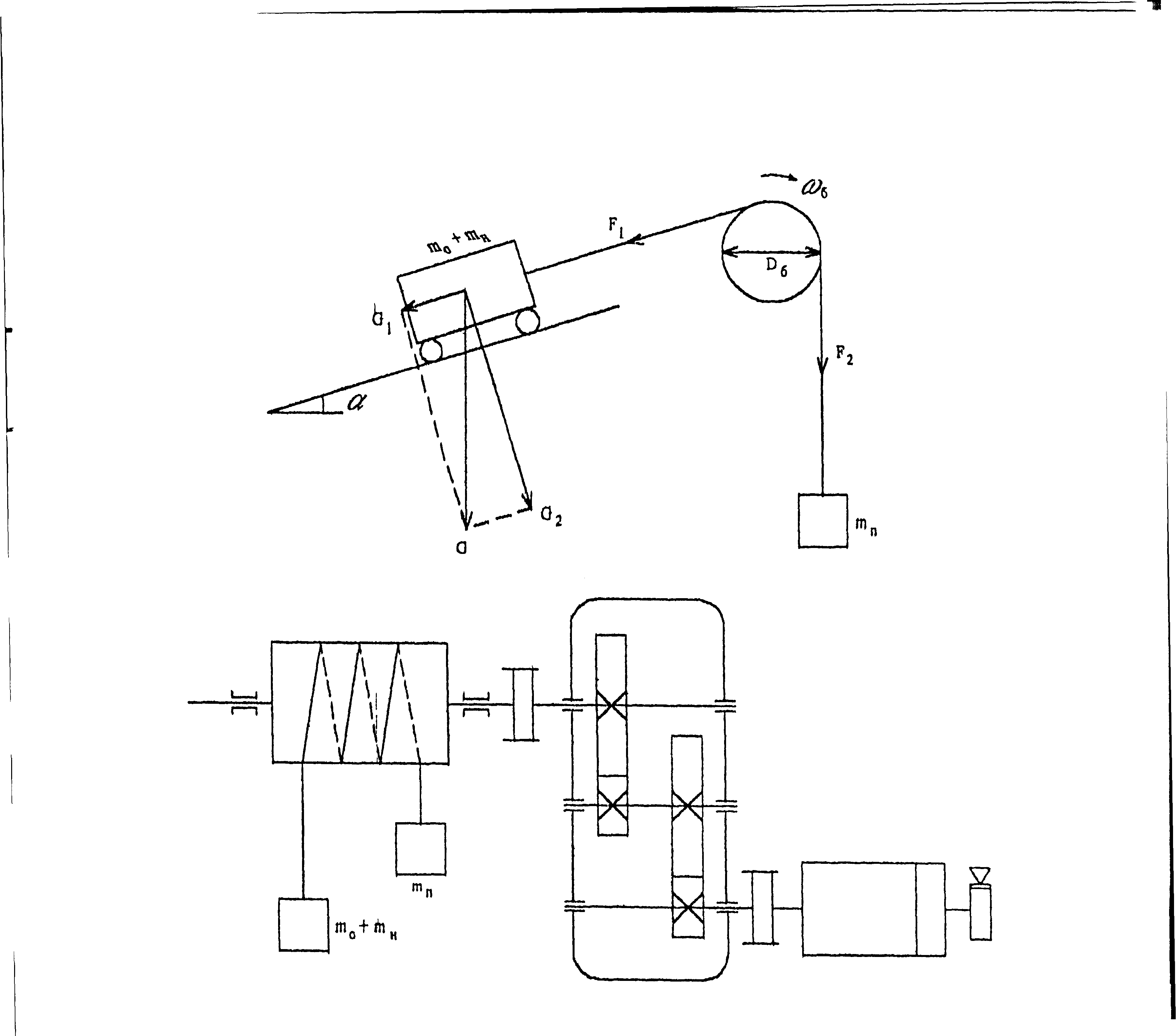 Рисунок 1 - Кинематическая схема электропривода
Рисунок 1 - Кинематическая схема электропривода
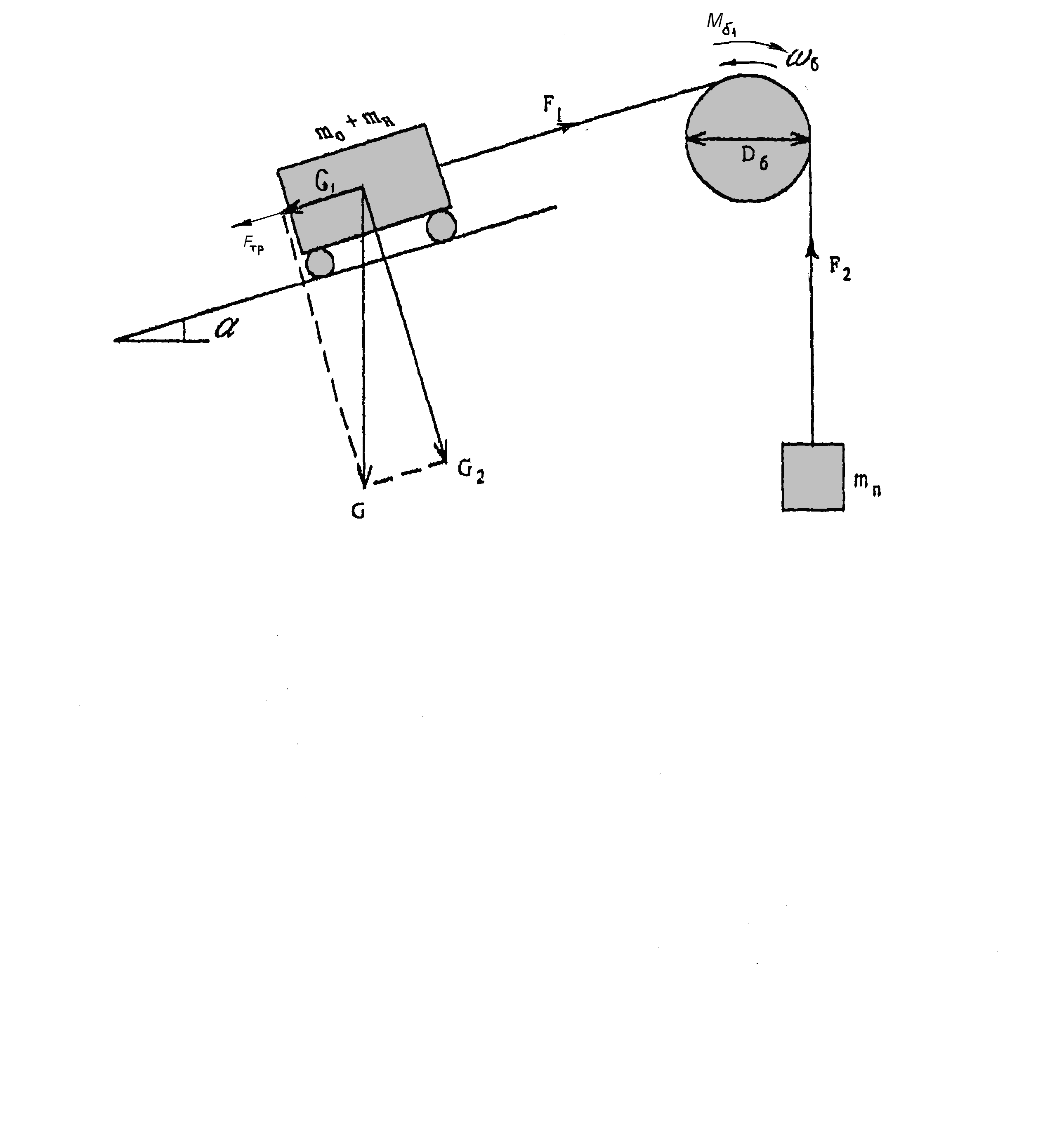 F1=G1+FTP
F2= gmn
Рисунок 2 - Кодъем груженой тележки.
F1=G1+FTP
F2= gmn
Рисунок 2 - Кодъем груженой тележки.
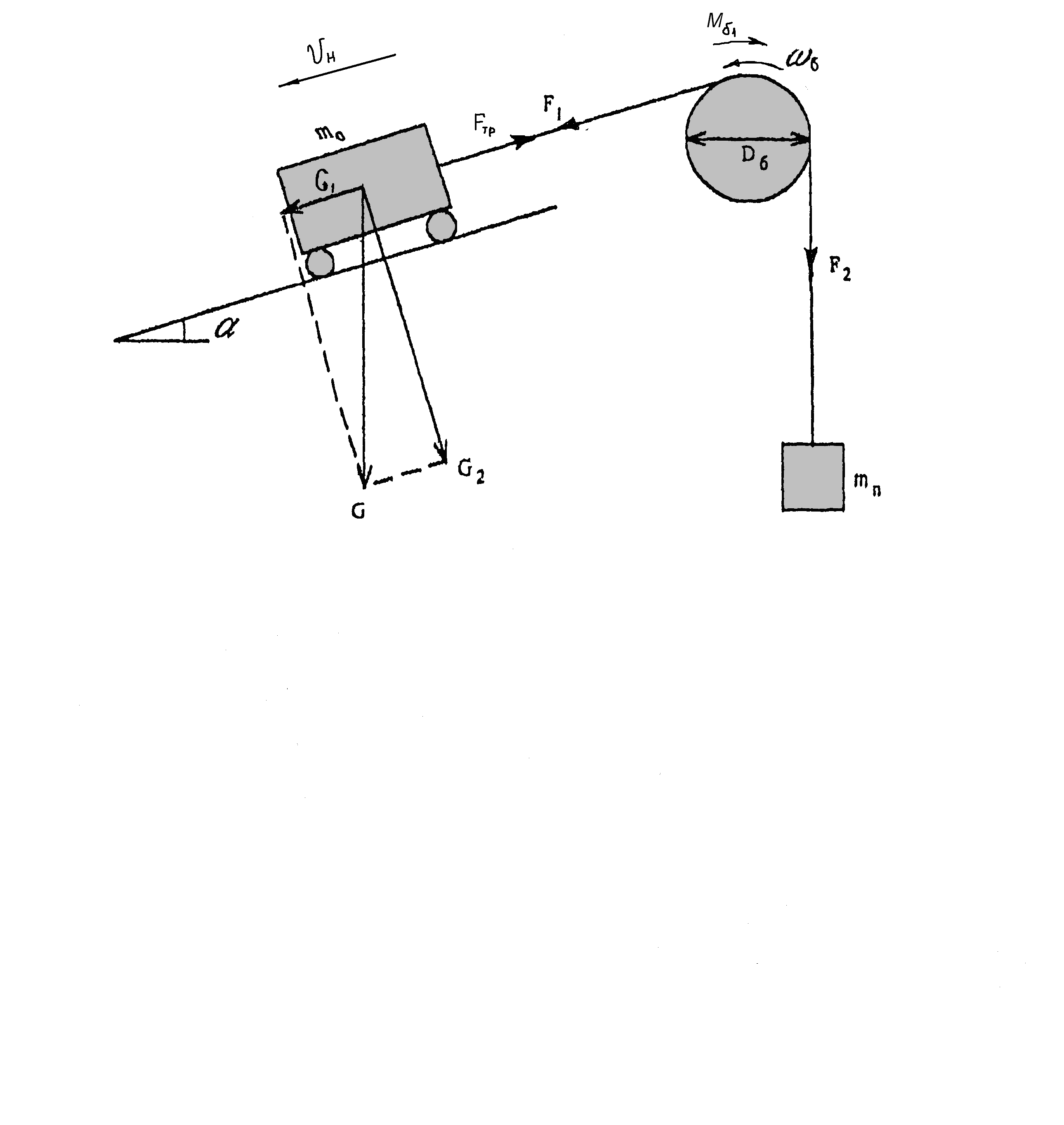 F1=G1 -FTP
F2=mn′g
Рисунок 3 - Спуск порожней тележки
F1=G1 -FTP
F2=mn′g
Рисунок 3 - Спуск порожней тележки
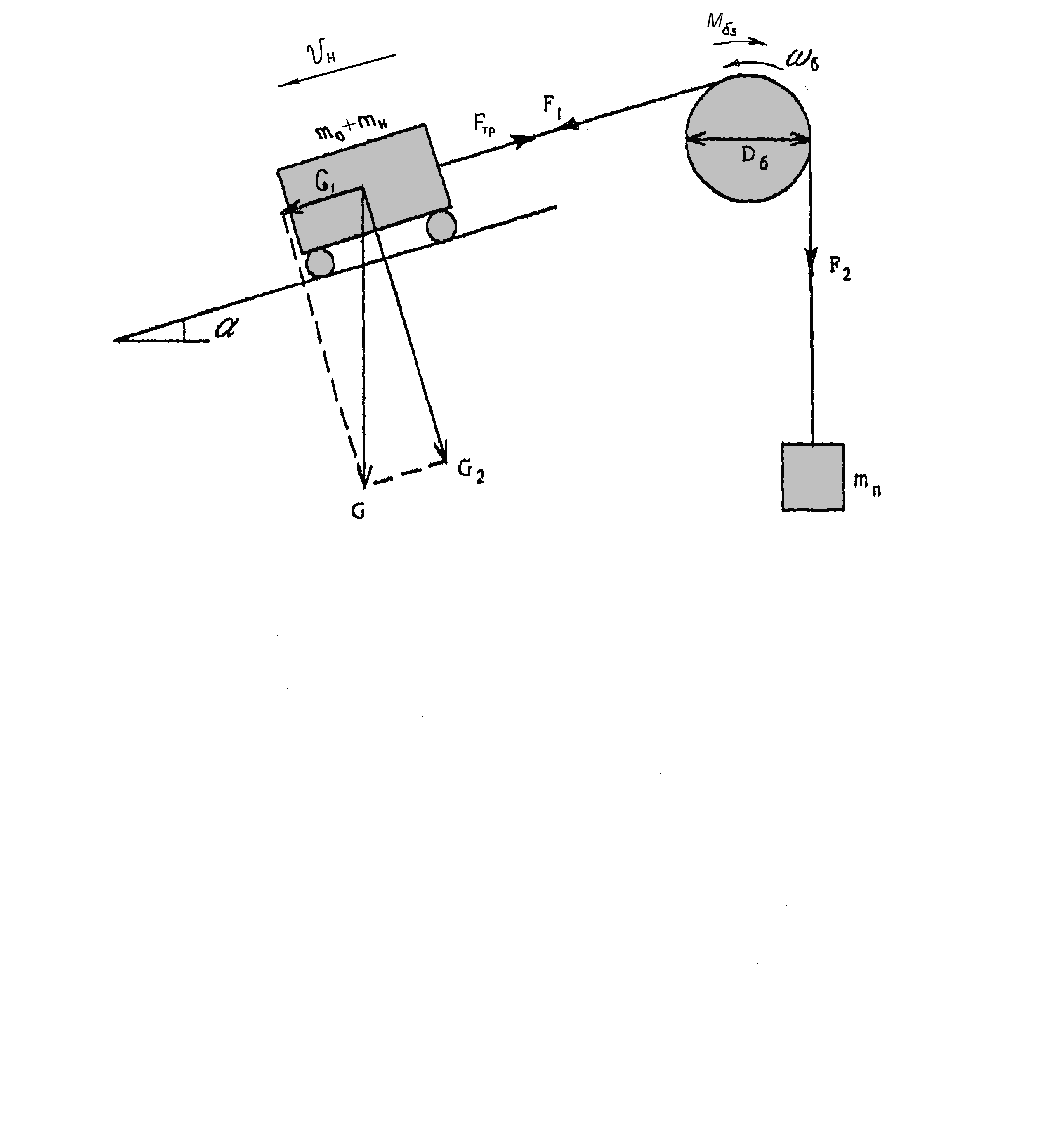 F1=G1 - FTP
F2= mng
F1=G1 - FTP
F2= mng


