Анализ предметной области. Выявление состава, структуры, и возможных состояний объекта
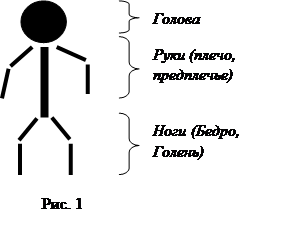
Физическая модель, движущегося в реальной жизни человека, очень трудна. У него много составных подвижных частей, который могут изменять свое положение в трех измерениях. При составлении математической модели, было принято решение выделить только основные части тела, характерные человеку. А так же ограничиться только двумя степенями свободы для вращающихся частей тела.
К вращающимся частям тела относятся руки, состоящие из плеч и предплечий, и ног состоящие соответственно из бедер и голеней. Они представляют собой отрезки с заданным началом (центром вращения), углом и длиной (более подробное описание составляющих встретится ниже). Так же в тело человека входят Голова, представленная окружностью, и туловище, отображаемое как прямая линия.
Класс голова
Голова представляет собой окружность некоторого радиуса с определенными координатами центра.
Класс Голова должна иметь:
Поля:
1. Радиус;
2. Центр;
И у нее должна быть следующая функция:
1. Функция рисования себя.
Класс человек
Как известно, у человека две руки и две ноги, каждые из которых состоят из двух связанных вращающихся частей тела (плечо и предплечье, бедро и голень). Итого таких частей всего 8. А так же голова, представленная отдельным классом, и туловище. В виду малой возложенной функциональности на туловище, было решено не выделять его как отдельный класс, а просто графически представить как элементарный отрезок.
Класс Человек состоит из:
Поля:
1. Координаты начальной точки туловища
2. Длина туловища
3. Цвет
4. Экземпляры класса Вращающаяся Часть Тела (8 шт.)
5. Экземпляр класса Голова
Функции: Рисование человека
Выбор и обоснование программного решения
Наша компонента наследуется от класса UserControl, который в свою очередь порождается от класса Control. Это означает, что мы имеем дело с элементом управления. UserControl предоставляет контекст графического устройства для рисования как Graphics.
Компонента наследуется от класса UserControl, но это не означает, что ее нельзя реализовать, унаследовав от другого класса. Например, можно воспользоваться готовым классом компоненты Component, содержащий «минимальный» интерфейс. Но данный класс не имеет собственного Graphics. То есть данный класс не может себя прорисовывать без помощи извне. А наш класс должен иметь пользовательский интерфейс (то есть являться визуальным).
Таким образом, можно заключить, что наследование от класса UserControl хоть и не является единственно верным путем к созданию компоненты, но в тоже время такой способ имеет право на существование.
Теперь перейдем непосредственно к разработке.
Наша компонента будет состоять из простейших геометрических фигур: окружностей и прямых.
Создаваемая компонента представляет собой класс, порождённый от UserControl и включающий в себя иерархию классов, показанную выше.
Добавление иконки к компоненте, описания к компоненте, добавление компоненты на Палитру элементов.
Добавление описания компоненты.
Чтобы добавить описание, нужно добавить следующий атрибут перед объявлением класса компоненты:
[Description («Двжущийся человек»)]
public partial class ManControl: UserControl // класс компоненты
Он будет виден в сплывающей подсказке, при наведении курсора на компонент в Панели компонентов.
Текст программы Rotary.cs
using System;
using System. Collections. Generic;
using System. Linq;
using System. Text;
using System. Drawing;
namespace ManComponent
{
enum RotateDir
{
ClockWise, // по часовой стрелки
CounterClockWise // против часовой стрелки
}
// класс описывающий вращающюся часть тела, относительно его центра
class Rotary
{
// ПОЛЯ
PointF pos; // начальная точка (центр вращения)
double angle; // угол
float length; // длина
double minAngle; // начальный угол
double maxAngle; // конечный угол – углы задают пределы вращения
public RotateDir dir; // положительное направление вращения
Rotary child; // другая вращ. часть тела, нач, точка которой совпадает с конечной
// стачичная переменая класса – «общая» для всех
static double da = Math.PI / 20d; // угловая скорость вращения
// СВОЙСТВА
public double MaxAngle {get {return maxAngle;} set {maxAngle = value;}}
public double MinAngle {get {return minAngle;} set {minAngle = value;}}
public double Angle
{
get {return angle;}
set
{ // преобразуем новый угол, если он отрицательный или больше чем 360 градусов
double a = value;
if (value >= 2 * Math.PI)
a = value – Math.PI * 2;
else if (value < 0)
a = 2 * Math.PI + value;
// если новый угол попадает в заданый диапозон (между min и max)
if (IsAbleToRotate(a))
{
angle = a;
UpdateChild();
return;
}
// если угол находится радом с границей заданного диапазона
else if (Math. Abs (maxAngle – value) < da)
angle = maxAngle;
else if (Math. Abs (minAngle – value) < da)
angle = minAngle;
UpdateChild();
}
}
public PointF Pos {get {return pos;}}
public PointF EndPoint {get {return new PointF (X + (float) Math. Cos(angle) * length, Y + (float) Math. Sin(angle) * length);}}
public float X {get {return pos.X;} set {pos.X = value;}}
public float Y {get {return pos.Y;} set {pos.Y = value;}}
// стачиное свойства да переменой da
public static double dAngle {get {return da;} set {if (value >= 0 && value < Math.PI * 2) da = value;}}
void Initialize (float x, float y, float len, int ang, RotateDir direction)
{
pos = new PointF((float) x, (float) y);
dir = direction;
angle = (double) ang/180d*Math.PI; length = len;
child = null;
minAngle = 0; maxAngle = 2 * Math.PI;
}
public Rotary (float x, float y, float len, int ang, RotateDir direction, Rotary ch)
{
Initialize (x, y, len, ang, direction);
child = ch;
child.dir = dir;
UpdateChild();
}
public Rotary (float x, float y, float len, int ang, RotateDir direction)
{
Initialize (x, y, len, ang, direction);
}
public Rotary (float len, int ang)
{
Initialize (0, 0, len, ang, RotateDir. ClockWise);
}
void UpdateChild()
{
if (child!= null)
{
child.X = X + (float) Math. Cos(angle) * length;
child.Y = Y + (float) Math. Sin(angle) * length;
}
}
public void Draw (Graphics g, Color color)
{
g. DrawLine (new Pen (color, 5), pos, EndPoint);
if (child!= null)
child. Draw (g, color);
g. FillEllipse (new SolidBrush(color), EndPoint.X-5f, EndPoint.Y -5f, 10,10);
}
bool IsAbleToRotate (double a)
{
double lb = minAngle; // нижняя граница
double ub = maxAngle; //
if (dir ==RotateDir. CounterClockWise)
{
ub = minAngle;
lb = maxAngle;
}
if (ub > lb)
if (a >= lb && a <= ub) return true;
else return false;
else if ((a >= lb && a < Math.PI * 2) || (a >= 0 && a < ub))
return true;
else return false;
}
public void SetRange (int min, int max)
{
minAngle = (double) min/180d*Math.PI;
maxAngle = (double) max/180d*Math.PI;
}
public void RotateUp() // вращать по направлению
{
if (dir == RotateDir. CounterClockWise)
Angle -= da;
else Angle += da;
}
public void RotateDown() // вращать против направления
{
if (dir == RotateDir. CounterClockWise)
Angle += da;
else Angle -= da;
}
}
Man.cs
using System;
using System. Collections. Generic;
using System. Linq;
using System. Text;
using System. Drawing;
namespace ManComponent
{
class Head
{
const int r = 25;
int x, y;
public Head (int X, int Y)
{
x = X; y = Y;
}
public void Draw (Graphics g, Color color) {g. FillEllipse (new SolidBrush(color), x-r/2, y-r/2, r, r);}
}
class Man
{
int x, y, len;
public Color color;
public Rotary lArm, lElbow, rArm, rElbow, lLeg, lKnee, rLeg, rKnee;
public Head head;
public Man (int X, int Y, int length)
{ // положение человечка центр головы, длина туловища
x = X; y = Y; len = length;
color = Color. Blue;
lElbow = new Rotary (30,90); // левый локоть(предплечее)
lElbow. SetRange (90,270);
lArm = new Rotary (x, y+length*0.2f, 30, 135, RotateDir. ClockWise, lElbow); // левая рука
lArm. SetRange (135,225);
lKnee = new Rotary (35, 90);
lKnee. SetRange (90, 180);
lLeg = new Rotary (x, y + len, 35, 135, RotateDir. ClockWise, lKnee);
lLeg. SetRange (125, 180);
rElbow = new Rotary (30, 90); // правый локоть
rElbow. SetRange (90,270);
rArm = new Rotary (x, y + length * 0.2f, 30, 45, RotateDir. CounterClockWise, rElbow); // правая рука
rArm. SetRange (45, 315);
rKnee = new Rotary (35, 90);
rKnee. SetRange (90, 0);
rLeg = new Rotary (x, y + len, 35,45, RotateDir. CounterClockWise, rKnee);
rLeg. SetRange (45, 0);
head = new Head (x, y);
}
public void Draw (Graphics g)
{
lArm. Draw (g, color); // левая рука
rArm. Draw (g, color); // правая рука
lLeg. Draw (g, color); // левая нога
rLeg. Draw (g, color); // правая нога
head. Draw (g, color); // голова
g. DrawLine (new Pen (color, 5), x, y, x, y + len);
}
}
ManControl.cs
using System;
using System. Collections. Generic;
using System. ComponentModel;
using System. Drawing;
using System. Data;
using System. Linq;
using System. Text;
using System. Windows. Forms;
namespace ManComponent
{
[ToolboxBitmap (typeof(ManControl), «Man.bmp»)]
[Description («Двжущийся человек»)]
public partial class ManControl: UserControl
Man man;
[Category («Движущийся человек»), Description («Угловая скорость»), Browsable(true)]
public double dAngle {get {return Rotary.dAngle;} set {if (value >= 0 && value < Math.PI * 2) Rotary.dAngle = value;}}
[Category («Движущийся человек»), Description («Цвет человека»), Browsable(true)]
public Color Color {get {return man.color;} set {man.color = value; Refresh();}}
public ManControl()
InitializeComponent();
man = new Man (Width/2,40,80);
Color = Color. Black;
}
private void ManControl_Paint (object sender, PaintEventArgs e)
{
man. Draw (this. CreateGraphics());
}
man.lArm. RotateUp();
man.lElbow. RotateUp();
Refresh();
}
public void GetLeftLegUp()
{
man.lLeg. RotateUp();
man.lKnee. RotateUp();
Refresh();
}
public void GetRigthLegUp()
{
man.rLeg. RotateUp();
man.rKnee. RotateUp();
Refresh();
}
public void GetRightArmUp()
{
man.rArm. RotateUp();
man.rElbow. RotateUp();
Refresh();
}
public void GetLeftArmDown()
{
man.lArm. RotateDown();
man.lElbow. RotateDown();
Refresh();
}
public void GetLeftLegDown()
{
man.lLeg. RotateDown();
man.lKnee. RotateDown();
Refresh();
}
public void GetRigthLegDown()
{
man.rLeg. RotateDown();
man.rKnee. RotateDown();
Refresh();
}
public void GetRightArmDown()
{
man.rArm. RotateDown();
man.rElbow. RotateDown();
Refresh();
}
}
}
Размещено на Allbest.ru
Анализ предметной области. Выявление состава, структуры, и возможных состояний объекта
Физическая модель, движущегося в реальной жизни человека, очень трудна. У него много составных подвижных частей, который могут изменять свое положение в трех измерениях. При составлении математической модели, было принято решение выделить только основные части тела, характерные человеку. А так же ограничиться только двумя степенями свободы для вращающихся частей тела.
К вращающимся частям тела относятся руки, состоящие из плеч и предплечий, и ног состоящие соответственно из бедер и голеней. Они представляют собой отрезки с заданным началом (центром вращения), углом и длиной (более подробное описание составляющих встретится ниже). Так же в тело человека входят Голова, представленная окружностью, и туловище, отображаемое как прямая линия.






