

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
При выполнении каждого полета экипаж обязан соблюдать следующие правила воздушной навигации:
- постоянно вести контроль за выдерживанием заданного режима полета
(скоростью, высотой, курсом), временем полета, остатком топлива;
- вести контроль и исправление пути по дальности и направлению;
- сохранять ориентировку в течение всего полета;
- использовать в комплексе все технические средства воздушной навигации в сочетании с визуальной ориентировкой, а также использовать СНС;
- соблюдать последовательность работы на этапе маршрута, установленного штурманским планом полета;
- периодически в соответствие с фактической обстановкой полета
производить определение навигационных элементов, своевременно выполнять коррекцию курсовых приборов (систем) и счисленных координат;
- вести требуемую документацию и применять бортовые средства
обьективного контроля (СОК);
Маршрутный полет выполняется в установленном порядке, включающем следующие этапы:
- взлет и выход на ИПМ или на ЛЗП;
- полет по ЛЗП;
- контроль и исправление пути;
- определение рубежа начала снижения;
- выход на КПМ;
- построение маневра для захода на посадку и выполнение посадки;
Перечисленные этапы тесно связаны между собой, каждый последующий этап является продолжением предыдущего. Их последовательное выполнение составляет порядок воздушной навигации. На каждом этапе экипаж выполняет определенные действия и использует различные технические средства воздушной навигации. На некоторых этапах воздушная навигация выполняется при переменных высотах и скоростях. Наиболее сложным и ответственным этапом воздушной навигации является выполнение маневра захода на посадку.
|
|
Способы и средства воздушной навигации по этапам полета экипаж должен выбирать в зависимости от аэронавигационной обстановки. Аэронавигационная обстановка – это комплекс условий выполнения полета, определяемых назначением, районом выполнения, высотой и скоростью полета, метеорологическими условиями, временем года и суток, характером пролетаемой местности, степенью оснащенности маршрута наземными техническими средствами, наличием и расположением запасных аэродромов и зон с особым режимом полета, наличием ограничений режима полета.
1. Взлет и выход на ИПМ или на ЛЗП: обычно в качестве ИПМ берут аэродром (посадочную площадку) вылета. Следовательно, маршрут полета, как правило, начинается непосредственно от аэродрома. В других случаях ИПМ может быть выбран характерный визуальный, радионавигационный ориентир, фиксированная точка, расположенная на некотором удалении от аэродрома. Контроль за выполнением маневра по выводу ВС на ИПМ экипаж осуществляет с помощью бортовых средств, а при видимости земли и визуально. Выход на ИПМ осуществляется по установленному маршруту, согласно документов АНИ. Выход на ИПМ необходимо выполнять с наибольшей точностью по месту и направлению, так как от этого зависит точность дальнейшего полета по линии заданного пути. Выход воздушного судна из района контролируемого аэродрома осуществляется по установленной схеме или по указаниям органа ОВД (рис. 1).
Выход на ЛЗП наиболее ответственный этап воздушной навигации. От точности определения курса следования зависит точность полета по заданному маршруту. Он заключается в определении такого курса следования, при выдерживании которого фактический путевой угол был бы равен заданному путевому углу или отличался от него не более чем на 2°.
В зависимости от навигационной обстановки курс следования может определяться одним из следующих способов:
1) по прогностическому или шаропилотному ветру;
|
|
2) по ветру, определенному в полете;
3) подбором по створу ориентиров или линейному ориентиру, лежащему
вдоль ЛЗП;
4) подбором курса по углу сноса;
5) по пеленгам наземных радиотехнических средств;
6) по бортовому или наземному радиолокаторам.
Если по условиям обстановки невозможно применить ни один из указанных способов, то выход на ЛЗП производится с курсом, равным ЗМПУ, а затем определяется боковое уклонение от ЛЗП и в зависимости от величины уклонения вносится поправка в курс. При отходе от ИПМ, а также от поворотных пунктов маршрута необходимо особенно тщательно контролировать правильность взятого направления полета.
Выход на ЛЗП по прогностическому ветру позволяет перед вылетом рассчитать курс полета по ЛЗП. Он применяется во всех случаях и положен в основу предполетного расчета полета. Экипаж по прогностическому ветру на высоте полета рассчитывает для каждого участка маршрута курс следования, путевую скорость и время полета. Данные расчета заносятся в бортовой журнал штурмана. После взлета полет от ИПМ выполняется с курсом следования, рассчитанным до вылета. Преимущества данного способа заключаются в том, что курс следования определяют заранее, что позволяет экипажу при выходе на ЛЗП больше внимания уделять ведению ориентировки и контролю пути. Недостаток этого способа – рассчитанный до вылета курс может быть не точным вследствие отличия прогностического ветра от расчетного.
Выход на ЛЗП расчетом курса по ветру, рассчитанному в полете. Для этого способа экипаж определяет на высоте полета ветер и по его данным рассчитывает курс следования на очередной участок маршрута.
Выход на ЛЗП подбором курса по створу ориентиров или линейному ориентиру. Способ применяют днем при хорошей видимости и наличии на ЛЗП характерных ориентиров. Курс следования подбирают полетом вдоль линейных ориентиров, двух - трех ориентиров, расположенных на ЛЗП или вблизи нее.
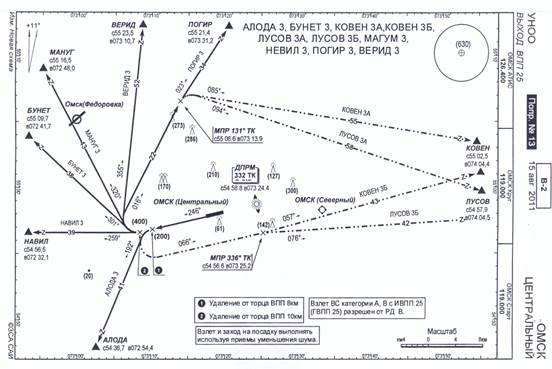 |
Рис. 1 Схема выхода аэродрома Омск-Центральный.
 |
Рис. 2 Схема выхода посадочной площадки «Калачинск».
2. Полет по ЛЗП, контроль и исправление пути.
На протяжении всего полета экипаж обязан выполнять следующие основные правила аэронавигации.
- Контроль выдерживания заданной траектории полета с периодичностью, необходимой для обеспечения требований к точности навигации. Собственно, основная цель навигации это и есть выдерживание заданной траектории, на это и должны быть направлены основные усилия навигатора. Разумеется, он не может заниматься этим непрерывно, как это иногда требуют в инструкциях и правилах. Ведь у пилота есть и другие обязанности, кроме навигации. Но он должен контролировать местоположение ВС настолько часто, чтобы ВС не вышло за допустимые пределы (например, ширину трассы или маршрута).
|
|
- Контроль курса следования. Курс является важнейшим навигационным элементом уже потому, что даже небольшая ошибка в курсе (например, из-за неверного учета угла сноса или отказа компаса) очень быстро приведет к уклонению ВС от линии заданного пути (ЛЗП).
- Определение навигационных элементов полета и ветра. Пилот должен знать не только где сейчаснаходится ВС и куда с какой скоростью оно движется, но и где оно будет находиться и как двигаться в будущем. А для этого нужно знать ветер в данном районе полета, а для его определения требуется измерить путевую скорость, угол сноса и т.д.
- Определение расчетного времени пролета поворотных пунктов маршрута (ППМ). Информация об этом времени нужна не только экипажу, но и диспетчеру УВД, который использует ее для предотвращения опасных сближений ВС друг с другом.
- Периодический контроль остатка топлива и уточнение рубежа ухода на запасной аэродром.
- Комплексное применение навигационных средств экипажем. Это одно из самых важных правил навигации, поэтому рассмотрим его подробнее. Одной из причин практически любого навигационного инцидента (уклонения от маршрута или потери ориентировки) является некомплексное применение навигационных средств экипажем. На заре авиации, когда навигационное оборудование ВС было примитивным (компас, часы, высотомер…), а ориентировка была исключительно визуальной, не было и речи о комплексном применении навигационных средств, поскольку таковых средств практически не было. Но, по мере совершенствования ВС, на борту стали устанавливать все больше навигационных приборов, позволяющих измерять и рассчитывать самые разные навигационные параметры. Появилась избыточностьнавигационной информации, поскольку один и тот же параметр можно было уже определить с помощью разных приборов или различными методами. Например, курс можно было определить и по гиромагнитному компасу, и по гирополукомпасу, да и, наконец, по КИ-13. Место ВС также можно определить и с помощью системы счисления пути, и по бортовому радиолокатору, и с помощью наземных радиомаяков различных видов. Казалось бы, избыточность информации – это хорошо. Но следует учитывать, что любое навигационное средство измеряет навигационные параметры не точно, а с погрешностями, которые носят случайный характер. Если компас показывает курс 100º, то на самом деле курс может быть и 98º, и 103º. У каждого прибора свои погрешности и при каждом измерении они имеют различные значения. В результате получается, что по одному из приборов определено линейное боковое уклонение (ЛБУ) +3 км, по другому +1 км, по третьему -2 км. А каково же значение ЛБУ на самом деле остается неизвестным. Таким образом, из-за наличия случайных погрешностей избыточность информации приводит к ее неопределенности.
|
|
Кроме того, навигационные средства могут отказатьвследствие их неисправности. Отказы могут быть явными, когда сразу видно, что прибор не работает. В этом случае пилот просто не будет его использовать, а обратится к другим, дублирующим навигационным средствам, с помощью которых можно измерить нужную ему навигационную величину. Такие явные отказыособой опасности не представляют. Но отказ может быть и неявным, когда прибор работает, показывает какое-то значение измеряемой величины, но из-за неисправности прибора это значение вовсе не соответствует действительности. Пилот же, не зная, что прибор неисправен, будет использовать показания прибора для навигации, что может привести к печальным последствиям. Наличие избыточности навигационной информации на борту позволяет с одной стороны уменьшить погрешности измерения навигационных параметров, а с другой – исключить возможность использования недостоверной навигационной информации. Для этого необходимо использовать показания не одного, а нескольких навигационных средств, сопоставляя измеренные значения. При этом нужно учитывать характеристики точности и надежности каждого из них, а также аэронавигационную обстановку. Ведь нельзя однозначно сказать, что данное средство точнее другого. Многое зависит от условий полета, удаления и расположения наземных радиомаяков и т.п.
Под комплексным применением навигационных средств понимают наиболее рациональное использование избыточной навигационной информации в целях обеспечения точной и безопасной навигации в условиях текущей аэронавигационной и метеорологической обстановки. В частности, комплексное применение навигационных средств включает в себя следующие элементы.
|
|
1) Своевременный выбор и правильное применение средств и методов навигации. Не существует какого-то одного самого точного средства навигации и самого лучшего способа его использования. Все зависит от аэронавигационной обстановки, условий полета, удаления радиомаяков и многих других факторов.
2) Контроль точности и достоверности используемой информации с помощью дублирующих навигационных средств. Никогда нельзя доверять только одному навигационному средству, даже самому точному. Всегда нужно проверять его показания с помощью других приборов.
3) Знание счисленных координат. Здесь не имеются в виду обязательно координаты, счисленные бортовой автоматизированной системой или полученные полной прокладкой. Речь идет о предварительном знании примерного района возможного местоположенияВС, прежде чем начать определять место ВС каким-либо способом. Хотя бы по времени полета от последнего ППМ и приблизительной путевой скорости пилот должен «прикинуть», где сейчас можетнаходиться ВС (с учетом возможных погрешностей скорости и курса), а где, соответственно, не может. Нарушение этого важного правила приводит к грубым и серьезным ошибкам.
4) Знание и учет меры точности и надежности используемых методов и средств навигации. Почти всегда бывает так, что одно средство показывает одно значение измеряемой величины (курса, ЛБУ и пр.), а другое средство – другое значение. Конечно, оба они не точны из-за случайных погрешностей измерений. А точность средства зависит не только от конструкции прибора, но и от многих других факторов: в каких-то условиях одно средство точнее, в других – другое. А если какое-то средство более точное, то оно обычно и более сложное, содержит больше конструктивных элементов. Но тогда и вероятность его отказа может быть выше, чем у более примитивного средства. Следовательно, навигатор знать характеристики точности и надежности разных способов навигации и от чего они зависят, чтобы правильно применять их в полете.
5) Прогнозирование координат ВС и периодическая коррекция погрешностей прогноза. Известна поговорка, что штурман должен лететь впереди ВС. То есть, навигатор должен не только знать, где ВС сейчаснаходится, но и где оно будет находиться в будущем. А когда это «будущее» наступило и выяснилось, где ВС оказался в этот момент на самом деле, навигатор должен оценить, на сколько он ошибся и выяснить причину ошибки, чтобы следующий прогноз был более точным.
Виды контроля пути. Чтобы ВС выполняло полет по заданной траектории, нужно прежде всего знать, где оно находится в данный момент времени. Контроль пути – это определение местоположения ВС относительно заданной траекторииполета.
Различают контроль пути по направлению, контроль пути по дальности и полный контроль пути.
Контроль пути по направлению. Цель этого вида контроля пути состоит в определении нахождения ВС относительно ЛЗП, путем сравнения фактического путевого угла и бокового уклонения от ЛЗП или наличия абсолютного значения и стороны линейно-бокового уклонения (ЛБУ). Особенно внимательно контроль пути по направлению должен осуществляться при отходе от ИПМ и ППМ, так как несвоевременное обнаружение погрешностей в расчете или выдерживании курса или неправильных показаний курсовых приборов может привести к потере ориентировки.
Элементы контроля пути по направлению. Для исправления пути может потребоваться определение таких величин, как линейное боковое уклонение (ЛБУ), боковое уклонение (БУ) и дополнительная поправка (ДП).

Рис. 3. Элементы контроля пути по направлению.
ЛБУ (cross-track error) является линейной величиной, представляющей собой расстояние от МС до ЛЗП (измеряется в километрах), а БУ и ДП являются угловыми величинами.
Боковое уклонение (track error) – это угол между направлением ЛЗП и направлением на ВС из начального ППМ участка (рис. 3).
Дополнительная поправка (closing error) – это угол между направлением ЛЗП и направлением от ВС на конечный ППМ участка.
ЛБУ, БУ и ДП имеют знак, совпадающий для всех трех величин. Они положительны, если ВС уклонилось вправо от ЛЗП и отрицательный – если влево. Очевидно, что если МС находится на ЛЗП, то ЛБУ=БУ=ДП=0.
Из рис. 3 легко видеть, что ЛБУ = Sпр · tgБУ; ЛБУ = Sост · tgДП.
На практике эти формулы могут быть реализованы на НЛ-10 с помощью ключей на рис.4.

Рис. 4. Определение ЛБУ, БУ и ДП на НЛ-10.
Для расчета в уме часто пользуются следующим простым, хотя и несколько приближенным правилом: на удалении 60 км каждый 1º БУ (или ДП) дает ЛБУ величиной 1 км.
Если удаление не 60, то этот же градус будет давать ЛБУ не в 1 км, а в столько раз больше, во сколько раз удаление превышает 60 км. Если же, наоборот, удаление 60 км, а градус не один, то и ЛБУ будет составлять столько километров, сколько градусов.

Рис. 5. Расчет линейного и бокового уклонения в уме.
Исправление пути с выходом в ППМ. Исправление пути - это действия по выводу ВС на заданную траекторию после того, как отклонение от нее обнаружено. Один из способов исправления пути заключается в расчете такого курса (например, магнитного), с которым ВС выйдет прямо в ППМ участка маршрута. Будем обозначать этот курс МКппм (его также чаще называют исправленным магнитным курсом – МКиспр). Предполагается, что БУ и ДП уже определены. Очевидно, что раз ВС уклонилось от ЛЗП, значит, курс, который выдерживал пилот, был неверным или неточным. Если, например, ВС уклонилось вправо, то понятно, что для возвращения на ЛЗП нужно довернуть влево, то есть уменьшить курс. Если изменить курс только на величину БУ, то ВС, конечно, больше уклоняться не будет. ВС будет просто лететь параллельно ЛЗП. А вот чтобы он вышел в ППМ, необходимо дополнительно кроме тогоизменить курс и на величину ДП. Кстати, по этой причине ДП и называется дополнительной поправкой.
Поэтому общая поправка в выдерживаемый курс (ПК) является суммой БУ и ДП: ПК = БУ + ДП.
Поскольку знаки БУ и ДП всегда одинаковы, то и ПК имеет такой же знак – при уклонении вправо плюс, а при уклонении влево – минус.
Рис.6. Поправка в курс.
Понятно, что при уклонении вправо (когда ПК с плюсом) для выхода в ППМ необходимо довернуть влево, то есть уменьшитьтекущий курс, а при уклонении влево - наоборот. Следовательно: МКппм (испр) = МК – ПК.
Также нужно помнить, что ПК – это поправка в курс. То есть величина, показывающая, на сколько градусов необходимо изменить тот неточный курс, с которым ВС летело и уклонилось.
Контроль пути по дальности это определение пройденного или оставшегося расстояния, то есть определение рубежа, которого достигло ВС к текущему моменту времени (Sпр и Sост). При контроле пути по дальности основное внимание уделяют точному определению путевой скорости, учету времени полета и выдерживанию заданной воздушной скорости.
Контроль пути по дальности и контроль пути по направлению различаются тем, чтоименно определяется (боковое уклонение или продольное расстояние), а не тем, с помощью чегоопределяются эти величины.
Полный контроль пути состоит в определении места ВС относительно заданного маршрута, требуемого направления и скорости полета для точного выхода в пункт назначения по месту и времени. Он является основным способом контроля пути и дает возможность судить о правильности выдерживания направления движения ВС в данный момент времени и о положении его по дальности.
В зависимости от навигационной обстановки и оборудования ВС место ВС может быть определено одним изследующих способов;
1) визуальной ориентировкой;
2) прокладкой пути по пройденному расстоянию и направлению полета от последнего достоверно пройденного ориентира;
3) прокладкой радиопеленгов от РНТ;
4) использованием бортового радиолокатора, навигационного
индикатора и систем навигации;
5) прокладкой астрономических линий положения;
6) получением места ВС от службы движения.
Для успешного ведения контроля пути необходимо все имеющиеся в распоряжении экипажа средства применять в комплексе. Это позволит надежно проверять точность полета ВС по заданному маршруту.
|
|
|

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!