L=V3 – пр-во геометрических векторов.
Утверждение. Базис в L образует любая система из трёх некомпланарных векторов.
Размерность L равна 3.
Док-во. Пусть S={a,b,c} некомпланарные векторы, что S линейно независима. Покажем, что S полна в L= V3, т.е. "вÎ V3 есть разложение по системе S: d=aa+bb+gc. Запишем векторы a, b, c, d через координаты в базисе {i,j,k}. a=(ax,ay,az), b=(bx,by,bz), c=(cx,cy,cz), d=(dx,dy,dz).
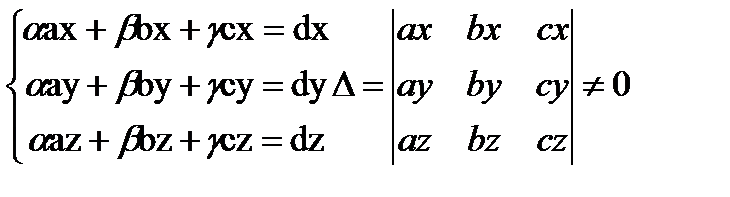
D<>0, т.к. векторы a, b, c не компланарны.
Система с не нулевым определителем имеет единственное решение, значит разложение существует.
Следствие. В пр-ве V3 любая система из 4 и более векторов линейно зависима.
L=Rn – арифметическое n-мерное пространство.
Утверждение. dim Rn =n; пример базиса в Rn даёт система S={e1,e2,…,en}, где e1=(1,0,…,0), e2=(0,1,0,…,0)… en=(0,0,…,1) канонический базис в Rn.
Док-во. Докажем полноту. "x=(x1,x2,…,xn)ÎRn имеем равентсво x=x1e1+x2e2+…+xnen. Действительно x=(x1,0,…,0)+(0,x2,…,0)+…+(0,0,…,xn)=x1(1,0,…,0)+x2(0,1,0,…,0)+…+xn(0,0,…,1)=x1e1+x2e2+…+xnen. Пусть 0=a1e1+a2e2+…+anen. Покажем, что все коэффициенты нули a1=an=0. Действительно 0=(0,0,…,0)=a1(1,0,…,0)+ a2(0,1,0,…,0)+…+an(0,0,…,1)=(a1,a2,…,an) => a1=a2=…= an=0. Вывод: S – линейно независима и полна, т.е. S – базис в Rn.
Следствие. Размерность Rn = n. В Rn любая система из m>=n+1 векторов линейно зависима.
L=Pn – пр-во многочленов степени не выше n.
L=Pn={p(t)=p0+p1t+…+pntn: pkÎR}
Утверждение. Размерность Pn=n+1, при этом пример базиса даёт система: S={1,t,…,tn}.
Док-во. "p(t)ÎPn имеем p(t)=p0+p1t+…+pntn – разложение по системе S с коэффициентами p0, p1,…, pn. "pÎPn имеем p(t)=p0e0(t)+p1e1(t)+…+pnen(t) разложение по системе S. Линейная независимость. Если a0e0(t)+a1e1(t) +…+anen(t)=0, т.е. a0+a1t+…+antn º 0, то покажем, что a0=a=…=an=0. Дифференцируем это множество n раз. Получаем a0=a1=…=an=0.
Пусть L – линейное пространство, МÌL, М – подпространство. Тогда само М является линейным пространством. Обозначим n=dimL, m=dimM.
Теорема. Размерность подпространства не выше размерности пространства. m<=n. Если m=n, то подпространство совпадает со всем пространством. Если m<n, то базис подпространства М можно достроить до базиса всего пространства L.
Док-во. Sm={e1,e2,…,em} – базисв М. Тогда Sm – линейно не зависимая система векторов из L и число векторов в Sm не больше, чем размерность L=n, т.е. m<=n. Пусть m=n, тогда базис Sm подпространства М будет линейно независимой системой векторов в L с числом векторов равным n=dimL, значит такая система образует базис в L, т.е. Sm базис в М и L. Следовательно, её линейная оболочка L(Sm)=L, т.к. Sm базис в L. Значит, в М=L. Пусть m<n, тогда базис Sn подпространства М будет линейно независимой системой векторов в L, но не базисом, значит Sm не полна в L, т.е. существует вектор em+1ÎL\L(sm). Добавим этот вектор в систему. Sm+1={e1,…,em,em+1}. Эта система линейно независима. Если m+1=n, то Sm+1, базис в L. Если m+a<n, то Sm+1 не полна в L и можно найти вектор em+2ÎL, em+2ÎL(Sm+1). Добавив его получим систему Sm+2={e1,…,em,em+1,em+2} (линейно независима). Если m+2=n, то Sm+2 базис в L. Продолжая построение в результате получим систему Sn линейно независимую, она и есть базис в L.
Рангом r(S) системы векторов S называется размерность её линейной оболочки: r(S)=dimL(S).
Базой (максимальной линейно независимой подсистемой) системы S называется её подсистема S` со свойствами:
1) S` - линейно независима;
2) все векторы из S линейно выражаются через векторы из S`.
Замечание. Если система S линейно независима, то она сама является своей базой.
Теорема. База системы векторов образует базис в её линейной оболочке.
Док-во. Пусть S – система векторов, S` - её база. Тогда S` линейно независима, любой вектор из L(S) линейно выражается через векторы из S, а они в свою очередь линейно выражаются через векторы системы S`. В итоге любой вектор xÎL(S) линено выражается через векторы из S`. Это означает, что S` полна в L(S), следовательно S` - базис в L(S).
Следствие. Все базы содержат одинаковое число векторов, равное рангу системы.
Следствие. Если S` линейно независимая подсистема системы S и число векторов в S` равно рангу S, то S` - база системы.
Замечание. Если система линейно независима, то размерность её линейной оболочки (её ранг) равен числу векторов в ней, т.к. она сама является своей базой.
Пусть L – линейное пространство, S={e1,…,ek}, S1={f1,…,fm} – системы векторов из L.
Теорема. Если все векторы из S1 линейно выражаются через векторы из S, то ранг системы S1 не больше, чем ранг S (r(S1)<=r(S)).
Док-во. Покажем, что L(S1)ÌL(S). Для "xÎL(S1) есть линейное выражение этого вектора через векторы из S1. Но они линейно выражаются через векторы из S. В итоге получаем линейное выражение вектора xÎL(S1) через векторы из S, т.е. xÎL(S). Доказали, что если xÎL(S1), то xÎL(S). L(S) – линейное пространство, L(S1) – подпространство => dimL(s1)<=dimL(S), r(S1)<=r(S).
Элементарными преобразованиями системы векторов преобразования вида:
1) перестановка двух векторов в системе;
2) умножение одного из векторов системы на число не равное нулю;
3) добавление к одному из векторов другого с некоторым коэффициентом.
Замечание. Если одна система получена из другой с помощью элементарных преобразований, то и та в свою очередь получается из новой с помощью обратных элементарных преобразований.
Теорема. Если одна система получена из другой с помощью элементарных преобразований, то их ранг одинаков.
Док-во. Если S1 получена из S элементарными преобразованиями, то векторы из S1 линейно выражаются через векторы из S. r(S1)<=r(S). В свою очередь векторы из S выражаются через векторы из S1 с помощью обратных элементарных преобразований, значит r(S)<=r(S1). Значит r(S)=r(S1).
Замечание. При элементарных преобразованиях база системы может исчезнуть.
Вектора
Вектор – это направленный прямолинейный отрезок, т.е. отрезок, имеющий определённую длину и определённое направление.
Длиной вектора называется длина отрезка.
Вектор, длина которого равна нулю, называется нулевым вектором.
Вектор, длина которого равна единице, называется единичным вектором.
Векторы a и b называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Два вектора называются равными, если они коллинеарны, одинаково направлены и имеют одинаковые длины.
Три вектора в пространстве называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
Вектор, соединяющий начало одного вектора с концом другого вектора называется суммой этих векторов.
Под разностью векторов a и b понимается вектор c=a-b такой, что b+c=a.
Произведением вектора a на скаляр l называется вектор lа, который имеет длину |l|*|a|, коллинеарен вектору а, имеет направление вектора а, если l>0 и противоположное, если l<0.
Линейные операции над векторами обладают следующими свойствами:
1) a+b=b+a;
2) (a+b)+c=a+(b+c);
3) l1(l2*a)= l1*l2*a;
4) (l1+l2)*a=l1*a+l2*a;
5) l(a+b)= la+lb.
Проекцией точки М на ось l называется основание М1 перпендикуляра ММ1, опущенного из точки на ось.
Проекцией вектора на AB ось l называется положительное число |AB|, если вектор A1B1 и ось l одинаково направлены и отрицательное число, если вектор А1В1 и ось l противоположно направлены.
Св-ва.
1. Проекция вектора а на ось l равна произведению модуля вектора а на косинус угла j между вектором и осью, т.е. прla=|a|*cosj.
Следствие. Проекция вектора на ось положительна(отрицательна), если вектор образует с осью острый(тупой) угол, и равна нулю, если этот угол – прямой.
Следствие. Проекции равных векторов на одну и ту же ось равны между собой.
2. Проекция суммы нескольких векторов на одну и ту же ось равна сумме их проекций на эту ось.
3. При умножении вектора а на число l его проекция на ось также умножается на это число.
Таким образом, линейные операции над векторами приводят к соответствующим линейным операциям над проекциями этих векторов.
a=ax*I+ay*j+az*k. Эта формула является основной в векторном исчислении и называется разложением вектора по ортам координатных осей. Числа ax, ay, az называются координатами вектора a, т.е. координаты вектора есть его проекции на соответствующие координатные оси.
|a|=Ö(ax2+ay2+az2), т.е. модуль вектора равен квадратному корню из суммы квадратов его проекций на оси координат.
cos2a+ cos2b+ cos2g=1, т.е. сумма квадратов направляющих косинусов ненулевого вектора равна единице.
Скалярным произведением двух ненулевых векторов a и b называется число, равное произведению длин этих векторов на косинус угла между ними.
Св-ва.
1) ab=ba;
2) (la)b=l(ab);
3) a(b+c)=ab+ac;
4) a2=|a|2;
5) если векторы a и b (ненулевые) взаимно перпендикулярны, то их скалярное произведение равно нулю.
a*b=axbx+ayby+azbz. Скалярное произведение векторов равно сумме произведений их одноимённых координат.
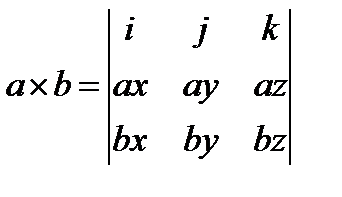
Векторным произведением вектора а на вектор b называется вектор с, который:
1) перпендикулярен векторам а и b;
2) имеет длину, численно равную площади параллелограмма, построенного на векторах a и b как на сторонах, т.е. |c|=|a|*|b|*sinj, где j угол между векторами а и b;
3) векторы a, b и c образуют правую тройку.
Св-ва.
1. При перестановке сомножителей векторное произведение меняет знак.
2. l(axb)=(la)xb=ax(lb).
3. Два не нулевых вектора a и b коллинеарны тогда и только тогда, когда их векторное произведение равно нулевому вектору.
4. (a+b)xc=axc+bxc.
Смешанное произведение представляет собой число.
Св-ва.
1. (axb)c=(bxc)a=(cxa)b.
2. (axb)c=a(bxc).
3. Смешанное произведение меняет свой знак при перемене мест любых двух векторов-сомножителей, т.е. abc=-acb.
4. Смешанное произведение ненулевых векторов a, b и с равно нулю тогда и только тогда, когда они компланарны.