Применение СПЦ четвертого поколения позволяет реализовать следующий способ электромагнитного перемешивания металлических расплавов, предназначенный для использования в тех случаях, когда в процессе плавки изменяется вязкость расплава (например, в результате изменения химического состава расплава при добавлении легирующих добавок, охлаждении металла и т.д.).
Сущность способа заключается в следующем [20].
Известен способ электромагнитного перемешивания для непрерывного литья металла, при котором с целью увеличения интенсивности перемешивания жидкого металла в его массиве создается одна или более вихревых зон, смещенных относительно центральной оси разливки, положение которых в пространстве непрерывно варьируется за счет непрерывного циклического изменения схемы подключения обмоток индукторов к источнику многофазного напряжения [26].
Недостатком этого способа является то, что при его использовании в процессе перемешивания не изменяются количество создаваемых в массиве жидкого металла вихревых зон и их геометрические размеры, что обуславливает недостаточную интенсивность перемешивания жидкого металла.
Наиболее близким к предлагаемому является способ перемешивания жидкого металла, при котором за счет применения секторного управления индуктором, имеющим число фаз более пяти, для повышения интенсивности перемешивания жидкого металла в его массиве встречно-направленными магнитными полями создаются вихревые зоны, количество, конфигурация, положение в пространстве и геометрические размеры которых непрерывно изменяется [18].
Недостатком этого способа является снижение интенсивности перемешивания жидкого металла при повышении его вязкости в процессе кристаллизации или при изменении химического состава металла.
Задачей предлагаемого способа является повышение интенсивности перемешивания жидкого металла при увеличении его вязкости в процессе кристаллизации или при изменении его химического состава.
Достигается это тем, что в процессе электромагнитного перемешивания жидкого металла индуктором, имеющим число фаз  , генерируется одно бегущие магнитное поле или четное количество встречно-направленных бегущих магнитных полей, которые создают силы, действующие на частицы металла, в результате чего в массиве жидкого металла образуется одна вихревая зона или четное количество встречно-вращающихся вихревых зон, количество которых, геометрические размеры и положение в пространстве непрерывно изменяются.
, генерируется одно бегущие магнитное поле или четное количество встречно-направленных бегущих магнитных полей, которые создают силы, действующие на частицы металла, в результате чего в массиве жидкого металла образуется одна вихревая зона или четное количество встречно-вращающихся вихревых зон, количество которых, геометрические размеры и положение в пространстве непрерывно изменяются.
По отношению к прототипу у предлагаемого способа имеются следующие отличительные признаки. Согласно изобретению, в процессе электромагнитного перемешивания при повышении динамической вязкости жидкого металла увеличивают в целое число раз фазовые смещения между напряжениями соседних фаз индуктора и уменьшают максимальное количество встречно-направленных бегущих магнитных полей в соответствии с соотношениями


где  – целое число раз, в которое увеличиваются фазовые смещения;
– целое число раз, в которое увеличиваются фазовые смещения;  максимальное количество встречно-направленных бегущих магнитных полей;
максимальное количество встречно-направленных бегущих магнитных полей;  динамическая вязкость жидкого металла. При этом повышается количество сонаправленных бегущих магнитных полей и число пар полюсов образуемого ими результирующего магнитного поля, вследствие чего увеличиваются силы, действующие на частицы металла.
динамическая вязкость жидкого металла. При этом повышается количество сонаправленных бегущих магнитных полей и число пар полюсов образуемого ими результирующего магнитного поля, вследствие чего увеличиваются силы, действующие на частицы металла.
Это объясняется тем, что при увеличении в раз фазовых смещений между фазными напряжениями соседних фаз индуктора и уменьшении максимального числа  встречно-направленных бегущих магнитных полей в соответствии с соотношениями
встречно-направленных бегущих магнитных полей в соответствии с соотношениями  и
и  в раз увеличивается количество сонаправленных бегущих магнитных полей, каждое из которых имеет свою пару магнитных полюсов. Таким образом, при увеличении в раз указанных фазовых смещений происходит увеличение в такое же число раз количества пар полюсов результирующего бегущего магнитного поля, генерируемое индуктором и образующегося в результате наложения указанных выше сонаправленных бегущих магнитных полей.
в раз увеличивается количество сонаправленных бегущих магнитных полей, каждое из которых имеет свою пару магнитных полюсов. Таким образом, при увеличении в раз указанных фазовых смещений происходит увеличение в такое же число раз количества пар полюсов результирующего бегущего магнитного поля, генерируемое индуктором и образующегося в результате наложения указанных выше сонаправленных бегущих магнитных полей.
В совокупности индуктор и массив жидкого металла представляют собой один из вариантов реализации обобщенной асинхронной машины, в которой в качестве статора асинхронной машины выступает индуктор, а в качестве ротора – массив жидкого металла. В асинхронных машинах сила, приводящая в движение ротор, пропорциональна числу пар полюсов машины, т. е. числу пар полюсов магнитного поля, создаваемого статором.
Поскольку при увеличении в раз фазовых смещений между фазными напряжения соседних фаз индуктора происходит возрастание в  раз числа пар полюсов результирующего бегущего магнитного поля, генерируемого индуктором, то при этом одновременно происходит и увеличение во столько же раз сил, действующих на частицы жидкого металла и приводящих их в движение.
раз числа пар полюсов результирующего бегущего магнитного поля, генерируемого индуктором, то при этом одновременно происходит и увеличение во столько же раз сил, действующих на частицы жидкого металла и приводящих их в движение.
Изложенная сущность поясняется графически.
На рис. 3.1 приведена обобщенная функциональная схема подключения фазных обмоток индуктора 1 магнитогидродинамической системы, предназначенной для электромагнитного перемешивания жидкого металла, к трехфазной сети переменного тока 2 через выпрямитель 3 и  -фазный автономный инвертор 4, где a, b, c, …, z
-фазный автономный инвертор 4, где a, b, c, …, z  фазы инвертора и индуктора. Управление инвертором 4 осуществляется системой управления 5 за счет формирования управляющих сигналов. Параметры сигналов формируются системой управления 5 в зависимости от величины динамической вязкости
фазы инвертора и индуктора. Управление инвертором 4 осуществляется системой управления 5 за счет формирования управляющих сигналов. Параметры сигналов формируются системой управления 5 в зависимости от величины динамической вязкости  жидкого металла, определяемой по выходному сигналу датчика вязкости 6, установленного на индукторе 1.
жидкого металла, определяемой по выходному сигналу датчика вязкости 6, установленного на индукторе 1.
На рис. 3.2 показаны условные обозначения, использующиеся на диаграммах, приведенных на рис. 3.3-3.6, где 1 – индуктор; 7 – направление движения бегущего магнитного поля, генерируемого индуктором, и сектор, занимаемый им в пространстве; 8 – массив жидкого металла; 9 – вихревая зона; 10 – вектор, характеризующий направление от одного магнитного полюса к другому в одном отдельно взятом бегущем магнитном поле с одной парой полюсов, а количество этих векторов в зоне действия результирующего бегущего магнитного поля, образованного наложением двух или более указанных полей при совпадении их направлений движения, равно числу пар полюсов данного результирующего поля; a, b, c, d, e, f – фазные обмотки индуктора.
На рис. 3.3-3.6 представлены пространственные диаграммы, характеризующие количество, геометрические размеры и расположение в массиве
Фиг. 1
Рис. 3.1

Рис. 3.2
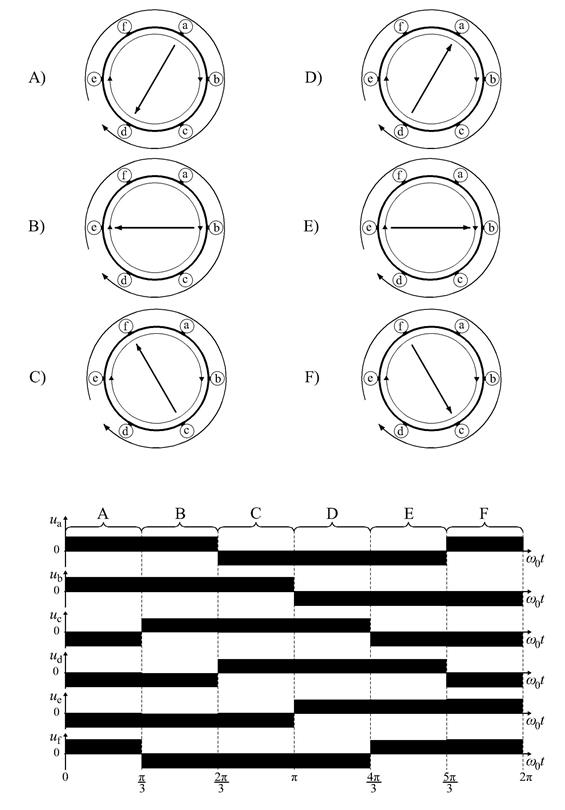
Рис. 3.3

Рис. 3.4

Рис. 3.5

Рис. 3.6
жидкого металла вихревых зон, а также перемещение и расположение в пространстве магнитных полюсов бегущих магнитных полей, создаваемых индуктором. Приведены временные диаграммы системы фазных напряжений индуктора, при которых обеспечиваются указанные выше пространственные диаграммы, где  – фазные напряжения индуктора;
– фазные напряжения индуктора;  – выходная частота фазных напряжений;
– выходная частота фазных напряжений;  – время. Буквами A, B, C, D, E, F обозначены временные интервалы, в течение которых не происходит изменений в системе фазных напряжений инвертора, а также соответствующие им названные выше пространственные диаграммы бегущих магнитных полей и вихревых зон в массиве жидкого металла.
– время. Буквами A, B, C, D, E, F обозначены временные интервалы, в течение которых не происходит изменений в системе фазных напряжений инвертора, а также соответствующие им названные выше пространственные диаграммы бегущих магнитных полей и вихревых зон в массиве жидкого металла.
Сущность способа заключается в следующем.
При подключении многофазного индуктора 1, имеющего число фаз  к трехфазной сети переменного тока 2 через выпрямитель 3 и
к трехфазной сети переменного тока 2 через выпрямитель 3 и  -фазный автономный инвертор напряжения 4, по сигналам, поступающим от системы управления 5, инвертором 4 формируется система выходных фазных напряжений инвертора, являющихся одновременно и фазными напряжениями индуктора. Формирование этой системы осуществляется на основе выходного сигнала датчика вязкости 6.
-фазный автономный инвертор напряжения 4, по сигналам, поступающим от системы управления 5, инвертором 4 формируется система выходных фазных напряжений инвертора, являющихся одновременно и фазными напряжениями индуктора. Формирование этой системы осуществляется на основе выходного сигнала датчика вязкости 6.
При питании этой системой напряжений  -фазного индуктора 1 генерируется одно бегущее магнитное поле 7 (рис. 3.3) или четное количество встречно-направленных бегущих магнитных полей 7 (рис. 3.4), создающих силы, действующие на частицы металла и приводящие их в движение, в результате чего в массиве жидкого металла 8 образуется одна вихревая зона 9 (рис. 3.3) или четное количество встречно-вращающихся вихревых зон 9 (рис. 3.4) и, тем самым, осуществляется перемешивание жидкого металла.
-фазного индуктора 1 генерируется одно бегущее магнитное поле 7 (рис. 3.3) или четное количество встречно-направленных бегущих магнитных полей 7 (рис. 3.4), создающих силы, действующие на частицы металла и приводящие их в движение, в результате чего в массиве жидкого металла 8 образуется одна вихревая зона 9 (рис. 3.3) или четное количество встречно-вращающихся вихревых зон 9 (рис. 3.4) и, тем самым, осуществляется перемешивание жидкого металла.
Равномерность распределения компонентов жидкого металла по его массиву 8 обеспечивается за счет непрерывного изменения в процессе электромагнитного перемешивания количества вихревых зон, их геометрических размеров (рис. 3.3 и рис. 3.4) и положения в пространстве (рис. 3.4 и рис. 3.5), что достигается путем изменения количества, конфигурации и расположения в пространстве бегущих магнитных полей 7, создаваемых индуктором 1.
При увеличении динамической вязкости  жидкого металла происходит изменение выходного сигнала датчика вязкости 6, в результате чего системой управления 5 изменяется система выходных напряжений инвертора 4 таким образом, что фазовые смещения между напряжениями соседних фаз индуктора 1 увеличивается в
жидкого металла происходит изменение выходного сигнала датчика вязкости 6, в результате чего системой управления 5 изменяется система выходных напряжений инвертора 4 таким образом, что фазовые смещения между напряжениями соседних фаз индуктора 1 увеличивается в  раз и уменьшается максимальное количество встречно-направленных бегущих магнитных полей 7 (рис. 3.6), генерируемых индуктором 1, равное количеству встречно-вращающихся вихревых зон 9 (рис. 3.6), возникающих в массиве жидкого металла 8, в соответствии с соотношениями
раз и уменьшается максимальное количество встречно-направленных бегущих магнитных полей 7 (рис. 3.6), генерируемых индуктором 1, равное количеству встречно-вращающихся вихревых зон 9 (рис. 3.6), возникающих в массиве жидкого металла 8, в соответствии с соотношениями  и
и  . При этом происходит увеличение в раз числа сонаправленных бегущих магнитных полей 7 (рис. 3.6), а, следовательно, и увеличение числа пар полюсов результирующего бегущего магнитного поля, равного количеству векторов 10, что приводит к увеличению в раз сил действующих на частицы жидкого металла, и в итоге, к возрастанию интенсивности электромагнитного перемешивания.
. При этом происходит увеличение в раз числа сонаправленных бегущих магнитных полей 7 (рис. 3.6), а, следовательно, и увеличение числа пар полюсов результирующего бегущего магнитного поля, равного количеству векторов 10, что приводит к увеличению в раз сил действующих на частицы жидкого металла, и в итоге, к возрастанию интенсивности электромагнитного перемешивания.
Пример конкретной реализации.
В качестве примера рассматривается процесс электромагнитного перемешивания жидкого металла, находящегося в емкости, имеющей в сечении форму круга. При этом индуктором 1, имеющим число фаз  , за счет изменения с помощью системы управления 5 варианта системы выходных напряжений инвертора 4 в массиве жидкого металла 8 генерируются одно бегущие магнитное поле 7 (рис. 3.3) или два встречно-направленных бегущих магнитных поля 7 (рис. 3.4), каждое из которых имеет одну пару полюсов, создающих силы, действующие на частицы металла и приводящие их в движение, в результате чего в массиве жидкого металла образуются соответственно одна вихревая зона 9 (рис. 3.3) или две встречно-вращающихся вихревых зоны 9 (рис. 3.4). Непрерывное изменение варианта системы выходных напряжений инвертора 4 позволяет непрерывно менять в массиве жидкого металла 8 количество вихревых зон 9 с одной на две и обратно (рис. 3.3 и рис. 3.4), а за счет этого – повысить интенсивность электромагнитного перемешивания во всех точках внутри массива металла 8 по сравнению со случаем, когда вариант системы выходных напряжений инвертора 4 в процессе перемешивания не изменяется.
, за счет изменения с помощью системы управления 5 варианта системы выходных напряжений инвертора 4 в массиве жидкого металла 8 генерируются одно бегущие магнитное поле 7 (рис. 3.3) или два встречно-направленных бегущих магнитных поля 7 (рис. 3.4), каждое из которых имеет одну пару полюсов, создающих силы, действующие на частицы металла и приводящие их в движение, в результате чего в массиве жидкого металла образуются соответственно одна вихревая зона 9 (рис. 3.3) или две встречно-вращающихся вихревых зоны 9 (рис. 3.4). Непрерывное изменение варианта системы выходных напряжений инвертора 4 позволяет непрерывно менять в массиве жидкого металла 8 количество вихревых зон 9 с одной на две и обратно (рис. 3.3 и рис. 3.4), а за счет этого – повысить интенсивность электромагнитного перемешивания во всех точках внутри массива металла 8 по сравнению со случаем, когда вариант системы выходных напряжений инвертора 4 в процессе перемешивания не изменяется.
Кроме того, с той же целью за счет изменения системы выходных напряжений инвертора 4 с варианта, показанного на рис. 3.4, на вариант, показанный на рис. 3.5, осуществляется изменение положения в пространстве вихревых зон, образующихся в массиве жидкого металла.
При увеличении динамической вязкости жидкого металла происходит изменение выходного сигнала датчика вязкости 6, в результате чего системой управления 5 изменяется система выходных напряжений инвертора (рис. 3.6) таким образом, что фазовые смещения между напряжениями соседних фаз индуктора 1 увеличиваются в 2 раза, т.е.  , а количество встречно-направленных бегущих магнитных полей 7 и количество встречно-вращающихся вихревых зон 9 уменьшаются в 2 раза, т.е. с двух (рис. 3.4) до одного (рис. 3.6).
, а количество встречно-направленных бегущих магнитных полей 7 и количество встречно-вращающихся вихревых зон 9 уменьшаются в 2 раза, т.е. с двух (рис. 3.4) до одного (рис. 3.6).
При этом при переходе от варианта системы выходных напряжений инвертора 4, показанного на рис. 3.3, к варианту системы выходных напряжений, показанному на фиг. 6, количество сонаправленных бегущих магнитных полей 7 увеличивается в 2 раза и становится равным двум, а, следовательно, возрастает вдвое и число пар полюсов генерируемого индуктором 1 результирующего бегущего магнитного поля, равное количеству векторов 10, что приводит к повышению в 2 раза сил, действующих на частицы жидкого металла и в итоге к возрастанию интенсивности его электромагнитного перемешивания.
При этом соотношения (1) и (2) выполняются.
Заявленный способ обеспечивает возможность электромагнитного перемешивания жидкого металла при повышении динамической вязкости путем повышения сил, действующих на частицы жидкого металла.







