Исходные данные
Мощность на валу при номинальном режиме………………………Рн=185кВт
Скорость движения при номинальном режиме……………………. Vн=43,5 км/ч
Индуктивность обмоток двигателя……………………………. Lд=0.029 Гн
Алгоритм управления и функциональная схема системы автоматического пуска поезда
электропоезд реостат двигатель тяговой
Система автоматического пуска электропоезда представляет собой замкнутую многоканальную ступенчатую систему автоматического регулирования тока ТЭД, в которых используется принцип регулирования по отклонению.
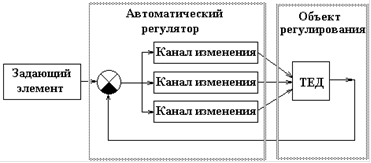
Рис. 2.1.Укрупненная функциональная схема системы
В процессе разгона поезда по мере увеличения скорости его движения происходит постепенное уменьшение тока I тяговых двигателей. При снижении тока до заданной величины Iу, подается управляющее воздействие, которое приводит к увеличению тока тяговых двигателей. После того, как ток опять снизиться до величины Iу, подается следующее управляющее воздействие, ток опять возрастает и.т.д.
Таблица алгоритма управления электропоездом
Таблица 2.1. Алгоритм управления электропоездом
| Соединение ТЭД
| Позиции РК
| Контакторы
| Сопротивления пусковых резисторов
|
|
|
| Линейные
|
Реостатные
| Переходные
| Мостовые
| Ослаб. Возб уждения
|
|
|
|
| ЛК-1
| ЛК-2
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
| 12
| П1-2
| М
| Ш1-2
|
|
| Последовательное
| 1
| +
| +
|
|
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 9,09
|
|
| 2
| +
| +
| +
|
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 7,10
|
|
| 3
| +
| +
| +
| +
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 6,15
|
|
| 4
| +
| +
| +
| +
| +
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 5,30
|
|
| 5
| +
| +
|
| +
| +
| +
|
|
| +
| +
|
|
|
|
|
| +
|
| 4,55
|
|
| 6
| +
| +
|
|
| +
| +
| +
|
| +
| +
|
|
|
|
|
| +
|
| 2,55
|
|
| 7
| +
| +
|
|
|
| +
| +
| +
| +
| +
|
|
|
|
|
| +
|
| 1,61
|
|
| 8
| +
| +
|
|
|
|
| +
| +
| +
| +
| +
|
|
|
|
| +
|
| 0,75
|
|
| 9
| +
| +
|
|
|
|
|
| +
| +
| +
| +
| +
|
|
|
| +
|
| 0,00
|
|
| 10
| +
| +
|
|
|
|
|
|
|
| +
| +
| +
|
|
|
| +
| +
| 0,00
|
|
| 11
| +
| +
|
|
|
|
|
|
|
|
| +
| +
| +
| +
|
| +
| +
| 0,00
|
| Последовательно - параллеьное
| 12
| +
| +
|
|
|
|
|
|
|
|
| +
| +
| +
| +
| +
|
| +
| 9,09
|
|
| 13
| +
| +
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
| +
|
|
| 5,11
|
|
| 14
| +
| +
| +
| +
| +
| +
|
|
|
|
| +
| +
|
|
| +
|
|
| 3,22
|
|
| 15
| +
| +
|
|
| +
| +
| +
| +
|
|
| +
| +
|
|
| +
|
|
| 1,51
|
|
| 16
| +
| +
|
|
|
|
| +
| +
| +
| +
| +
| +
|
|
| +
|
|
| 0,00
|
|
| 17
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
|
|
| +
|
| +
| 0,00
|
|
| 18
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
|
|
| +
|
| +
| 0,00
|
Силовая схема и схема управления
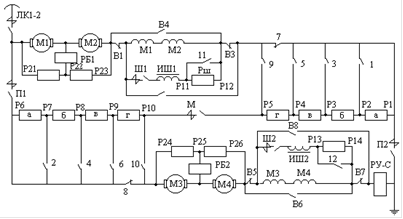
Рис. 2.2.Упрощенная силовая схема моторного вагона
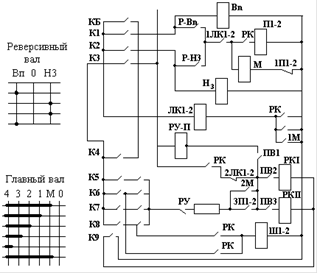
Рис. 2.3.Упрощенная схема цепей управления
Статические характеристики ТЭД и сопротивления пускового реостата
Расчет номинального тока двигателя
для расчета характеристик двигателя в первую очередь необходимо определить номинальное значение тока. Для расчета номинального тока, номинальное напряжение на ТЭД принимаем Uдн=1500 В, а КПД ТЭД h=0.9, тогда:
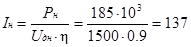 А. (3.1.)
А. (3.1.)
3.2 Расчетная таблица и график скоростных характеристик ТЭД
Чтобы получить конкретные характеристики двигателя заданной мощности, необходимы относительные выражения координат универсальных характеристик умножить на заданные номинальные величины. Результаты расчетов представим в таблице 3.1.
Таблица 3.1.Универсальные характеристики тягового двигателя
| Ток двигателя
| 110
| 137
| 178
| 219
| 274
| 301
|
| Позиция
| Скорость движения
|
| 1
| 9,1
| 3,5
| -2,2
| -
| -
| -
|
| 2
| 12,2
| 7,0
| 2,2
| -2,2
| -
| -
|
| 3
| 15,2
| 10,9
| 6,5
| 3,0
| -1,3
| -
|
| 4
| 17,0
| 12,6
| 8,7
| 5,7
| 2,2
| -
|
| 5
| 18,3
| 14,4
| 10,4
| 7,8
| 4,8
| -
|
| 6
| 19,6
| 16,1
| 12,6
| 10,4
| 7,8
| -
|
| 7
| 20,9
| 17,8
| 14,8
| 12,6
| 10,4
| -
|
| 8
| 22,2
| 19,1
| 16,5
| 14,8
| 12,6
| -
|
| 9
| 23,5
| 20,9
| 18,3
| 16,5
| 14,8
| -
|
| 10
| 28,7
| 24,8
| 21,8
| 19,6
| 17,4
| -
|
| 11
| 35,2
| 28,7
| 24,8
| 22,2
| 19,6
| -
|
| 12
| 44,8
| 34,8
| 24,8
| 17,0
| 7,4
| -
|
| 13
| 40,5
| 33,5
| 27,8
| 23,1
| 17,4
| -
|
| 14
| 43,5
| 37,0
| 32,2
| 27,8
| 23,5
| -
|
| 15
| 46,1
| 40,5
| 35,7
| 32,2
| 28,3
| -
|
| 16
| 48,7
| 43,5
| 39,6
| 36,5
| 33,5
| -
|
| 17
| -
| 50,9
| 45,7
| 41,8
| 38,7
| -
|
| 18
| -
| -
| 51,8
| 47,4
| 43,1
| 41,3
|
По данным таблицы построим график зависимости V=¦(I)
Сопротивление секций реостата
| Секция
| а
| б
| в
| г
|
| Rс (Ом)
| 1,99
| 0,95
| 0,85
| 0,75
|
После построения скоростных характеристик можно заполнить колонку R в таблице 1.1.
Из графика Рис. 3.1. определяем величину R, так же как и определяли величины сопротивления R1, и заполняем графу R в таблицу 1.1.
Исходная пусковая диаграмма и последовательность работы системы управления электропоездом
Исходная пусковая диаграмма
На графике скоростных характеристик изображаем исходную пусковую диаграмму тонкими линиями.
 А. (4.1.)
А. (4.1.)
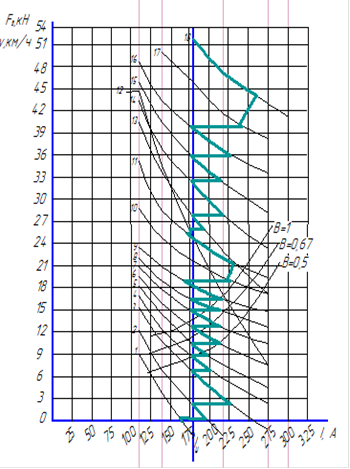
Рисунок 1 - скоростная и тяговая характеристика
Таблица последовательности работы системы управления электропоездом во времени
Таблица 4.1. Последовательность работы системы управления электропоездом во времени
| Характеристики тока
| Такт
| Срабатывание аппаратов или процесс изменения тока в силовой цепи
| Длительность (с)
| Наименование выходного элемента аппарата
| Цепь подачи воздействия
| Исполнение
| DV км ч.
| V км ч.
| I А.
|
|
|
|
|
|
|
| Цепи управления
| Силовые цепи
|
|
|
|
|
| 0
| Исходное состояние
| -
| -
| -
| КБ, К1, К3-К9, Р-ВП, РК1, РУ, РК1-8, ПВ2,1П1-2,2ЛК1-2
| В1, В3, В5, В7,7,8,11,12
| 0
| 0
| 0
|
| 1
| 1
| Включение ЛК1-2
| 0.08
| ЛК1-2
| К3, К4, КБ, РК1, К9
| 1ЛК1-2, 2ЛК1-2
| ЛК1-2
| 0
| 0
| 0
|
|
| 2
| Включение М
| 0.08
| М
| К3, К4,1ЛК1-2, КБ, К1, Р-ВП 1ЛК1-2, 1П1-2, К9
| 1М, 2М
| М
| 0
| 0
| 165
|
|
| 3
| Переключение РК
| 0.35
| РК1
| К3, К5, РК1-8, 2М, ПВ2
| РУ, РУ1, ПВ2, ПВ3, РК2-18, РУ
| 1,11,12
| 0,3
| 0,3
| 163
|
| 1-2
| 4
| Переход
| -
| -
| -
| -
| -
| 0
| 0,3
| 195
|
| 2
| 5
| Задержка
| 3,22
| -
| -
| -
| -
| 1,9
| 2,2
| 178
|
|
| 6
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 7
| Переключение.РК
| 0.35
| РК11
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ3, ПВ2 РУ
| 2
| 0,2
| 2,4
| 176
|
| 2-3
| 8
| Переход
| -
| -
| -
| -
| -
| 0
| 2,4
| 227
|
| 3
| 9
| Задержка
| 6,95
| -
| -
| -
| -
| 4,1
| 6,5
| 178
|
|
| 10
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 11
| Переключение.РК
| 0.35
| РК1
| К3, К5, РК1-8, 2М, ПВ2
| РУ, ПВ2, ПВ3 РУ
| 3
| 0,2
| 6,7
| 176
|
| 3-4
| 12
| Переход
| -
| -
| -
| -
| -
| 0
| 6,7
| 203
|
| 4
| 13
| Задержка
| 3,39
| -
| -
| -
| -
| 2
| 8,7
| 178
|
|
| 14
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 15
| Переключение.РК
| 0.35
| РК11
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ2, ПВ3 РУ
| 4,1
| 0,2
| 8,9
| 176
|
| 4-5
| 16
| Переход
| -
| -
| -
| -
| -
| 0
| 8,9
| 198
|
| 5
| 17
| Задержка
| 2,54
| -
| -
| -
| -
| 1,5
| 10,4
| 178
|
|
| 18
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 19
| Переключение.РК
| 0.35
| РК1
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ2, ПВ3 РУ
| 5,2
| 0,2
| 10,6
| 176
|
| 5-6
| 20
| Переход
| -
| -
| -
| -
| -
| 0
| 10,6
| 215
|
| 6
| 21
| Задержка
| 3,39
| -
| -
| -
| -
| 2
| 12,6
| 178
|
|
| 22
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 23
| Переключение.РК
| 0.35
| РК11
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ2, ПВ3 РУ
| 6,3
| 0,2
| 12,8
| 176
|
| 6-7
| 24
| Переход
| -
| -
| -
| -
| -
| 0
| 12,8
| 215
|
| 7
| 25
| Задержка
| 3,39
| -
| -
| -
| -
| 2
| 14,8
| 178
|
|
| 26
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 27
| Переключение.РК
| 0.35
| РК1
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ2, ПВ3 РУ
| 9,4
| 0,2
| 15
| 176
|
| 7-8
| 28
| Переход
| -
| -
| -
| -
| -
| 0
| 15
| 216
|
| 8
| 29
| Задержка
| 2,54
| -
| -
| -
| -
| 1,5
| 16,5
| 178
|
|
| 30
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 31
| Переключение.РК
| 0.35
| РК11
| К3, К5, РК1-8, 2М, ПВ3
| РУ, ПВ2, ПВ3 РУ
| 10,5
| 0,2
| 16,7
| 176
|
| 8-9
| 32
| Переход
| -
| -
| -
| -
| -
| 0
| 16,7
| 218
|
| 9
| 33
| Задержка
| 2,71
| -
| -
| -
| -
| 1,6
| 18,3
| 178
|
|
| 34
| Отпускание РУ
| 0.04
| РУ-С
| Силовая цепь
| РУ
| -
|
|
|
|
|
| 35
| Переключение.РК 9-10
| 0.35
| РК1
| К3, К5, РК9-10, 12-15,2М, ПВ3
| ПВ2, ПВ3, РК10-12
| 6,7
| 0,2
| 18,5
| 176
|
|
| 36
| Включение Ш1-2
| 0.8
| Ш1-2
| К3, К6, РК9-10, К9
| -
| Ш1-2
| 0,5
| 19
| 168
|
| 9-10
| 37
| Переход и переключение. РК 10-11
| -
| РК11
| К3, К6, РК9-10,12-15, РУ, 2М, ПВ3
| -
| -
| 0
| 19
| 226
|
| 10
| 38
| Переключение 10-11
| 0.35
| РК11
| К3, К6, РК9-10,12-15, РУ, 2М, ПВ3
| ПВ3, ПВ2, РУ, РК11
| 11,12,8
| 0,2
| 19,2
| 224
|
| 10-11
| 39
| Переход
| -
| -
| -
| -
| -
| 2,1
| 21,3
| 230
|
| 11
| 40
| Задержка
| 5,93
| -
| -
| -
| -
| 3,5
| 24,8
| 178
|
Таблица переходных процессов
| t
| 0
| t
| 2t
| 3t
|
 00.6320.8650.95-1 00.6320.8650.95-1
|
|
|
|
|
Таблица 9.1. Расчет переходных процессов при регулировании возбуждения
| переход
| tв
| Tэп
| DVэп
| Ia
| Iб
| I в
| Iг
|
| 9-10
| 0,015
| 0,046
| 0,027
| 168
| 189
| 202
| 226
|
| 10-11
| 0,014
| 0,043
| 0,025
| 224
| 226
| 228
| 230
|
| 16-17
| 0,009
| 0,026
| 0,015
| 176
| -
| -
| 241
|
| 17-18
| 0,008
| 0,024
| 0,014
| 239
| -
| -
| 260
|
 с. (9.1.)
с. (9.1.)
Iн=137А.
Список использованной литературы
1. Методические указания к курсовому проекту по дисциплине «Теория автоматического управления». - Самара: СамГУПС, - 2011 г. - 32 с.
2. Савоськин А.Н. Автоматизация электроподвижного состава. М.: Транспорт, 1990. - 216 с.
Исходные данные
Мощность на валу при номинальном режиме………………………Рн=185кВт
Скорость движения при номинальном режиме……………………. Vн=43,5 км/ч
Индуктивность обмоток двигателя……………………………. Lд=0.029 Гн
Алгоритм управления и функциональная схема системы автоматического пуска поезда
электропоезд реостат двигатель тяговой
Система автоматического пуска электропоезда представляет собой замкнутую многоканальную ступенчатую систему автоматического регулирования тока ТЭД, в которых используется принцип регулирования по отклонению.
Рис. 2.1.Укрупненная функциональная схема системы
В процессе разгона поезда по мере увеличения скорости его движения происходит постепенное уменьшение тока I тяговых двигателей. При снижении тока до заданной величины Iу, подается управляющее воздействие, которое приводит к увеличению тока тяговых двигателей. После того, как ток опять снизиться до величины Iу, подается следующее управляющее воздействие, ток опять возрастает и.т.д.
Таблица алгоритма управления электропоездом
Таблица 2.1. Алгоритм управления электропоездом
| Соединение ТЭД
| Позиции РК
| Контакторы
| Сопротивления пусковых резисторов
|
|
|
| Линейные
|
Реостатные
| Переходные
| Мостовые
| Ослаб. Возб уждения
|
|
|
|
| ЛК-1
| ЛК-2
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
| 12
| П1-2
| М
| Ш1-2
|
|
| Последовательное
| 1
| +
| +
|
|
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 9,09
|
|
| 2
| +
| +
| +
|
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 7,10
|
|
| 3
| +
| +
| +
| +
|
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 6,15
|
|
| 4
| +
| +
| +
| +
| +
|
|
|
| +
| +
|
|
|
|
|
| +
|
| 5,30
|
|
| 5
| +
| +
|
| +
| +
| +
|
|
| +
| +
|
|
|
|
|
| +
|
| 4,55
|
|
| 6
| +
| +
|
|
| +
| +
| +
|
| +
| +
|
|
|
|
|
| +
|
| 2,55
|
|
| 7
| +
| +
|
|
|
| +
| +
| +
| +
| +
|
|
|
|
|
| +
|
| 1,61
|
|
| 8
| +
| +
|
|
|
|
| +
| +
| +
| +
| +
|
|
|
|
| +
|
| 0,75
|
|
| 9
| +
| +
|
|
|
|
|
| +
| +
| +
| +
| +
|
|
|
| +
|
| 0,00
|
|
| 10
| +
| +
|
|
|
|
|
|
|
| +
| +
| +
|
|
|
| +
| +
| 0,00
|
|
| 11
| +
| +
|
|
|
|
|
|
|
|
| +
| +
| +
| +
|
| +
| +
| 0,00
|
| Последовательно - параллеьное
| 12
| +
| +
|
|
|
|
|
|
|
|
| +
| +
| +
| +
| +
|
| +
| 9,09
|
|
| 13
| +
| +
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
| +
|
|
| 5,11
|
|
| 14
| +
| +
| +
| +
| +
| +
|
|
|
|
| +
| +
|
|
| +
|
|
| 3,22
|
|
| 15
| +
| +
|
|
| +
| +
| +
| +
|
|
| +
| +
|
|
| +
|
|
| 1,51
|
|
| 16
| +
| +
|
|
|
|
| +
| +
| +
| +
| +
| +
|
|
| +
|
|
| 0,00
|
|
| 17
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
|
|
| +
|
| +
| 0,00
|
|
| 18
| +
| +
|
|
|
|
|
|
| +
| +
| +
| +
|
|
| +
|
| +
| 0,00
|






