Блок «Рулевое управление»

| Блок «Рулевое управление» может заставлять вашего робота двигаться вперед, назад, поворачиваться или останавливаться. Вы можете регулировать рулевое управление, чтобы заставить вашего робота идти прямо, двигаться по дуге или делать резкие повороты. Используйте блок «Рулевое управление» для роботизированных транспортных средств, в которых имеются два больших мотора, где один мотор управляет левой стороной транспортного средства, а второй мотор управляет правой стороной. Блок «Рулевое управление» управляет обоими моторами одновременно, чтобы ваше транспортное средство двигалось в выбранном вами направлении.
|

 Левый мотор
Левый мотор
 Правый мотор
Правый мотор
Советы и подсказки
Роботизированные транспортные средства с двумя приводными моторами также могут управляться блоком «Независимое управление моторами». Блок «Независимое управление моторами» аналогичен блоку «Рулевое управление», но имеет другой способ управления оборотами.
Выберите свои порты мотора и режим управления
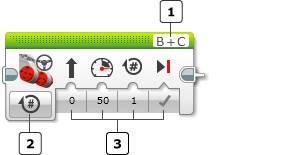
Выбор порта
Выбор режима
 Вводы
Вводы
Выберите предпочитаемые вами два мотора (A, B, C или D), которые будут управляться блоком «Рулевое управление» при помощи выбора порта вверху блока. Нажмите на каждую букву мотора, чтобы выбрать порт мотора. Первый порт должен быть для мотора с левой стороны транспортного средства, а второй порт должен быть для мотора с правой стороны.
Советы и подсказки
Убедитесь, что в вашем роботе, направленном вперед, мотор с левой стороны – это первый мотор, указанный в перечне выбора порта. В противном случае, ваш робот будет поворачиваться в неверном направлении.
Используйте выбор режима для выбора предпочитаемого вами типа управления моторами. После выбора режима вы можете выбрать значения вводов. Доступные вводы будут меняться в зависимости от режима. Режимы и вводы описаны ниже.
Режимы: Включить, Выключить, Включить на количество секунд, Включить на количество градусов, Включить на количество оборотов
Режимы
Включить

В режиме «Включить» происходит включение обоих моторов, затем происходит немедленный переход в следующий блок программы. Вы можете управлять скоростью и направлением моторов при помощи вводов «Мощность» и «Рулевое управление». Моторы будут работать, пока их не остановят или позднее не заменят другим блоком в программе, или пока программа не закончиться.
Используемые вводы: Мощность, Рулевое управление
Пример

Используйте режим «Включить», когда хотите, чтобы другие блоки в вашей программе управляли продолжительностью включения моторов. В данной программе робот движется вперед. Когда нажимается датчик касания, робот останавливается.
Выключить

В режиме «Выключить» происходит выключение обоих моторов. Используйте режим «Выключить» для остановки робота, который был запущен в режиме «Включить» ранее в программе. См. пример выше.
Если ввод «Тормозить в конце» установлен на «Истина», моторы немедленно останавливаются. Моторы будут удерживаться в остановленном положении, пока другой блок перемещения или мотора не запустит их, или пока программа не закончится. Если ввод «Тормозить в конце» установлен на «Ложь», питание моторов просто отключается. Моторы будут двигаться по инерции, используя любую остаточную движущую силу, пока не остановятся, или пока не запустится другой блок перемещения или мотора.
Используемые вводы: Тормозить в конце
Пример

Данная программа заставит робота двигаться прямо вперед с полной мощностью в течение 2 секунд, а затем остановит.
Советы и подсказки
Вы можете использовать десятичную точку во вводе «Секунды» для получения точного количества времени, например, 3,5 для трех с половиной секунд и 0,25 секунд для четверти секунды.
Пример 1

Программа ниже заставит робота двигаться прямо вперед с мощностью 75%, пока моторы не сделают поворот на 900 градусов (два с половиной оборота), а затем остановит.
Советы и подсказки
Расстояние, которое пройдет ваш робот, зависит от ввода «Градусы». Однако расстояние также зависит от диаметра используемых приводных колес и прочих физических факторов. Встроенные датчики оборотов в моторах измеряют количество оборотов в ступицах мотора.
Если ввод «Рулевое управление» не нуль, ход одного из моторов будет замедлен или изменен на обратный для обеспечения поворота робота. В таком случае ввод «Градусы» будет измеряться на моторе, который вращается быстрее.
Пример 2

Данная программа заставит робота делать повороты по дуге вправо, используя значение «Рулевое управление» мощности от 25 до 50%. Поворот будет продолжаться, пока левый мотор (наружный и более быстрый) не сделает поворот ровно на 1000 градусов, затем робот остановится.
Советы и подсказки
Учтите, что ввод «Градусы» измеряет количество вращений более быстрого мотора, а не изменяет направление робота при повороте. Изменение направления робота зависит от диаметра колес, расстояния между сдвоенными колесами и прочих факторов.
Советы и подсказки
Если ввод «Рулевое управление» не нуль, ход одного из моторов будет замедлен или изменен на обратный для обеспечения поворота робота. В таком случае ввод «Обороты» будет измеряться на моторе, который вращается быстрее.
Пример

Данная программа заставит робота двигаться прямо вперед с мощностью 50%, пока моторы не сделают поворот на 3 полных оборота. Затем она заставит двигаться прямо назад (при помощи отрицательного числа для «Мощность») для 3 оборотов и остановит там, где была запущена.
Советы и подсказки
Режим «Включить на количество оборотов» точно такой же, как и режим «Включить на количество градусов», за исключение того, что в нем используется другая единица вращения. Вы также можете использовать десятичную точку во вводе «Обороты» для получения частей оборота. В следующих примерах представлены два различных способа получения одинакового количества оборотов:
| Обороты
| Градусы
|
| 1
| 360
|
| 2
| 720
|
| 0,5
| 180
|
| 1,25
| 450
|
| 7,2
| 2592
|
Советы и подсказки
Скорость вращения мотора примерно пропорциональна указанному уровню мощности, хотя на скорость вращения также влияет размер применяемой к мотору нагрузки.
Советы и подсказки
Для прямого управления уровнем мощности, используемым обоими моторами, вы можете использовать блок «Независимое управление моторами» вместо блока «Рулевое управление».
Блок «Рулевое управление»
|
| Блок «Рулевое управление» может заставлять вашего робота двигаться вперед, назад, поворачиваться или останавливаться. Вы можете регулировать рулевое управление, чтобы заставить вашего робота идти прямо, двигаться по дуге или делать резкие повороты. Используйте блок «Рулевое управление» для роботизированных транспортных средств, в которых имеются два больших мотора, где один мотор управляет левой стороной транспортного средства, а второй мотор управляет правой стороной. Блок «Рулевое управление» управляет обоими моторами одновременно, чтобы ваше транспортное средство двигалось в выбранном вами направлении.
|
Левый мотор
Правый мотор
Советы и подсказки
Роботизированные транспортные средства с двумя приводными моторами также могут управляться блоком «Независимое управление моторами». Блок «Независимое управление моторами» аналогичен блоку «Рулевое управление», но имеет другой способ управления оборотами.
Выберите свои порты мотора и режим управления
Выбор порта
Выбор режима
Вводы
Выберите предпочитаемые вами два мотора (A, B, C или D), которые будут управляться блоком «Рулевое управление» при помощи выбора порта вверху блока. Нажмите на каждую букву мотора, чтобы выбрать порт мотора. Первый порт должен быть для мотора с левой стороны транспортного средства, а второй порт должен быть для мотора с правой стороны.
Советы и подсказки
Убедитесь, что в вашем роботе, направленном вперед, мотор с левой стороны – это первый мотор, указанный в перечне выбора порта. В противном случае, ваш робот будет поворачиваться в неверном направлении.
Используйте выбор режима для выбора предпочитаемого вами типа управления моторами. После выбора режима вы можете выбрать значения вводов. Доступные вводы будут меняться в зависимости от режима. Режимы и вводы описаны ниже.
Режимы: Включить, Выключить, Включить на количество секунд, Включить на количество градусов, Включить на количество оборотов
Режимы
Включить
В режиме «Включить» происходит включение обоих моторов, затем происходит немедленный переход в следующий блок программы. Вы можете управлять скоростью и направлением моторов при помощи вводов «Мощность» и «Рулевое управление». Моторы будут работать, пока их не остановят или позднее не заменят другим блоком в программе, или пока программа не закончиться.
Используемые вводы: Мощность, Рулевое управление
Пример
Используйте режим «Включить», когда хотите, чтобы другие блоки в вашей программе управляли продолжительностью включения моторов. В данной программе робот движется вперед. Когда нажимается датчик касания, робот останавливается.
Выключить
В режиме «Выключить» происходит выключение обоих моторов. Используйте режим «Выключить» для остановки робота, который был запущен в режиме «Включить» ранее в программе. См. пример выше.
Если ввод «Тормозить в конце» установлен на «Истина», моторы немедленно останавливаются. Моторы будут удерживаться в остановленном положении, пока другой блок перемещения или мотора не запустит их, или пока программа не закончится. Если ввод «Тормозить в конце» установлен на «Ложь», питание моторов просто отключается. Моторы будут двигаться по инерции, используя любую остаточную движущую силу, пока не остановятся, или пока не запустится другой блок перемещения или мотора.
Используемые вводы: Тормозить в конце






