

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Проведем анализ исходных баллистических принципов формирования боевых порядков ЭБО, что послужит основой для последующего рассмотрения вопросов управления движением ступени разведения.
Поскольку конфигурации боевых порядков характеризуются главным образом параметрами относительного движения элементов, то с целью определения этих параметров удобно выделить некоторый элемент, траекторию движения которого будем рассматривать в качестве опорной. Для определенности можно считать, что таким элементом является первый боевой блок, направляемый в некоторую точку цели  с заданными координатами, траектория которого полностью определена его начальными условиями движения
с заданными координатами, траектория которого полностью определена его начальными условиями движения  и
и  , заданными на момент отделения от ступени разведения.
, заданными на момент отделения от ступени разведения.
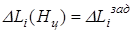
Для описания интересующих нас конфигураций боевых порядков (БП) достаточно каждому  -му элементу БП поставить в соответствие три параметра – относительные координаты его точки падения на поверхность Земли, рассматриваемые по отношению к точке падения опорного элемента, и разность моментов времени прилета -го и опорного элементов в соответствующие точки падения. Координаты точек падения будем рассматривать в прямоугольной целевой системе координат, связанной с точкой цели опорного элемента. В качестве такой системы примем для определенности естественную систему координат. Напомним, что оси
-му элементу БП поставить в соответствие три параметра – относительные координаты его точки падения на поверхность Земли, рассматриваемые по отношению к точке падения опорного элемента, и разность моментов времени прилета -го и опорного элементов в соответствующие точки падения. Координаты точек падения будем рассматривать в прямоугольной целевой системе координат, связанной с точкой цели опорного элемента. В качестве такой системы примем для определенности естественную систему координат. Напомним, что оси  и
и  естественной системы координат лежат в плоскости, касательной к поверхности общеземного эллипсоида в точке , причем ось
естественной системы координат лежат в плоскости, касательной к поверхности общеземного эллипсоида в точке , причем ось  направлена по касательной к линии естественной дальности в этой точке (рис. 4.7).
направлена по касательной к линии естественной дальности в этой точке (рис. 4.7).
Терминальные условия наведения -го элемента зададим следующим образом. В качестве финитного условия наведения будем рассматривать условие равенства текущей высоты полета ББ ее заданному значению в точке цели:
|
|
 ,
,  . (4.1)
. (4.1)
В качестве условий попадания рассмотрим три величины: относительные координаты  и
и  точки цели -го элемента и разность моментов времени прилета
точки цели -го элемента и разность моментов времени прилета  -ro и опорного элемента, определенные на момент выполнения финитного условия;
-ro и опорного элемента, определенные на момент выполнения финитного условия;
 ,
,  ,
,  , . (4.2)
, . (4.2)
Итак, с помощью величин  ,
,  и
и  может быть полностью охарактеризован боевой порядок, который образуют любые два элемента боевого оснащения в районе цели. Так, например, боевой порядок «цепочка» задается условиями
может быть полностью охарактеризован боевой порядок, который образуют любые два элемента боевого оснащения в районе цели. Так, например, боевой порядок «цепочка» задается условиями  ,
,  . Требуемая величина
. Требуемая величина  , определяющая интервал времени между прилетом рассматриваемых элементов в точку цели, будет определяться минимально допустимым расстоянием между соседними элементами в «цепочке» и средней скоростью движения элементов на рассматриваемой высоте.
, определяющая интервал времени между прилетом рассматриваемых элементов в точку цели, будет определяться минимально допустимым расстоянием между соседними элементами в «цепочке» и средней скоростью движения элементов на рассматриваемой высоте.
Для «изовысотного» боевого порядка определяющим является условие  , тогда как координаты и могут быть произвольными, но не равными нулю одновременно.
, тогда как координаты и могут быть произвольными, но не равными нулю одновременно.
В основу первоначального решения задачи разведения положим предположение об импульсном характере управления. Суть импульсного управления состоит в допущении, что разведение ЭБО на траектории их последующего движения осуществляется путем мгновенного сообщения отделяемому элементу требуемого приращения скорости  , однозначно определяемого терминальными условиями попадания (4.2).
, однозначно определяемого терминальными условиями попадания (4.2).
Рис. 4.7. Целевая система координат
Кинематический смысл схемы импульсного разведения проиллюстрирован на рис. 4.8, где изображены траектории двух элементов – траектория первого элемента, которая проходит через заданную точку цели  и является опорной, и траектория второго элемента, начальная скорость которого
и является опорной, и траектория второго элемента, начальная скорость которого  отличается от начальной скорости первого элемента
отличается от начальной скорости первого элемента  на величину
на величину  – приращение скорости второго элемента. Очевидно, что величина и направление приращения скорости полностью определяют пространственно-временные характеристики последующего относительно движения обоих элементов и, в частности, интересующие нас параметры
– приращение скорости второго элемента. Очевидно, что величина и направление приращения скорости полностью определяют пространственно-временные характеристики последующего относительно движения обоих элементов и, в частности, интересующие нас параметры  ,
,  и . Допущение о мгновенности сообщения отделяемому элементу требуемого приращения скорости является на первый взгляд весьма грубым. Однако оно практически полностью правомерно по отношению к ложным целям, так как ввиду малой массы ЛЦ их отделение от ступени разведения может быть осуществлено путем отстрела с помощью небольших пороховых зарядов, время срабатывания которых составляет доли секунды.
и . Допущение о мгновенности сообщения отделяемому элементу требуемого приращения скорости является на первый взгляд весьма грубым. Однако оно практически полностью правомерно по отношению к ложным целям, так как ввиду малой массы ЛЦ их отделение от ступени разведения может быть осуществлено путем отстрела с помощью небольших пороховых зарядов, время срабатывания которых составляет доли секунды.
|
|

| 
|
| Рис. 4.8. Схема импульсного отделения | Рис. 4.9. Приращения скорости при построении боевого порядка «цепочка» |
Поэтому при построении боевых порядков ложных целей, отстреливаемых одновременно с отделением прикрываемого ими боевого блока, схема импульсного разведения дает вполне приемлемую точность решения задачи.
В отличие от ложных целей приращение скорости боевому блоку сообщается путем разгона всей ступени разведенца, что требует значительно большего времени, в течение которого изменяется не только скорость, но и положение ступени разведения в пространстве. Следовательно, принимая схему импульсного разведения в данных условиях, мы пренебрегаем изменением координат ступени разведения в процессе формирования боевых порядков элементов боевого оснащения, а также длительностью этого процесса, внося тем самым определенную погрешность в получаемые результаты.
Тем не менее, схема импульсного разведения является хорошим первым приближением к более точному решению задачи. В рамках этой схемы при дополнительном допущении об относительной малости требуемых приращений скорости удается получить весьма простые зависимости для их расчета, имеющие наглядный физический и геометрический смысл. При этих зависимостей широко используются понятия градиентных и инвариантных направлений, смысл которых будет раскрыт ниже.
Проведем качественный анализ вопроса построения боевых порядков элементов БО в схеме импульсного разведения. Воспользуемся хорошо известным в баллистике понятием годографа требуемых скоростей, соответствующих одинаковой дальности полета. Для простоты ограничимся схемой плоского движения. Напомним, что годограф требуемых скоростей однозначно определяется двумя точками – точкой начала свободного движения и точкой цели и представляет собой кривую, на которой лежат концы векторов начальной скорости попадающих траекторий.
|
|
Проанализируем, каким образом следует выбрать направление приращения скорости, чтобы обеспечить построение боевого порядка «цепочка», когда траектории всех элементов проходят через общую точку цели. На рис. 4.9 изображен годограф требуемых скоростей и попадающие траектории трех элементов. Средняя траектория выбрана в качестве опорной траектории. Нижняя траектория является более пологой и время движения по ней меньше, чем по опорной траектории,  . Верхняя траектория более крутая и
. Верхняя траектория более крутая и  .
.
Таким образом, все три элемента образуют в районе цели боевой порядок «цепочка». Боевые блоки приходят в точку цели последовательно, с интервалами времени  и
и  , определяемыми приращениями скорости
, определяемыми приращениями скорости  и
и  .
.
Из рисунка видно, что при малых приращениях скорости, векторы  и
и  лежат практически на одной прямой, представляющей собой касательную к годографу требуемых скоростей, проведенную в точке, на которой лежит конец вектора
лежат практически на одной прямой, представляющей собой касательную к годографу требуемых скоростей, проведенную в точке, на которой лежит конец вектора  . В данном случае эта касательная задает известное направление баллистической вертикали. Ниже мы воспользуемся этим понятием для более общего случая пространственного движения.
. В данном случае эта касательная задает известное направление баллистической вертикали. Ниже мы воспользуемся этим понятием для более общего случая пространственного движения.
Перейдем к вопросу построения изовысотного боевого порядка. На рис. 4.10 изображены две цели, соответствующие им годографы требуемых скоростей и две попадающие траектории. В данном случае приращение скорости должно быть выбрано так, чтобы время движения по обеим попадающим траекториям было одинаковым. Ясно, что траектория второго элемента, проходящая через точку  , должна быть более пологой.
, должна быть более пологой.
В заключение рассмотрим случай, когда требование синхронности прилета элементов в точки  и снимается и вместо него ставится условие минимальности требуемого приращения скорости. Нетрудно видеть, что в этом случае приращение скорости должно быть ориентировано по направлению кратчайшего расстояния между годографами
и снимается и вместо него ставится условие минимальности требуемого приращения скорости. Нетрудно видеть, что в этом случае приращение скорости должно быть ориентировано по направлению кратчайшего расстояния между годографами  и
и  , т.е. по нормали к годографу
, т.е. по нормали к годографу  в точке, где лежит конец вектора (рис. 4.11).
в точке, где лежит конец вектора (рис. 4.11).

|

|
| Рис. 4.10. Приращения скорости при построении изовысотного боевого порядка | Рис. 4.11. Минимальное требуемое приращение скорости |
Это направление ортогонально упомянутому выше направлению баллистической вертикали и лежит в плоскости баллистического горизонта, точное определение которой требует рассмотрения пространственного движения элементов и будет сформулировано ниже.
|
|
Итак, мы провели предварительный качественный анализ вопроса, связанного с построением боевых порядков элементов боевого оснащения в схеме плоского движения. Перейдем к выводу количественных соотношений по определению требуемых приращений скорости в общем случае пространственного движения.
|
|
|

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!