Уравнение якорной цепи:
Uя = CeФn+LяцdI/dt+RяцI, (4.1)
где
Rяц = Rя+Rдп+Rр (4.2)
Lяц = Lя+Lр (4.3)
 (4.4)
(4.4)
Электромагнитная постоянная времени:
Тя = Lяц/Rяц (4.5)
Уравнение движения:
 , (4.6)
, (4.6)
где общий маховый момент двигателя и трала
GD2 = GDд2+GDтр2 = 200+486,3 = 686,3 Н·м2, (4.7)
где GDтр2 = 4G(v/2pn)2 (4.8)
Механическая постоянная времени:
 (4.9)
(4.9)
При расчете систем регулирования скорости воздействия на возбуждение двигателя удобно пользоваться структурной схемой, показанной на рис. 4.4.
При определении постоянной времени обмотки возбуждения используется формула:

Тв=Lв/Rв, (4.10)
где,
Lв=2рxWов´(DФн/DIв)
гдеx – коэффициент, учитывающий рассеяние:
x=1+(0.5/0.7)´(s-1) (4.11)
где s-коэффициент рассеяния (1,12-1,18)
Iв = Uв/Rв (4.12)
Кв = Фн/Iвн (4.13)
Постоянная времени вихревых токов
Твт = (0.2 ¸ 0.3)Тв (4.14)
Передаточная функция тиристорного преобразователя как звена системы автоматического управления имеет вид
Wтп(р)=Етп(р)/Uy(р)» Квп/(Тmр+1) (4.15)
где Тm=(0,003-0,004) с – постоянная времени, учитывающая запаздывание системы управления и самого преобразователя.
Для силового преобразователя коэффициенты усиления:
Квп = Етп/Uy (4.16)
Для регулятора тока, имеющего ПИ закон регулирования, который выбирается из условия "технического оптимума" систем подчиненного регулирования и имеет вид:
Wрт(р) = Rяц(Тяр+1)/(КвпКтатТmр), (4.17)
где коэффициент передачи датчика тока при максимальном рабочем токе
Кт = Кшя´Кдтя = 10/(Крп´Iн), (4.18)
где Крп - коэффициент максимальной перегрузки, ат = 2 – отношение постоянной времени интегрирования контура тока к некомпенсированной постоянной времени.
Передаточная функция регулятора скорости имеет ПИ закон регулирования, что соответствует двукратной интегрирующей системе
Wрс(р)=(р×bc×ac×Tт+1)´Тм/(р×bс×ас2×Тт2) (4.19)
При этом на входе устанавливается фильтр с передаточной функцией
Wф(р)=(рbcacTт+1)-1,
где Tт = 2Тm = 2´0,003 = 0,006 с; ac = bc = 2, Кс = U3Cmax/nmax
Передаточная функция регулятора скорости для П-закона регулирования:
Wрс(р) = (Tм/ас×Тт)´(Кт×Се×Ф)/(Кс×Rяц) (4.20)
Передаточная функция регулятора тока возбуждения имеет вид
Wртв(р) = Rв[(Тво+Твт)р+1]/(Твт×р×Ктпв×Ктв) (4.21)
где Ктв - коэффициент передачи датчика тока возбуждения, Ктв = UЗАД.ТВmax/Iвн, Ктпв – коэффициент усиления тиристорного преобразователя цепи возбуждения:
Ктпв = ЕТПВmax/Uymax
Ттв – постоянная времени интегрирования контура тока возбуждения:
Ттв = 2Тm
Передаточная функция регулятора ЭДС принимается обычно И законом регулирования, так как переходные процессы в контуре регулирования соизмеримы со скоростью изменения частоты вращения двигателя:
WРэдс = 1/(р×аэТтв(КвКэ/Кт)n0) (4.22)
Структурная схема САУ траловой лебедки БАТ СП пр. В-400 приведена на рис. 4.5.

Задание на исследование:
1. Изучить работу системы автоматического управления тиристорным электроприводом траловой лебедки БАТ СП пр. В-400, построенную по принципу систем подчиненного регулирования параметров.
2. Рассчитать параметры регуляторов токов якоря возбуждения скорости и ЭДС с различными законами регулирования.
3. Исследовать влияние параметров настройки регуляторов на качество переходных процессов при их отклонения.
4. Составить модель регулируемого токоограничения и исследовать его влияние на работу системы.
5. Исследовать влияние задатчика интенсивности на работу системы при различных параметрах его настройки.
6. Предложить электронную схему реализации законов регулирования.
7. Проанализировать кривые переходных процессов, полученных при моделировании.
5. Лабораторная работа № 5
Моделирование электропривода ваерной лебедки СТМ "Атлантик-333"
Цель работы: Изучение системы автоматического управления электропривода ваерной лебедки СТМ по системе Г-Д с тиристорными возбудителями и овладение методикой имитационного моделирования режимов работы.
Общие сведения
Ваерной лебедкой типа 2x1 KLW 90 (производства фирмы "Шиффсэлектроник") оснащаются суда проекта "Атлантик-333". Эти суда предназначены для лова рыбы, а также ее разделки и заморозки.
| Характеристика ваерной лебедки:
|
| Тип лебедки
| 2x1 KLW 90
|
| Тяговое усилие на ваере, кН
|
|
| Скорость, м/с
|
|
| – выборки ваера
| 1.4
|
| – травление ваера
| 3. 0
|
| Передаточное отношение редуктора между электродвигателем и барабаном
|
|
| КПД передачи
| 0. 825
|
| Длина ваера, м
|
|
| Диаметр:
|
|
| – ваера, мм
| 26. 5
|
| – барабана лебедки, мм
|
|
| – реборд барабана, мм
|
|
| Длина барабана между ребордами, мм
|
|
| Емкость барабана, м
|
|
| Число слоев ваера на барабане
|
|
| Максимальное удерживаемое усилие при тралении, кН
|
|
| Разрывное усилие, кН
|
|
Системы электроприводов ваерных лебедок 2x1 KLW 90, сейнерной лебедки ISW 140 и поперечного подруливающего устройства 1 QRF 130 построены по принципу систем неизменного тока генератор-двигатель и состоят из валогенератора и приводного двигателя.
|
|
| Валогенератор постоянного тока типа GGASР 0609-1000
|
| номинальной мощности, кВт
|
|
| номинальным током, А
|
|
| номинальным напряжением, В
|
|
| Приводной двигатель типа GMFSР 0314-760
|
| номинальной мощностью, кВт
|
|
| номинальным напряжением, В
|
| |
| номинальным током, А
|
|
| номинальным числом оборотов, об/мин
|
|
| диапазоном регулирования числа оборотов, об/мин
| 100¸2000
|
| максимальным вращающим моментом, Нм
|
|
| | | | |
Электродвигатели оснащены электромагнитным тормозом типа BZF 250 V1. Для регулирования тока генератора и числа оборотов электродвигателя применяются выпрямители тока возбуждения типа СТОСО-033 DGK 400/40. Питание установки осуществляется от главного распределительного щита переменным напряжением 380В, а также используется 220В для питания контакторов, 42В -для реле, ±24В и ±15В – для систем регулирования и сигнализации. Функциональная схема изображена на рис. 5.1.
Каждый из барабанов траловой лебедки приводится во вращение отдельным электродвигателем М1 и М2. Якоря обоих электродвигателей включены последовательно и питаются от общего генератора G1. При всех режимах работы лебедки величина и направление тока главной цепи (тока якоря) остается неизменным.
Для принципа стабильного (неизменного тока), выбранного для данной установки, регулировка тока якоря и скоростей (числа оборотов) осуществляется через панели
| |
| | | Рис 5.1 – Функциональная схема электроприводалебедки 2*1 3KLW 90
| |
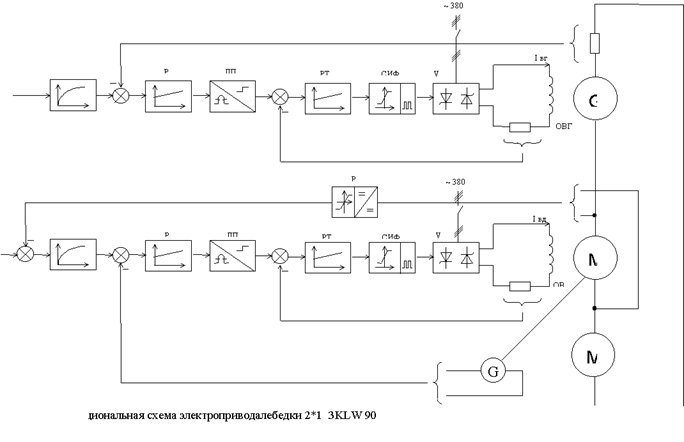
соответствующих машин. В качестве исполнительных элементов применяются управляемые выпрямители, выполненные по схеме со встречным соединением.
Применяемый принцип регулирования обуславливает, независимо от нагрузки и числа оборотов соответствующих приводных двигателей в цепи якоря, протекание стабильного тока через якорь, равного 700 А. Здесь выбрано каскадное регулирование, т. е. цепь регулирования тока возбуждения подчиняется цепи регулирования тока якоря. Заданный якорный ток сравнивается с фактическим значением якорного тока. У регулятора якорного тока, как и у регулятора тока возбуждения используется изодромная характеристика.
Регулировка числа оборотов осуществляется через обмотку возбуждения соответствующего двигателя с помощью управляемого выпрямителя, выполненного на схеме со встречным соединением.
Здесь также выбрано каскадное регулирование, т. е. цепь регулирования тока возбуждения подчиняется цепи регулирования числа оборотов.
Заданное значение скорости, установленное на соответствующем командоконтролере в пульте управления, через интегральный каскад подается на регулятор скорости вращения, где оно сравнивается с фактическим значением числа оборотов. Фактическое значение числа оборотов снимается с тахогенератора, присоединенного непосредственно к приводному двигателю.
Выход регулятора числа оборотов ограничивается и подводится к подчиненной цепи регулирования тока возбуждения. Ограничением гарантируется, что определенный ток возбуждения не превышается. Для приводов, работающих на стабильном токе, это означает, что этим одновременно ограничивается и момент двигателя. Оба регулятора имеет изодромную характеристику.
При достижении номинального напряжения у машин через электронный пороговый выключатель часть напряжения якоря по обратной связи подается на интегратор заданного значения (вычитание из заданного значения числа оборотов), что при одновременном понижении числа оборотов мощность поддерживается постоянной.
Полученное по обратной связи напряжение якоря для гальванического разъединителя подается на разъединитель потенциала.
Характеристики двигателя GMFSР 0314-760
| Номинальное напряжение, Uн, В
|
|
| Номинальный ток, Iн, А
|
|
| Номинальная мощность, Рн, кВт
|
|
| Номинальное число оборотов, nн, об/мин
|
|
| Максимальная частота вращения, nmax, об/мин
|
|
| Номинальная Э. Д. С, Eн, В
|
|
| КПД, %
| 0. 904
|
| Номинальный поток, Тл, Фн
| 0. 04130
|
| Сопротивление якоря, Rя Ом
| 0. 00722
|
| Сопротивление компенсационной обмотки, Rко, Ом
| 0. 00370
|
| Сопротивление добавочных полюсов, Rдп, Ом
| 0. 00201
|
| Число пар полюсов, 2р
|
|
| Число проводников, N
|
|
| Число параллельных ветвей, а
|
|
| Напряжение возбуждения, Uв, В
|
|
| Ток возбуждения, Iв, А
|
|
| Число витков обмотки возбуждения, Wов
|
|
| Индуктивность обмотки возбуждения, Lв, Гн
| 4. 34
|
| Маховый момент, GD2, кг/м2
|
|
Рассмотрим якорную цепь двигателя постоянного тока. Уравнение якорной цепи имеет вид:
Uя = Се·Фя·n+Lяц·dI/dt+Rяц·I (5.1)
где Uя -напряжение, подаваемое на якорь двигателя, В; Се -конструктивный коэффициент пропорциональности; Фя -магнитный поток, Вб; n -скорость вращения якоря, об/мин; Lяц-индуктивность якорной цепи электропривода, Гн; i -ток якоря ДПТ, А; Rяц - активное сопротивление якорной цепи электропривода, Ом.
Сопротивление якорной цепи рассчитываем по формуле:
Rяц = 2·1,2·(Rя+Rдп+Rкоя) (5.2)
где Rя – активное сопротивление якоря, Ом; Rдп – активное сопротивление дополнительных полюсов машины, Ом; Rкоя – сопротивление компенсационной обмотки, Ом.
Индуктивность якорной цепи определяется следующим образом:
 (5.3)
(5.3)
где Lя -индуктивность якоря, Гн, которая определяется по формуле:
 (5.4)
(5.4)
Электромагнитная постоянная времени якорной цепи:
 (5.5)
(5.5)
Далее преобразуем уравнение (5.1), тогда с учетом генератора уравнение имеет вид:
 (5.6)
(5.6)
где
 (5.7)
(5.7)
 (5.8)
(5.8)
 (5.9)
(5.9)
 (5.10)
(5.10)
Уравнение движения имеет вид:
 (5.11)
(5.11)
где GD2 - маховый момент электропривода, приведенный к валу двигателя, кг×м2; Мс - момент сопротивления на валу ДПТ, кг×м; См - конструктивный коэффициент пропорциональности.
Далее преобразуем уравнение (5.11). Пусть постоянная Тм, называемая механической постоянной времени, равна по определению
 (5.12)
(5.12)
Тогда получим следующее:
 (5.13)
(5.13)
 (5.14)
(5.14)
где  (5.15)
(5.15)
В результате получим два уравнения:
, (5.16)
Цепь возбуждения двигателя может быть описана следующими уравнениями:
 (5.17)
(5.17)
где Uв – напряжение возбуждения, В; Rв – активное сопротивление цепи возбуждения, Ом; iв – ток возбуждения, А; Lв – индуктивность цепи возбуждения, Гн.
Индуктивность цепи возбуждения определяется по формуле:
 (5.18)
(5.18)
 (5.19)
(5.19)
где x – коэффициент, учитывающий рассеяние; s – коэффициент рассеяния (1,12¸1,18), Wов – количество витков обмотки возбуждения, DФ/Di – переменный коэффициент, зависящий от кривой намагничивания и определяющийся графическим путем.
Сопротивление обмотки возбуждения:
 (5.20)
(5.20)
Электромагнитная постоянная времени обмотки возбуждения Тв:
 (5.21)
(5.21)
Таким образом для цепи возбуждения:
 (5.22)
(5.22)
Статический вентильный преобразователь в общем случае можно представить в виде апериодического и запаздывающего звеньев. В операторной форме уравнение имеют вид:
 (5.23)
(5.23)
где Етп – напряжение на выходе тиристорного преобразователя, В; Тm – постоянная времени системы фазового управления, сек; Ктп – коэффициент усиления преобразователя; Uу – напряжение управления тиристорным преобразователем, В; t – время запаздывания, t = 1/(f(m)) сек, f – частота сети, m – пульсность преобразователя.
Заменяем е-tр первым членом разложения в ряд 1/(1+tр) и подставляем его в уравнение (5.23). Проведя дальнейшие преобразования и упрощения получаем уравнение:
 (5.24)
(5.24)
где Тm – постоянная времени (0,005 - 0,01) с. Примем Тm = 0.01 с
Передаточная функция регулятора тока, имеющего ПИ закон регулирования имеет вид в относительных единицах:
 (5.25)
(5.25)
при времени переходного процесса t1 = 4.7×Тm и перерегулировании s = 4.39 %.
Периодическая функция регулятора скорости с ПИ-законом регулирования имеет вид в относительных единицах:
 (5.26)
(5.26)
Составим структурную схему для моделирования (рис 5.2) на основе уравнений объектов управления:
 (5.27)
(5.27)
Конструктивные коэффициенты Сед, Сег и См можно найти из уравнения электрического равновесия.
Коэффициенты усиления тиристорных преобразователей:
Ктп1 = 110/6.4 = 17.18
Ктп2 = 110/12 = 9.167
Коэффициент тахогенератора:
Ктг = 12/760 = 0.0158
Коэффициент датчика тока:
Кдт = 6.4/700 = 0.009
Коэффициент датчика тока возбуждения:
Кдтв1 = 6.4/110 = 0.058
Кдтв2 = 12/110 = 0.109
Задание на исследование
1. Изучить работу системы автоматического управления электроприводом.
2. Подготовить структурную схему к форме удобной к моделированию контура тока и контура скорости с расчетом параметров элементов системы.
3. Промоделировать электропривод в основных режимах (пуск, выборка, травление ваеров).
4. Оценить влияние узла ограничения мощности.
6. Лабораторная работа № 6.
Моделирование тиристорного электропривода ваерной лебедки
РТМСК "Атлантик 488"
Цель работы: Изучение системы автоматического управления тиристорного электропривода ваерной лебедки и овладение методикой имитационного моделирования режимов работы
Общие сведения: Ваерные лебедки типа 1T W 480 РТМС "Атлантика 488" состоит из следующих узлов: барабан с опорой, насаживаемая передача с тормозом, двигатель с тормозом и охлаждением, наматывающее приспособление с приводом.
Привод лебедки осуществляется двигателем постоянного тока типа GMRSO 0814-430. Оба привода лебедок питаются от отдельных валогенераторов трехфазного тока. В случае выхода из строя одного валогенератора электропитание лебедок осуществляется от судовой сети.
Управление лебедок осуществляется от пульта управления или с промысловой рубки, которые расположены в помещении обслуживания лебедок либо на мостике.
Установка измерения длины ваера программируется и обслуживается с пульта управления. Сигналы тягового усилия обрабатываются в электронном блоке.






