Обобщенный вектор, как и любой вектор на комплексной плоскости, можно представить алгебраической формой записи комплексного числа.
Обычно это делают, совмещая вещественную ось с осью обмотки в фазе «А».
Тогда  . (55)
. (55)
 . (56)
. (56)
 . (57)
. (57)
Подставляя в выражение для  (
( ) значения операторов поворота
) значения операторов поворота  и
и  , записанные в алгебраической форме, и разделяя вещественную и мнимую части получим
, записанные в алгебраической форме, и разделяя вещественную и мнимую части получим
 . (58)
. (58)
 . (59)
. (59)
Переход от представления обобщенного вектора через проекции на оси трехфазных обмоток к представлению через проекции на оси комплексной плоскости эквивалентен преобразованию трехфазной системы обмоток в эквивалентную двухфазную.
В матричной форме преобразование от трехфазной системы обмоток к эквивалентной двухфазной можно записать в виде
 . (60)
. (60)
Обратное преобразование координат обобщенного вектора от проекций на оси комплексной плоскости к представлению через проекции трехфазных обмоток осуществляется по следующей матричной формуле
 . (61)
. (61)
13.10. Преобразование «обобщенного» вектора на комплексной плоскости в разных системах координат
В соответствии с выражением (51) преобразование обобщенного вектора , записанного в системе координат « », в вектор , записанной в системе координат «
», в вектор , записанной в системе координат « », сдвинутой на угол «
», сдвинутой на угол « » относительно системы координат «», можно представить в развернутом виде следующим образом:
» относительно системы координат «», можно представить в развернутом виде следующим образом:
 .
.
Раскрывая скобки и преобразуя полученное алгебраическое выражение, получим:
 . (62)
. (62)
Приравнивая действительные и мнимые части в правой и левой частях выражения (62), получим:
 . (63)
. (63)
 . (64)
. (64)
Можно также найти составляющие вектора  и
и  в матричной форме.
в матричной форме.
 . (65)
. (65)
Обратное преобразование для определения проекций в системе координат «» по известным проекциям в системе координат «» производится по следующей матричной формуле.
 . (66)
. (66)
Обратное преобразование координат в развернутом виде выглядит в следующем виде.
 . (67)
. (67)
 . (68)
. (68)
13.11. Преобразование «обобщенных» векторов потокосцеплений статора и ротора АД при записи в другой системе координат
В выражениях (47) и (48) для потокосцеплений  и
и  векторы тока статора и ротора записаны в различных системах координат. Так, в выражении для потокосцепления ток статора записан в неподвижной системе координат «», связанной со статором, а ток ротора во вращающейся системе координат «», связанной с ротором (смещенной на текущий угол «
векторы тока статора и ротора записаны в различных системах координат. Так, в выражении для потокосцепления ток статора записан в неподвижной системе координат «», связанной со статором, а ток ротора во вращающейся системе координат «», связанной с ротором (смещенной на текущий угол « »). Полная запись выражения для потокосцепления с учетом индексов систем координат выглядит следующим образом.
»). Полная запись выражения для потокосцепления с учетом индексов систем координат выглядит следующим образом.
 . (69)
. (69)
Если обе части выражения (69) умножить на оператор поворота  , то получим:
, то получим:
 . (70)
. (70)
Запишем выражение (70) в развернутом виде с учетом выражения (51).
 . (71)
. (71)
 . (72)
. (72)
 . (73)
. (73)
Тогда окончательно потокосцепления статора с учетом всех токов АД и независимо от выбранной системы координат можно представить в виде
. (74)
. (75)
 . (76)
. (76)
По аналогии также можно записать потокосцепления ротора с учетом всех токов АД независимо от выбранной системы координат.
 . (77)
. (77)
В уравнениях (76) и (77) все коэффициенты являются постоянными величинами и не зависят от взаимного расположения обмоток статора и ротора, т.к токи статора и ротора записаны в одной и той же системе координат.
Из выражений следует, что потокосцепления статора и ротора раскладываются на составляющие, обусловленные собственным током ( и
и  ) и током другой части АД (
) и током другой части АД ( и
и  ).
).
Пользуясь тем, что сумма токов статора и ротора образует ток намагничивания АД (см. рис. 12), т.е.  , потокосцепления статора и ротора можно также представить через потокосцепление основного магнитного потока
, потокосцепления статора и ротора можно также представить через потокосцепление основного магнитного потока  и потокосцепления рассеяния статора
и потокосцепления рассеяния статора  и ротора
и ротора  .
.
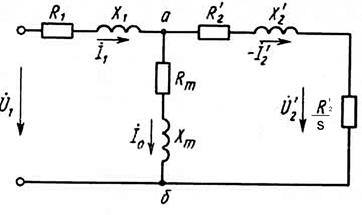
Рис. 12. Схема замещения АД
 . (78)
. (78)
 . (79)
. (79)
13.12. Преобразование уравнений статора и ротора для записи в общей системе координат
Уравнения для цепи статора и ротора с применением обобщенных векторов тока, напряжения и потокосцепления имеют следующий вид.
 . (80)
. (80)
 . (81)
. (81)
Уравнения для  и
и  записаны в разных системах координат. Уравнение для статорной цепи записано в неподвижной системе координат с осями . Уравнение для роторной цепи записано во вращающейся системе координат с осями . Для перевода и записи уравнения для роторной цепи в неподвижной системе координат «» умножим обе его части на оператор поворота
записаны в разных системах координат. Уравнение для статорной цепи записано в неподвижной системе координат с осями . Уравнение для роторной цепи записано во вращающейся системе координат с осями . Для перевода и записи уравнения для роторной цепи в неподвижной системе координат «» умножим обе его части на оператор поворота  . Умножение уравнения для на оператор поворота осуществляет поворот системы координат «» на текущий угол поворота
. Умножение уравнения для на оператор поворота осуществляет поворот системы координат «» на текущий угол поворота  . Представим в производной (
. Представим в производной ( ) вектор потокосцепления ротора () в системе координат «» как
) вектор потокосцепления ротора () в системе координат «» как  . (82)
. (82)
После преобразований с учетом выражения (82), опуская индексы координатной системы, получим уравнение ротора в векторной форме в системе координат статора «».
 . (83)
. (83)
 . (84)
. (84)
 . (85)
. (85)
Если угол поворота изменяется прямо пропорционально времени  , т.е
, т.е  , то
, то  – текущая скорость вращения ротора.
– текущая скорость вращения ротора.
Таким образом, уравнение ротора в векторной форме в неподвижной системе координат статора «» выглядит так.
 . (86)
. (86)





