

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В настоящее время в связи с повышением требований к оперативности управления предельно актуальной является проблема оперативного наиболее точного восстановления и преобразования искаженного сигнала измерительной системы. Даже если исключить внешние помехи, сами измерительные системы искажают входной сигнал. В данном разделе рассмотрены элементы математической теории измерительно-вычислительных систем, позволяющей по результатам динамических измерений осуществить восстановление (осуществить редукцию) измеряемого сигнала.
Выходной сигнал y(t) измерительной системы с импульсной переходной функцией k(t,t) может быть представлен в виде
 (2.1)
(2.1)
Поскольку в уравнении (2.1) входной сигнал x(t) определен на конечном промежутке [0,t], то в качестве спектрального базиса можно выбрать тригонометрические функции, функции Уолша,функции Хаара и т.д.
Выбор в качестве базиса тригонометрических функций, функций Уолша,Хаара обусловлено не только хорошими аппроксимативными свойствами, но и возможностью использовать для расчетов алгоритмы быстрых преобразований. Обозначим ортонормированный базис:
 . (2.2)
. (2.2)
Представим X(f) в виде разложения по системе Ф:
 , (2.3)
, (2.3)
где
 , (2.4)
, (2.4)
Подставляя выражение (2.3) в (2.1) получим
 . (2.5)
. (2.5)
обозначим
 .
.
В свою очередь элементы yn(f) также можно разложить по базису (2.2)

 , (2.3)
, (2.3)
где
 (2.4)
(2.4)
Так как выходной сигнал y(f) также может быть представлен в виде разложения по базису (2.2)
 , (2.5)
, (2.5)
то получим матричное уравнение, связывающее спектры исходного входного сигнала и выходного сигнала
 , (2.6)
, (2.6)
Тогда спектр исходного сигнала получим из соотношения
 , (2.7)
, (2.7)
и сам сигнал при найденном спектре определится из выражения (2.3).
|
|
Для демонстрационного примера используем в качестве базисных функций систему
 , i=0, ±1, ±2; 0£t£t.
, i=0, ±1, ±2; 0£t£t.
Выберем в качестве динамической модели измерительной системы интегратор-1/р (рис.2.1.), входной сигнал измерительной системы-1(t) (рис.2.2).Число наблюдаемых отсчетов выходного сигнала равно 4.
 |
Выберите динамическую модель измерительной системы
р
дифференциатор
Рис.2.1. Пример выбора модели искажающей системы
 |
Рис.2.2 Пример выбора модели входного сигнала системы
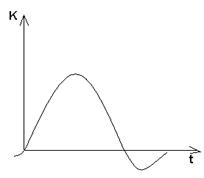
При этом получим аппроксимированный выходной сигнал (рис.2.3), восстановленный входной сигнал (рис.2.4).
 |
Рис.2.3. Аппроксимированный выходной сигнал.
Рис.2.4. Восстановленный входной сигнал.
Матрица двумерной передаточной функции {dne}дифференцирующего звена Р имеет вид
| … | … | … | … | … | … | … | … | … | … | … | … | … | ||
| … | d-4,-4 | … | d-4,-3 | d-4,-2 | d-4,-1 | d-4,0 | d-4,1 | d-4,2 | d-4,3 | … | d-4,n | … | -n | |
| … | … | … | … | … | … | … | … | … | … | … | … | … | ||
| … | d-3,-4 | … | 2-j6p | … | d-3,n | … | -3 | |||||||
| … | d-2,4 | … | 2-j4p | … | d-2,n | … | -2 | |||||||
| … | d-1,4 | … | 2-j2p | … | d-1,n | … | -1 | |||||||

| … | d0,-n | … | … | d0,n | … | n=0 | |||||||
| … | d1,-4 | … | 2+j2p | … | d1,n | … | +1 | |||||||
| … | d2,-4 | … | 2+j4p | … | d2,n | … | +2 | |||||||
| … | d3,-4 | … | 2+j6p | … | d3,n | … | +3 | |||||||
| … | … | … | … | … | … | … | … | … | … | … | … | … | … | |
| dn,-4 | … | dn,-3 | dn,-2 | dn,-1 | dn,0 | dn,1 | dn,2 | dn,3 | … | d-n,n | … | n | ||
| … | … | … | … | … | … | … | … | … | … | … | … | … | … | |
| -n | -3 | -2 | -1 | e=0 | ... | n |
где dn,n=  =2+j2pn.
=2+j2pn.
Спектральные характеристики, определенные относительно системы функции (2.2), представлены таблицей
| x(t) | 
| i =0, ±1, ±2 |
| 1(t) | 
| i =0 i = ±1, ±2,… |
| t | 
| i =0 i = ±1, ±2,… |
| t2 | 
| i =0 i = ±1, ±2,… |
Матрица {dne} для линейного стационарного звена имеет вид
|
|
 .
.
Точность метода необходимо контролировать путем увеличения размерности матрицы Р.
Спектрально – временной метод восстановления сигнала (Солодовников)(МОИ)
Для приближенной реализации дифференциатора заменяем дифференциатор выражением:
Подбором  можно данное звено приблизить к дифференцирующему звену в заданной полосе частот. Пусть =0,1. Такое звено реализуемо, т.к. порядок знаменателя больше порядка числителя.
можно данное звено приблизить к дифференцирующему звену в заданной полосе частот. Пусть =0,1. Такое звено реализуемо, т.к. порядок знаменателя больше порядка числителя.

Представим это звено в виде разложения по экспоненте:

Обозначим  = F(p,i), тогда
= F(p,i), тогда  =
= 
Задаем значения p (p=j  )
)


Тогда  - импульсная переходная функция дифференцирующего звена
- импульсная переходная функция дифференцирующего звена
Импульсная переходная функция дифференцирующего звена получилась практически конечной, поэтому сумму  можно вычислить в реальном времени с помощью БПФ.
можно вычислить в реальном времени с помощью БПФ.
Итерационный метод восстановления входного сигнала.(АОИ+ИСРИС)
В некоторых случаях взятие обратного оператора невозможно.
В этой процедуре отсутствует взятие производной. Итерационный процесс реализуется по уравнению

 малая величина, обеспечивающая сходимость процесса.
малая величина, обеспечивающая сходимость процесса.
 наблюдаемый выходной сигнал датчика.
наблюдаемый выходной сигнал датчика.
 восстановленный входной сигнал.
восстановленный входной сигнал.
 оператор преобразования.
оператор преобразования.
(из лабораторной работы)
|
|
|

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!