Извлеките все файлы из архивов. Скаченных со страницы https://secure.xilinx.com/webreg/clickthrough.do?cid=199792
| zvik_camera_linux_app
| Основное приложение для работы с камерой
|
| zvik_camera_linux_webserver
| Приложение для обработки запросов поступающих от Веб Интерфейса
|
Таблица 4. Обзор файлов архива
ИМПОРТ И СБОРКА ПРИЛОЖЕНИЙ ДЛЯ LINUX
1. В SDK выберите File> Import
2. В появившемся окне выберите Existing Project into Workspace
3. Корневой директорией проекта выберите C:\zc702-zvik-camera\software\workspace
4. После выбора корневой директории, вы увидите список доступных для импорта проектов
5. Выберите следующие (не забудьте поставить галочку Сору Projects into workspace):

Рис 29. Необходимые для импорта файлы
6. Нажмите Finish. SDK импортирует файлы в проект
УДАЛЕННОЕ ПОДКЛЮЧЕНИЕ К ПЛАТЕ
1. Подключитесь через терминал (115200 бод)
2. Введите команду quit
3. Проверьте настройки IP адреса (ifconfig)
4. Для предотвращения автоматической загрузки приложения при старте системы измените файл init.sh (vi /mnt/launch_my_app.sh)
Закомментировав следующую строку
# /mnt/zvic_camera_linux_app.sh
Удаленное подключение может быть установлено с использованием Secure shell (SSH) как через SDK, так и с помощью сторонних программ, например, Putty. Откройте программу Putty выберите подключение по SSH, введите IP-адрес на котором находится плата[5]После установки соединения введите имя пользователя и пароль(root, root).
В SDK выберите Window-> Open Perspective -> Other… -> Remote System Explorer -> OK. Нажмите на иконку New Connection

Рис 30. Определение нового соединения
Выберите SSH only, введите IP адрес 192.168.70.153 в поле Host name, нажмите Finish. В поле Remote Systems откройте 192.168.70.153, откройте sftp Files, дважды кликните Root. Введите пароль и логин.(root, root), поставьте галочки Save User ID, Save Password, нажмите ОК. Нажмите Yes, Yes.Откройте директорию /mnt. Таким образом, мы получили доступ к файлам на SD карте.
Для удаленного доступа к терминалу в поле Remote Systems выберите SSH terminals, кликните правой кнопкой мыши и выберите Launch Terminal.
ОТЛАДКА ПРИЛОЖЕНИЯ
Для отладки приложения необходимо:
1. Сменить перспективу (перспектива отладки) в SDK (Window -> Perspective-> Debug Perspective, C/C++(Default)).
2. Выбрать приложение zvic_camera_linux_app, щёлкнув по нему правой кнопкой мыши, а затем выберать Debug as-> Debug Configuration
3. В окне настроек конфигурации отладки выбрать Remote ARM Linux Application
4. Ввести адрес платы, например, 192.168.70.153
5. В поле абсолютный удаленный путь ввести /tmp/zvik_camera_linux_app.elf
6. Нажать “Применить”
7. Нажать “Debug”
8. Нажать “Yes”.
9. В консоли включить “verbose console mode”
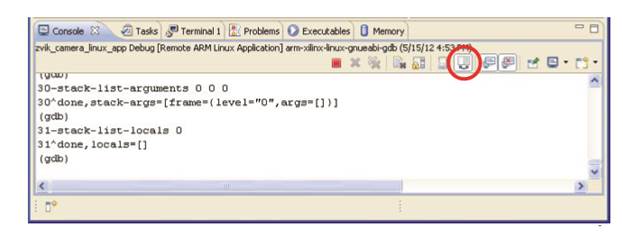
Рис 32. Расположение“verbose console mode”
10. Выбрать zvik_camra_linux_app.elf
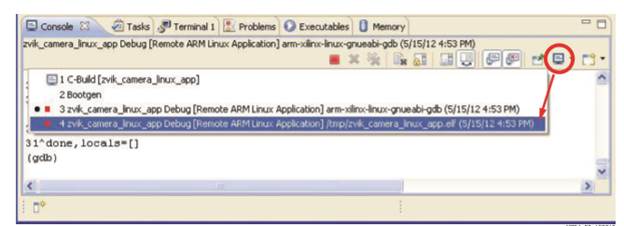
Рис 31. Расположение zvik_camra_linux_app.elf
11. Нажать F8
УСТАНОВКА ТОЧЕК ОСТАНОВКИ
Для установки точки остановки в файле avnet_console.c, на функции avnet_console_record_command, необходимо:
1. Выбрать Window-> Open Perspective -> C/C++
2. Выбрать файл avnrt_console.c
3. Поставить точку у функции avnet_console_record_command.
4. Вернуться в перспективу отладки.
5. В терминале ввести команду rec /mnt/image1.bmp.
6. Отладчик остановится на команде avnet_console_record_command. Нажать кнопку F8.
7. Перейти в перспективу Remote System Explorer
8. Перейти в директорию /mnt/
9. Нажать обновить, созданный bmp файл будет виден в обозревателе.
10. Нажать F8.





