Для выполнения транспортных и загрузочно-разгрузочных работ в ГПС применяют автоматические транспортные тележки с прямолинейными рельсовыми путями и безрельсовые самодействующие транспортные тележки, так называемые робокары.
Самоходные транспортные тележки с прямолинейными транспортными путями в отличие от конвейеров-накопителей, где все спутники перемещаются одновременно, обеспечивают доставку из центрального накопителя к станку только одного спутника с произвольным выбором. Самоходные транспортные тележки не сложны по конструкции, просты в эксплуатации, их применяют в современных транспортно-накопительных системах ГПС как средство, обеспечивающее связь между центральным накопителем (магазином) спутников, устройствами смены спутников на станках и рабочими местами операторов. Транспортно-накопительные системы с самоходными транспортными тележками позволяют обслуживать несколько многоцелевых станков ГПС, их используют для транспортирования обрабатываемых заготовок различных типов в таре и закрепленных на спутниках, приспособлений, режущих инструментов и тары со стружкой.
На рис. 67 приведена конструкция автоматической транспортной тележки, которая перемещается по прямолинейным рельсовым путям 11. Она состоит из сварной рамы 8 с двумя осями, несущими две пары колес 9, С торцов рамы смонтированы подвижные дуги б для автоматического включения системы торможения и останова тележки в случае наезда на посторонние предметы. Привод тележки 10 имеет электродвигатель постоянного тока и редуктор 7, питание осуществляется от шины 2. Механизм фиксации обеспечивает останов тележки в заданных местах. Управляют тележкой от пульта 5. Спутник 1 с заготовкой устанавливают на направляющих 3, по которым он перемещается от привода 4 при передаче спутника на рабочий стол станка или в накопитель
В ГПС широко применяют безрельсовые самодействующие транспортные тележки (робокары). Робокары - это автоматически адресуемые тележки с электронным управлением, перемещающиеся непосредственно по полу, оснащенные устройствами для приема и передачи спутников с деталями и поддонов. Они зарекомендовали себя как универсальное средство для выполнения межучастковых и межоперационных транспортных операций. По сравнению с другими средствами транспортирования они имеют следующие преимущества: малогабаритны, имеют большой диапазон скоростей перемещений с автоматизацией направления перемещения, с автономностью управления, возможностью использования проездов (трасс) для других видов транспорта.

Возможности безрельсовых грузонесущих автоматических транспортных тележек (робокар) очень широки за счет простоты создания новых транспортных путей и оснащения робокар устройствами автоматизации погрузочно-разгрузочных операций. Многие фирмы выпускают транспортные тележки подобного типа. Среди отечественных конструкций подобных тележек следует отметить автоматические тележки типа «Электроника», МП-12Т, конструкции ИАЭ им. И.В. Курчатова и др.
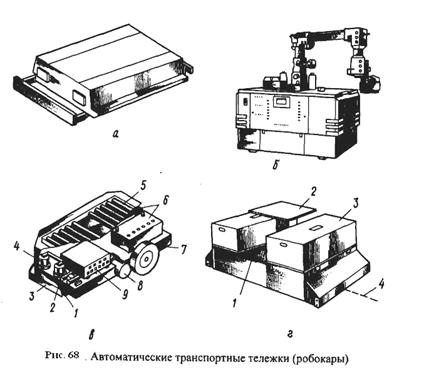
На рис. 68 приведены некоторые типы робокар, а в табл. 10 даны их технические характеристики управления движением и подъемом платформы выполнены на основе микроЭВМ. Устройство маршрутослежения оптоэлектронного типа (излучатель - светоотражающая полоса). В корпусе тележки расположены также датчики контроля за состоянием ряда узлов. Безопасность эксплуатации обеспечивается применением механического отключения привода от дуги безопасности, срабатывающего при касании ею препятствия.
Табл. 10 Технические характеристики робокаров

Информацию о маршруте движения робокара получают на станциях останова, размещенных у склада и оборудования, посредством оптоэлектронной системы обмена информацией без электрического контакта.
Автоматическая транспортная тележка (робокар) типа МП-12Т со смонтированным на ней промышленным роботом показана на рис.68, б. Робокар предназначен для систем межоперационного транспортирования поддонов общей массой до 200 кг. Робокар состоит из подвижной грузовой платформы на четырехколесном шасси и промышленного робота, которые управляются бортовой микроЭВМ «Электроника-60». Конструкция тележки и робота модульные, рассчитанные на несколько модификаций. Трасса движения обозначена в виде светоотражающей полосы, для слежения за ней предусмотрены специальные датчики. В передней части подвижной платформы установлено устройство, обеспечивающее безопасность движения. Справа на борту платформы находятся датчики распознавания объекта и коррекции.
Электроробокар, разработанный в Киевском политехническом институте, показан на рис. 68, в. Он предназначен для транспортирования заготовок и деталей общей массой до 20 кг. Робокар выполнен на базе стандартных узлов с трёхколёсным шасси 7. Электромеханический привод главного движения 8 представляет собой электродвигатель постоянного тока с планетарным редуктором. В приводе поворота 4 использован волновой мотор-редуктор с электродвигателем постоянного тока при напряжении питания 24 В. Питание электродвигателей главного движения и привода поворота осуществляется от аккумуляторов 6
Грузовая платформа 5 представляет собой поворотный стол с двумя фиксированными положениями. Загрузочное устройство - пневматический манипулятор с двумя степенями подвижности. На грузовой платформе может быть установлено две кассеты с заготовками. Воздух или масло подводится к манипулятору через узел стыковки.
Система управления 9 основана на использовании иерархической структуры с тремя уровнями. Общесистемный или стратегический уровень реализован на ЭВМ СМ-4, тактический и исполнительный - на микроЭВМ «Электроника-60», смонтированных внутри электрокара.
Система сложения за маршрутом 1 оптоэлектронного типа. Задача движения по трассе реализована с помощью комбинированной системы слежения, включающей в себя индуктивный и два оптических канала. Безопасность перемещения обеспечивается тактильной системой блокировки 3. Локационная система стыковки 2 обеспечивает распознавание и стыковку робокара с технологическим оборудованием.
Робокар системы Flexmatic (Франция) приведен на рис. 68, г. Электрокар имеет электронное оборудование, расположенное в корпусе 1 и обеспечивающее следование по трассе. Маршрут определяется и оптимизируется ЭВМ согласно типу детали, установленной на платформе 2, технологической последовательности ее обработки и возможным вариантом передвижения. Трасса представляет собой изолированный электрический кабель 4, проложенный в полу на глубине 2 см. Этот кабель является проводником электрического тока определенной частоты. Переменный ток возбуждает магнитное поле, которое воспринимается катушкой, установленной на робокаре, и далее следящей системой управления каром. Установленные в грунте и на карах контакты обеспечивают обмен информацией между карами и ЭВМ.
Привод электрокара электрический и работает от аккумуляторов с запасом работы на 4-5 ч. Скорость передвижения по трассе 0,75 м/с при массе транспортируемого груза 1500 кг. Аккумуляторные батареи электрокара установлены в специальных контейнерах 3.
Робокары снабжены двигательным управляющим агрегатом со следящими системами скорости и положения по отношению к направляющему проводу, эмиттерами и приемниками для диалога и телеуправления, логической схемой, которая управляет робокаром исходя из получаемых команд.
Робокары являются примером широко универсального автоматизированного транспортного средства, которое можно использовать для транспортирования обрабатываемых заготовок и других грузов в гибких производственных системах различного технического назначения.
Комплексы с робокарами для транспортирования обрабатываемых заготовок позволяют повысить гибкость их компоновки и сконцентрировать на одном участке с расположением оборудования, более удобным для обслуживания оператором, чем при применении автоматических транспортных тележек, перемещающихся по рельсовому пути, или других напольных транспортных средств.
Гибкая производственная система фирмы Shin Nippon Koki Ко, Ltd (Япония) для обработки крупногабаритных деталей показана на рис. 69. ГПС предназначена для обработки деталей судовых дизелей шести наименований с максимальными размерами по длине 2200 мм, ширине 900 мм, высоте 900 мм и массой до 2000 кг. В ГПС входят механический цех б, в котором установлено три многоцелевых станка 5 и имеются позиции накопления 4 приспособлений с роботом перегрузки (робокаром) 3, загрузки-разгрузки и переналадки 8, накопления поддонов-спутников 1 заготовок, а также робот-перегрузчик заготовок (робокар) 2.

Для транспортирования заготовок и приспособлений используются два промышленных робота (робокара), совершающие продольное и поперечное движения с помощью установленной под полом ведущей индукционной антенны. Робокары 2 предназначены для транспортирования заготовок и поддонов общей массой до 4000 кг. Они транспортируют поддоны с заготовками от позиций 8 и / к механизмам автоматической смены заготовок многоцелевых станков 5, а также транспортируют поддоны с обработанными деталями на позицию накопления поддонов-спутников 1.
Робокар 3 для перевозки приспособлений малогабаритен и высокоскоростной (мини-робот). Он предназначен для транспортирования приспособлений с позиции накоплений 4 по станкам 5 ГПС и обратно. Вся ГПС управляется из компьютерного пункта 7.
Промышленные роботы
Промышленные роботы являются универсальным средством комплексной автоматизации производственных процессов. При автоматизации металлорежущего оборудования с помощью промышленных роботов устанавливают заготовки в рабочую зону станка, снимают детали со станка и раскладывают их в тару (накопитель), передают от станка к станку, кантуют детали (заготовки) в процессе обработки и транспортируют их, очищают базовые поверхности деталей и приспособлений, меняют инструмент и осуществляют другие операции.






